西門子模塊6SL3130-6AE21-0AB1
SIMATIC S7-200的應(yīng)用領(lǐng)域從更換繼電器和接觸器一直擴(kuò)展到在單機(jī),、網(wǎng)絡(luò)以及分布式配置中更復(fù)雜的自動化任務(wù),。S7-200也越來越多地提供了對以前曾由于經(jīng)濟(jì)原因而開發(fā)的特殊電子設(shè)備的地區(qū)的進(jìn)入。文本顯示器TD200不僅是一個用于顯示系統(tǒng)信息的顯示設(shè)備,,還可以作為控制單元對某個量的數(shù)值進(jìn)行修改,,或直接設(shè)置輸入/輸出量。文本信息的顯示用選擇/確認(rèn)的方法,,zui多可顯示80條信息,,每條信息zui多4個變量的狀態(tài)。過程參數(shù)可在顯示器上顯示,,并可以隨時修改,。TD200面板上的8個可編程序的功能鍵,每個都分配了一個存儲器位,,這些功能鍵在啟動和測試系統(tǒng)時,,可以進(jìn)行參數(shù)設(shè)置和診斷
作為 PPI接口,用于編程功能,、HMI 功能(TD 200,、OP),S7-200 內(nèi)部 CPU / CPU 通信(9.6/19.2/187.5 kbps),或作為 MPI從站,,用于和 MPI 主站(S7-300 / -400,、OP、TD,、按鈕板)進(jìn)行數(shù)據(jù)交換,。
用戶可編程接口(FreePort),帶中斷能力,,用于和非西門子設(shè)備進(jìn)行串行數(shù)據(jù)交換,,例如在 ASCII 協(xié)議下、波特率為 1.2/2.4/4.8/9.6/19.2/38.4/57.6/115.2 Kbit/s時,,可將 PC / PPI 電纜用作為 RS 232/ RS 485 適配器,。
3RV1011-1EA15 產(chǎn)品說明 斷路器-規(guī)格S00;脫扣等級10,;A過流脫扣電流:2.8...4A,;N過流脫扣電流:52A;螺釘端子,;標(biāo)準(zhǔn)切換容量,;帶有轉(zhuǎn)換輔助開關(guān)1NC
3RV10111EA20 產(chǎn)品說明 斷路器-S00規(guī)格;脫扣等級10,;A過流脫扣電流:2.8...4A,;N過流脫扣電流:52A;籠卡式接線端子,;標(biāo)準(zhǔn)切換容量
3RV1011-1EA20-ZW95 產(chǎn)品說明 斷路器(2.8…4A)-過流脫扣電流:52A,;規(guī)格S00;脫扣等級10,、籠卡式接線端子和標(biāo)準(zhǔn)中斷容量
3RV1011-1EA20-ZW96 產(chǎn)品說明 斷路器(2.8…4A)-過流脫扣電流:52A,;規(guī)格S00;脫扣等級10,、籠卡式接線端子和標(biāo)準(zhǔn)中斷容量
