您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)










| 應用領域 | 化工,電子/電池,電氣 | 產(chǎn)地 | 德國 |
|---|---|---|---|
| 品牌 | 西門子 |
運動控制
PLC可用于控制圓周運動或線性運動。從控制機構(gòu)配置的角度來看,早期使用開關I / O模塊來連接位置傳感器和致動器現(xiàn)在通常使用專用的運動控制模塊,。例如可以驅(qū)動步進電機或伺服電機的單軸或多軸位置控制模塊。所有主要PLC制造商的產(chǎn)品幾乎都具有運動控制功能,,廣泛應用于各種機械,,機床,機器人,,電梯等,。
4、控制
控制是指溫度,、壓力,、流量等模擬量
 |
| 參考價 | ¥666 |
| 訂貨量 | 1臺 |
更新時間:2022-11-23 22:04:49瀏覽次數(shù):462
聯(lián)系我們時請說明是化工儀器網(wǎng)上看到的信息,,謝謝!
 |
 |
 |
 |
|
西門子進線電抗器6SL3000-0CE23-6AA0
西門子PLC在德國的應用
我們都知道西門子PLC是德國西門子的主要產(chǎn)品,為了讓人們更好地理解本產(chǎn)品,,我們現(xiàn)在將介紹西門子PLC在德國的應用領域,。
目前,PLC已廣泛應用于鋼鐵,,石油,,化工,電力,,建材,機械制造,,汽車,,紡織,交通,環(huán)保,,文化等各個行業(yè),。用法大致可分為以下幾類。
1,、開關量的邏輯控制
這是PLCZUI的基礎和廣泛應用的領域,。它取代了繼電器電路,實現(xiàn)了邏輯控制和順序控制,。它不僅可以用于單臺設備的控制,,還可以用于多機集群控制和自動化線路。如注塑機,、印刷機,、裝訂機、組合機床,、磨床,、包裝生產(chǎn)線、電鍍生產(chǎn)線等,。
2,、模擬量控制
在工業(yè)生產(chǎn)中,數(shù)量上有許多連續(xù)的變化,,如溫度,、壓力、流量,、液位和速度都是模擬量,。為了使可編程控制器能夠處理模擬量,必須在模擬量和數(shù)字量之間實現(xiàn)a/d轉(zhuǎn)換和d/a轉(zhuǎn)換,。plc制造商生產(chǎn)支持的a/d和d/一個轉(zhuǎn)換模塊,,允許可編程控制器用于模擬控制。
西門子嵌入式控制器,,西門子位置開關,,西門子數(shù)控,西門子模塊化控制器,,西門子嵌入式控制器,,西門子行程開關,西門子位置開關,,西門子數(shù)控
西門子PLC在德國的應用
3,、運動控制
PLC可用于控制圓周運動或線性運動。從控制機構(gòu)配置的角度來看,,早期使用開關I / O模塊來連接位置傳感器和致動器現(xiàn)在通常使用專用的運動控制模塊,。例如可以驅(qū)動步進電機或伺服電機的單軸或多軸位置控制模塊。所有主要PLC制造商的產(chǎn)品幾乎都具有運動控制功能,廣泛應用于各種機械,,機床,,機器人,電梯等,。
4,、控制
控制是指溫度、壓力,、流量等模擬量的閉環(huán)控制,。PLC作為工業(yè)控制計算機,可以編制各種控制算法程序,,完成閉環(huán)控制,。PID調(diào)節(jié)是一般閉環(huán)控制中常用的一種調(diào)節(jié)方式。大中型PLC都有PID模塊,,目前許多小型PLC也有此功能模塊,。一般來說,PID處理是運行一個特殊的PID子程序,??刂茝V泛應用于冶金、化工,、熱處理,、鍋爐控制等領域。
西門子,、西門子壓力傳輸器,、西門子傳感器、西門子傳輸器,、西門子超聲波流量計,、西門子超聲液位計、西門子液位計,、西門子數(shù)字膨脹模塊西門子控制器,、西門子邏輯模塊、西門子模塊化控制器,、
5,、數(shù)據(jù)處理
現(xiàn)代PLC具有數(shù)字運算(包括矩陣運算、函數(shù)運算,、邏輯運算),、數(shù)據(jù)傳輸、數(shù)據(jù)轉(zhuǎn)換,、排序,、查表,、位運算等功能。它可以完成數(shù)據(jù)的采集,、分析和處理??梢詫⑦@些數(shù)據(jù)與存儲在存儲器中的參考值進行比較以完成某些控制操作,,也可以通過通信功能將這些數(shù)據(jù)傳送到其他智能設備,或者將它們打印并制成表格,。數(shù)據(jù)處理一般用于大規(guī)??刂疲鐭o控制的柔性制造,,也可用于控制,,如造紙、冶金,、食品等行業(yè)中的一些大型控制
西門子進線電抗器6SL3000-0CE23-6AA0
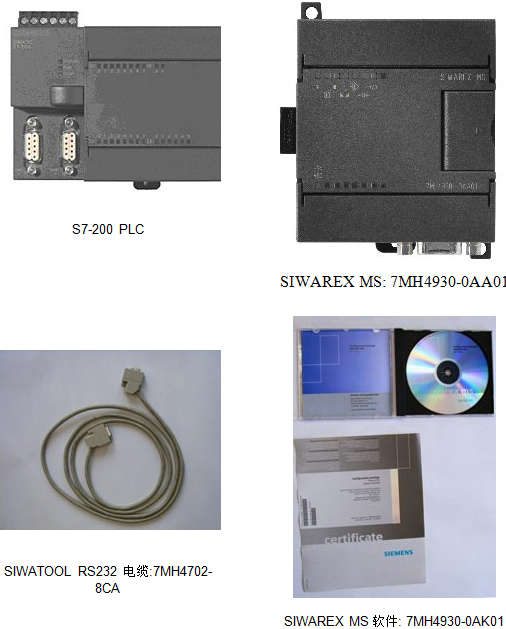
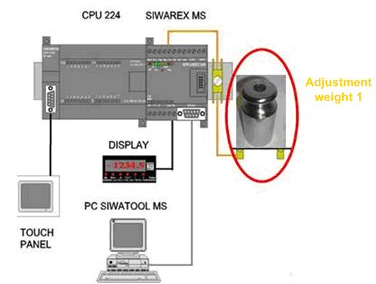
所需硬件和軟件如下: SIWAREX MS 模塊, S7-200 CPU, SIWATOOL MS軟件, RS232 電纜, 帶Windows XP操作系統(tǒng)或更高的計算機和一個標定砝碼(重量值要求是稱重傳感器總量程的5%以上).
所需硬件:

