西門子模塊6SE7031-8ES87-1FE0
S7-200 SMART CPU 模塊本體集成1 個以太網(wǎng)接口和1 個RS485 接口,通過擴展CM01 信號板,,其通信端口數(shù)量多可增至3 個,。可滿足小型自動化設備連接觸摸屏,、變頻器等第三方設備的眾多需求,。
以太網(wǎng)通信
所有CPU 模塊標配以太網(wǎng)接口,支持西門子S7 協(xié)議,、TCP/IP 協(xié)議,、有效支持多種終端連接:
可作為程序下載端口(使用普通網(wǎng)線即可)
與SMART LINE HMI 進行通信
通過交換機與多臺以太網(wǎng)設備進行通信,實現(xiàn)數(shù)據(jù)的快速交互
多支持4 個設備通信
串口通信
S7-200 SMART CPU 模塊均集成1 個RS485 接口,,可以與變頻器,、觸摸屏等第三方設備通信。如果需要額外的串口,,可通過擴展CM01 信號板來實現(xiàn),,信號板支持RS232/RS485 自由轉(zhuǎn)換,多支持4 個設備,。串口支持下列協(xié)議:
Modbus-RTU
PPI
USS
自由口通信
與上位機的通信
通過PC Access,,操作人員可以輕松通過上位機讀取S7-200 SMART 的數(shù)據(jù),,從而實現(xiàn)設備監(jiān)控或者進行數(shù)據(jù)存檔管理。
(PC Access 是專門為S7-200 系列PLC 開發(fā)的OPC 服務器協(xié)議,,專門用于小型PLC 與上位機交互的OPC 軟件)
運動控制
三軸 100 kHz 高速脈沖輸出,,實現(xiàn)定位.
運動控制基本功能
標準型晶體管輸出CPU 模塊,ST40/ST60 提供3 軸100 kHz 高速脈沖輸出,,支持PWM(脈寬調(diào)制)和PTO 脈沖輸出
在PWM 方式中,,輸出脈沖的周期是固定的,脈沖的寬度或占空比由程序來調(diào)節(jié),,可以調(diào)節(jié)電機速度,、閥門開度等
在PTO 方式(運動控制)中,輸出脈沖可以組態(tài)為多種工作模式,,包括自動尋找原點,,可實現(xiàn)對步進電機或伺服電機的控制,達到調(diào)速和定位的目的
CPU 本體上的Q0.0,,Q0.1 和Q0.3 可組態(tài)為PWM 輸出或高速脈沖輸出,,均可通過向?qū)гO置完成上述功能
PWM 和運動控制向?qū)гO置
為了簡化您應用程序中位控功能的使用,STEP 7- Micro/WINSMART 提供的位控向?qū)Э梢詭椭趲追昼妰?nèi)全部完成PWM,、PTO 的組態(tài),。該向?qū)Э梢陨晌豢刂噶睿梢杂眠@些指令在您的應用程序中對速度和位置進行動態(tài)控制,。
PWM 向?qū)гO置根據(jù)用戶選擇的PWM 脈沖個數(shù),, 生成相應的PWMx_RUN 子程序框架用于編輯。
運動控制向?qū)Ф嗵峁? 軸脈沖輸出的設置,,脈沖輸出速度從20 Hz 到100 kHz 可調(diào),。
運動控制功能特點
提供可組態(tài)的測量系統(tǒng),輸入數(shù)據(jù)時既可以使用工程單位(如英寸或厘米),,也可以使用脈沖數(shù)
提供可組態(tài)的反沖補償
支持,、相對和手動位控模式
支持連續(xù)操作
提供多達32 組運動動包絡,每組包絡多可設置16 種速度
提供4 種不同的參考點尋找模式,,每種模式都可對起始的尋找方向和終的接近方向進行選擇
西門子SMART EM AI04 AE04模擬量輸入模塊


西門子模塊6SE7031-8ES87-1FE0
MICROMASTER 4 (MM4): 在MICROMASTER 4 Profibus模塊上使用外部24V電源需要考慮什么,?