斷路器(規(guī)格S0),,脫扣等級10;A 過流脫扣電流2.2...3.2A,,N 過流脫扣電流42A,;螺釘連接;標(biāo)準(zhǔn)中斷容量,,帶有轉(zhuǎn)換輔助開關(guān)1NC
小型機(jī): 小型機(jī)的控制點(diǎn)一般在256點(diǎn)之內(nèi),適合于單機(jī)控制或小型系統(tǒng)的控制,。
西門子小型機(jī)有S7-200:處理速度0.8~1.2ms ;存貯器2k ,;數(shù)字量248點(diǎn),;模擬量35路 ,。
中型機(jī):中型機(jī)的控制點(diǎn)一般不大于2048點(diǎn),可用于對設(shè)備進(jìn)行直接控制,還可以對多個下一級的可編程序控制器進(jìn)行監(jiān)控,,它適合中型或大型控制系統(tǒng)的控制。
西門子中型機(jī)有S7-300:處理速度0.8~1.2ms ,;存貯器2k ,;數(shù)字量1024點(diǎn);模擬量128路 ,;網(wǎng)絡(luò)PROFIBUS,;工業(yè)以太網(wǎng);MPI,。
大型機(jī):大型機(jī)的控制點(diǎn)一般大于2048點(diǎn),不僅能完成較復(fù)雜的算術(shù)運(yùn)
西門子PLCS7-400系列
西門子PLCS7-400系列
算還能進(jìn)行復(fù)雜的矩陣運(yùn)算,。它不僅可用于對設(shè)備進(jìn)行直接控制,還可以對多個下一級的可編程序控制器進(jìn)行監(jiān)控,。
西門子大型機(jī)有S7-400 :處理速度0.3ms / 1k字,;
存貯器512k ;I/O點(diǎn)12672,;
控制性能
可以分為機(jī),、中檔機(jī)和低檔機(jī)。
通過前端連接器連接傳感器/執(zhí)行器,??墒褂靡韵逻B接方式進(jìn)行連接:
更換模塊后,只需將連接器插入相同類型的新模塊中,,并保留原來的布線,。前端連接器的編碼可避免發(fā)生錯誤。
連接 SIMATIC TOP 更加簡單,、快速(不是緊湊 CPU 的板載 I/O),。可使用預(yù)先裝配的帶有單個電纜芯的前端連接器,,和帶有前端連接器模塊,、連接線纜和端子盒的完整插件模塊化系統(tǒng)。
模塊中為數(shù)眾多的通道使 S7-300 實(shí)現(xiàn)了節(jié)省空間的設(shè)計,??墒褂妹總€模塊中有 8 至 64 個通道(數(shù)字量)或 2 至 8 個通道(模擬量)的模塊。
使用 STEP 7 對這些模塊進(jìn)行組態(tài)和參數(shù)化,,并且不需要進(jìn)行不便的轉(zhuǎn)換設(shè)置,。數(shù)據(jù)進(jìn)行集中存儲,如果更換了模塊,,數(shù)據(jù)會自動傳輸?shù)叫碌哪K,,避免發(fā)生任何設(shè)置錯誤。使用新模塊時,無需進(jìn)行軟件升級,??筛鶕?jù)需要復(fù)制組態(tài)信息,例如用于標(biāo)準(zhǔn)機(jī)器,。返回頁首