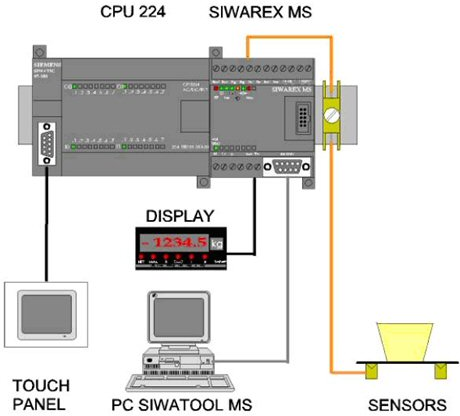
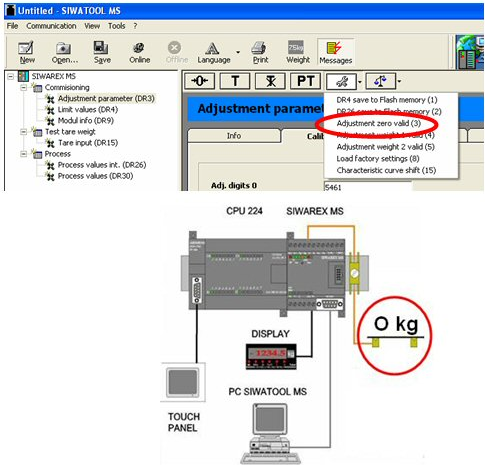
實物接線示意圖如下