1. 電流消耗:
對外形尺寸E的MICROMASTER 4變頻器,額定電流消耗為350mA,,對外形尺寸F到GX,,額定電流消耗為400mA。BOP 或 AOP 控制面板中的所有的數(shù)字輸入(處于開通狀態(tài)) 的損耗,, 都包含在額定電流損耗里,。
如果安裝了編碼器模塊,則附加100mA的電流損耗,。為了補償電壓波動和上電瞬間可能出現(xiàn)的浪涌現(xiàn)象,,需要多考慮50%的電流損耗,。
因此電流消耗應該在350mA(理想情況下)到750mA(不利的情況下)之間,。
2. MICROMASTER 的內(nèi)部連接
PROFIBUS模塊的供電端子(–) 與MICROMASTER 4的隔離0V端子處于同電位,,直接相連
對MICROMASTER 420來說, 為端子9
對 MICROMASTER 430和MICROMASTER 440來說, 為端子28
(+) 端子通過一個阻塞二級管連接到隔離24V端子上
對MICROMASTER 420來說, 為端子8
對MICROMASTER 430 和 MICROMASTER 440來說, 為端子9
3. 故障和報警
A0503 = 欠壓報警
變頻器電源斷開,而DP模塊(Profibus模塊)通過外部24V供電,,在這種情況下,,會報A0503。
可忽略該報警,。
通常,,控制電源取自變頻器的直流母線,電源電壓也是通過直流母線檢測的,。當變頻器斷電時,,而控制電源取自外部24V,這時直流母線是沒有電壓的,,因此會報A0503,。
F0003 = 欠壓故障 & F0060 = Asic 超時故障
驅(qū)動運行時,DP模塊 (PROFIBUS模塊)通過外部24V供電,,而未連接電源(200到600V AC),。在這種情況下,變頻器會報F0003并停機,。
變頻器的電源斷開, DP 模塊(PROFIBUS 模塊) 通過外部24V供電,,給上運行命令。
對于固件版本高于1.05的MICROMASTER 420:
由于變頻器沒有電源, 控制單元與功率單元之間不能完成通訊,,會出現(xiàn)F0060而不是F0003,。只讀參數(shù)可能顯示錯誤,比如,,r0037,,變頻器的溫度。
對固件版本1.05及以下的MICROMASTER 420和版本1.17及以下的MICROMASTER 440:
即使實際上,,偶爾也會報以下故障:
F0001 = 過流
F0002 = 過壓
F0003 = 欠壓
F0004 = 變頻器過熱
F0005 = 變頻器I2/t過載
F0022 = 組件故障
F0060 = Asic超時
一旦重新上電,,這些故障即可以復位,比如同過Profibus控制字的位7,。對于500 – 600 V MICROMASTER 440來說,,故障 F0002 可以馬上被復位。
4. I/O 功能
MICROMASTER 420
使用外部24V供電時,,所有版本MM420的輸入輸出都有效,。
MICROMASTER 430/ MICROMASTER 440
固件版本2.02以上的MM430和固件版本2.08以上的MM440,除了外形尺寸Fx**) 和Gx**)的模擬量輸入與輸出以外,,所有的數(shù)字與模擬量輸入輸出都是有效的,。
固件版本2.02以下的MM430和固件版本2.08以下的MM440,,對于繼電器輸出和模擬輸入輸出,有一些限制條件,。數(shù)字輸入仍然有效,。
固件版本2.02以上的MM430和固件版本2.08以上的MM440,如果一個電動機PTC連接到端子14和15,,P0601=1,,當變頻器電源斷開時,不會出現(xiàn)F0011和F0015,。
固件版本2.02以下的MM430和固件版本2.08以下的MM440,,在這種情況下,會報F0015(PTC開路/短路),,再次電源合閘后,,該故障可以重新復位。
早提供PROFIBUS模塊時,,MM4的固件版本如下:
MICROMASTER 420: 固件版本1.05;
MICROMASTER 430: --------------------;
MICROMASTER 440: 固件版本1.16*).
*) 在提供PROFIBUS模塊后, MM440 的固件版本很快升級到了1.17.
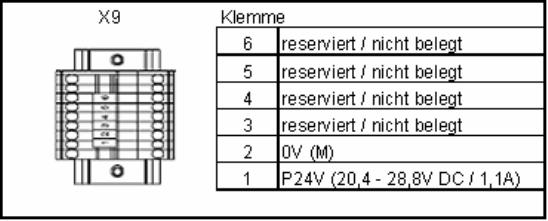
**) 對于FX和GX尺寸的變頻器,,為了獲得可靠的控制電源,應該通過端子X9供電,,而不是通過總線模塊供電,。
 您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)