設(shè)計和功能
許多不同的數(shù)字量和模擬量模塊根據(jù)每一項(xiàng)任務(wù)的要求,,準(zhǔn)確提供輸入/輸出。
數(shù)字量和模擬量模塊在通道數(shù)量,、電壓和電流范圍,、電氣隔離、診斷和警報功能等方面都存在著差別,。在這里提到的所有模塊范圍中,,SIPLUS 組件可用于擴(kuò)展的溫度范圍 -25…+60°C 和有害的空氣/冷凝。
診斷,、中斷
許多模塊還會監(jiān)控信號采集(診斷)和從過程(過程中斷)中傳回的信號,。這樣便可對過程中出現(xiàn)的錯誤(例如斷線或短路)以及任何過程事件(例如數(shù)字輸入時的上升邊或下降邊)立刻做出反應(yīng)。使用 STEP 7,,即可輕松對控制器的響應(yīng)進(jìn)行編程,。
模塊
用于測試和仿真時,模擬量模塊可插入到 S7-300,。該模塊通過 LED 轉(zhuǎn)換和指示輸出信號,,實(shí)現(xiàn)對編碼器信號的模擬。
該模塊可插入到任何地方(不必遵守插槽規(guī)則),。該虛擬模塊為未組態(tài)的信號模塊預(yù)留了一個插槽,。稍后安裝該模塊時,整個組態(tài)的機(jī)械配置和地址分配均不會更改,。
通訊處理器用于把 S7-300 連接到不同的總線系統(tǒng)/通訊網(wǎng)絡(luò)上,,以及進(jìn)行點(diǎn)到點(diǎn)連接。根據(jù)應(yīng)用情況和模塊的不同協(xié)議,,可以提供不同的總線系統(tǒng),,如 PROFIBUS DP 或工業(yè)以太網(wǎng)。
SINAMICS G180 變頻調(diào)速柜系統(tǒng)包含 SINAMICS G180 緊湊型變頻調(diào)速柜,,這些調(diào)速柜與 Rittal TS8 柜體和客戶的控制附件相結(jié)合,,可產(chǎn)生具體調(diào)速柜系統(tǒng)。
使用
SINAMICS G180 變頻調(diào)速柜的制造符合相關(guān)標(biāo)準(zhǔn)和導(dǎo)則,,因此適合在世界任何地方使用(技術(shù)數(shù)據(jù)),。
西門子模塊6SL3130-6AE21-0AB1
4)啟動點(diǎn)動操作
點(diǎn)擊“R+"正轉(zhuǎn)按鈕后,按下鍵盤空格鍵,。X軸將進(jìn)入點(diǎn)動模式,。通過X軸的“Actual position"和“Speed"顯示框,,可以監(jiān)控X軸當(dāng)前的位置和速度;通過“Traverse Plus"指示燈知道軸當(dāng)前是正方向運(yùn)行(圖18),。
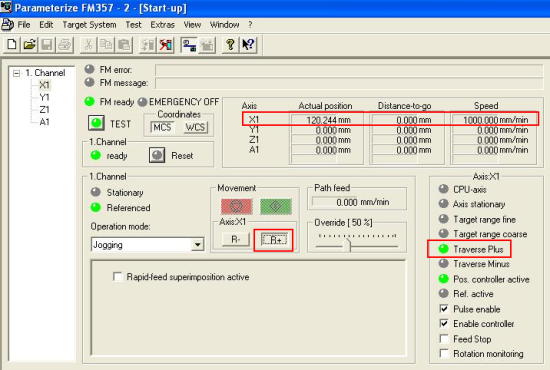
圖18 啟動點(diǎn)動模式
7.3 通過用戶程序調(diào)試
說明:FC101來自FM357-2標(biāo)準(zhǔn)例程,,這里不對FC101程序代碼作詳細(xì)解釋。