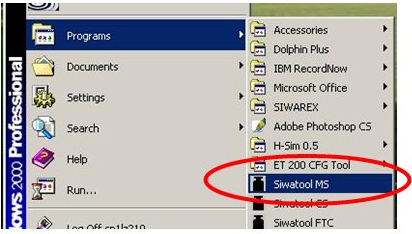
啟動SIWATOOL MS.
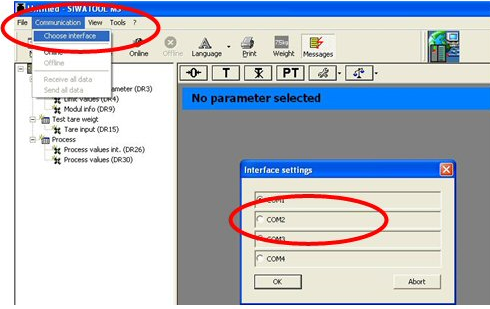
選擇COM1口作為通訊口.
點擊 Online

SIWAREX MS分辨率
重量值被轉(zhuǎn)換為16位值.
數(shù)值在0到64000之間
數(shù)值以有符號位整數(shù)型式傳送到SIMATIC PLC中

INT 無小數(shù)點無單位, 值為 32767
比如一個20kg 的重量 ,,可以選擇分辨率為1 g:
范圍從 0 g到20000 g
比如一個40 kg 的重量,可以選擇的分辨率小只能 為10 g
范圍從 0.00 kg 到40.00 kg
小數(shù)點不是整數(shù)的一部分,,僅僅是用作顯示
參數(shù)化以前首先選擇分辨率和小數(shù)點位數(shù).
建立通訊連接后, 按照以下步驟進行校秤.
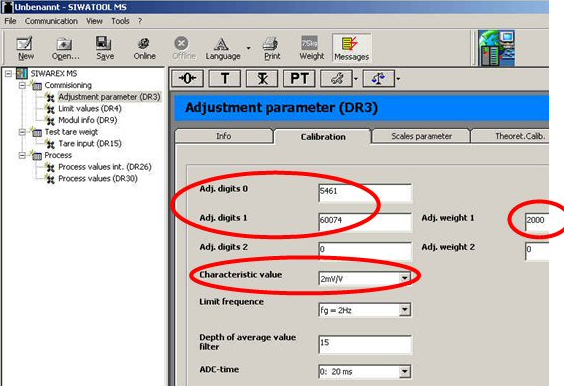
Adj.digits 0 和Adj.digits 1: 接受默認值.
Adj.weight 1: 輸入校準的 (標定的) 重量.
Characteristic Value: 傳感器特征值. 傳感器上會標識. 默認值是 2 mV/V.
Limit frequency: 低通濾波(0.05 Hz ~ 5 Hz).
如果設定為 5 Hz, 顯示重量會隨重量的改變快速改變; 如果設定為 0.5 Hz, 顯示重量會“慢慢移動".
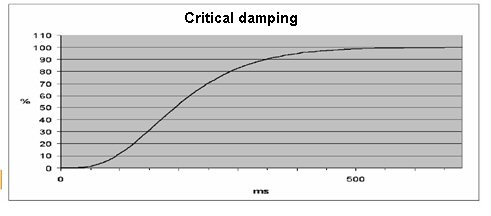
例如 fg = 2 Hz 的低通濾波階躍響應曲線
Depth of average value filter平均值濾波器的深度: n=2 ~ 255.
平均值濾波器的作用是讓秤量值變得穩(wěn)定,,防止干擾波動.
重量值是根據(jù)n個重量值的平均值而測定的.
如果n = 10, 那么就會有10個測量值被用來計算平均值. 每過20 (or 33.3)毫秒,舊的值被拋棄而的值將會被包括到計算中.
測量時間依靠電源的供電頻率. 如50 Hz. 選擇20 ms ,,如 60 Hz s選擇33.3 ms.
設置完參數(shù)后,,按 Send.