1)通過程序控制運(yùn)行,,先要不激活Start-up的測試功能,。點(diǎn)擊“TEST"確認(rèn)關(guān)閉測試功能。操作完成后“TEST"左側(cè)的指示燈熄滅(圖19),。
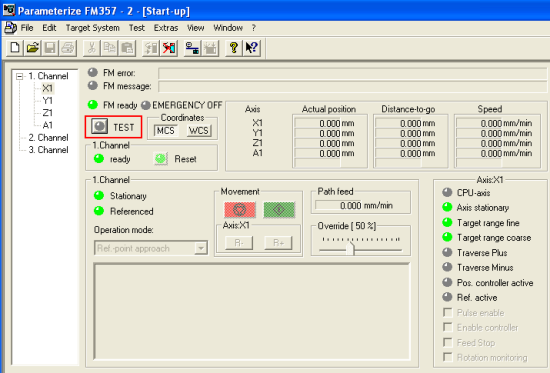
圖19 不激活測試功能
2)為了便于監(jiān)控和調(diào)試,建立變量表,,并在線(圖20),。
控制位:
DB115.DBX0.1=1 控制使能
DB115.DBX0.3=1 正向點(diǎn)動使能
狀態(tài)位:
DB115.DBX0.5=1 執(zhí)行沒有錯誤,當(dāng)前正方向運(yùn)行
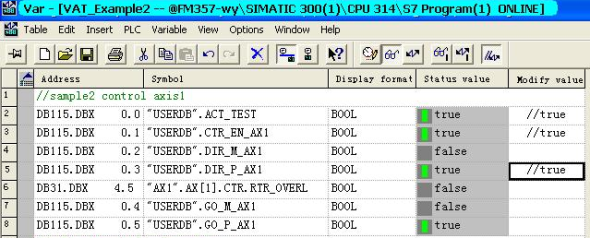
圖20 監(jiān)控變量表
3)同樣,,進(jìn)入Start-up可以監(jiān)控當(dāng)前位置和速度,。只是不能在Start-up中控制軸的運(yùn)行,因?yàn)楫?dāng)前由用戶程序控制(圖21),。
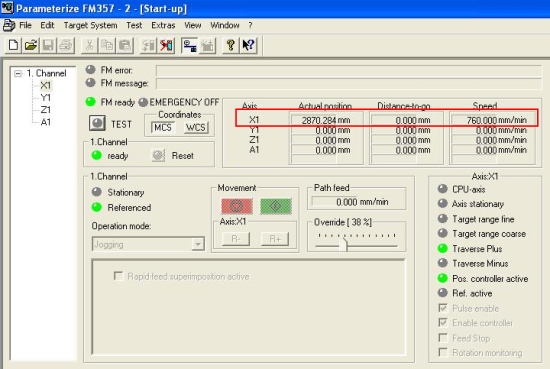
圖21 監(jiān)控位置和速度
8 錯誤診斷
FM357-2錯誤類型也很多,,并且不是每一種錯誤都會導(dǎo)致模板SF指示燈亮,通??梢酝ㄟ^Error analysis工具來讀取具體的錯誤原因,。
現(xiàn)在通過模擬一個錯誤來描述錯誤原因的讀取步驟。模擬的錯誤是將CPU314模式開關(guān)撥到“STOP"位置,,即停止CPU運(yùn)行,。
1)通過菜單命令“Test"?“Start-up",進(jìn)入Start-up界面,。從圖上可以看到FM已經(jīng)有錯誤顯示 “3000: Emergency stop"(圖22),。
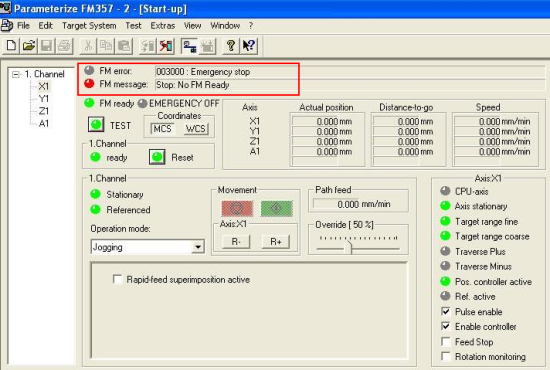
圖22 start-up界面
2)通過菜單命令“Test" ?“Error analysis",進(jìn)入Error analysis界面(圖23),。從圖中可以看到,,這里有2個錯誤。除了“3000: Emergency stop",,還有“2000: Sign-of-life monitoring: CPU not alive",。通過這2個錯誤描述可以發(fā)現(xiàn)與實(shí)際模擬錯誤是一致的。由于CPU沒有運(yùn)行,,所以在監(jiān)控時間內(nèi),,CPU沒有輸出確認(rèn)信號,導(dǎo)致FM357-2急停,。
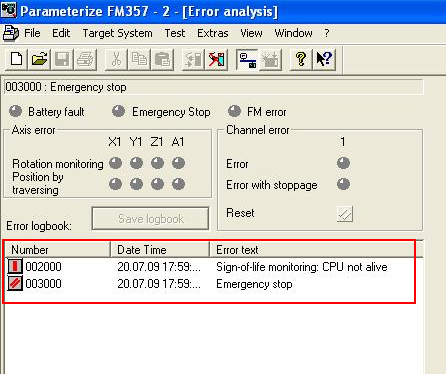
圖23 Error analysis
 您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)