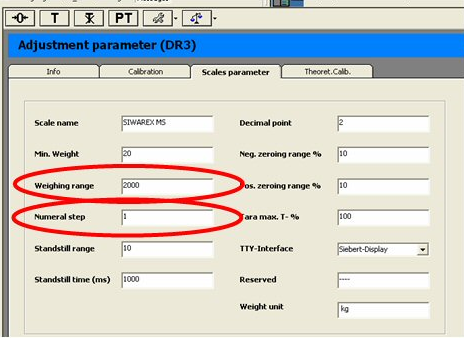
設置秤的量程范圍和秤的小跳變值(分辨率)值.
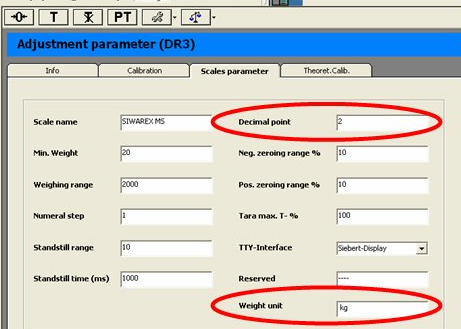
設定重量單位及重量的小數(shù)點位數(shù)如下:
Standstill time (ms)穩(wěn)態(tài)時間,監(jiān)視用于識別秤何時處于一種穩(wěn)定的平衡狀態(tài).
如果重量值在一段規(guī)定時間(穩(wěn)態(tài)時間)內(nèi)的變化小于一個規(guī)定的偏差范圍(穩(wěn)態(tài)值),,則秤的穩(wěn)態(tài)被確定.
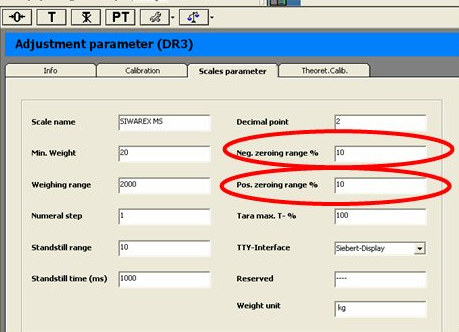
正的和負的置零范圍.
這個規(guī)范可以用作限制功能的作用,,因此保護稱重過程. 以量程范圍的百分數(shù)( %)表示. 如果當前毛重值太高或太低,置零功能將被禁止使用.
設置好參數(shù)后, 點擊Send.

確保秤是空的(無負載),,然后點擊 Adjustment zero valid (3).
放置校準砝碼在秤上,,以便校準秤的范圍.
點擊 Adjustment weight 1 valid (4).
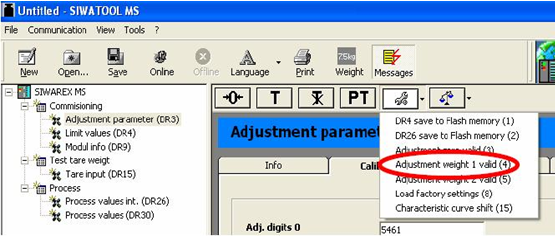
標定完成.
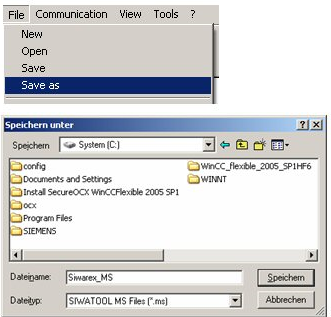
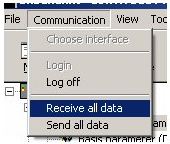
后,可以保存標定數(shù)據(jù)
接收MS模塊所有數(shù)據(jù)信息到PC中
從Siwarex MS 模塊到PC機傳送信息過程中, 以下信息窗口會出現(xiàn):
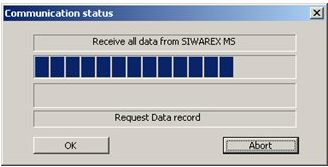
以Siwatool MS文件保存數(shù)據(jù):