西門子S120濾波器6SL3000-0BE28-0DA0
SINUMERIK 840D sl 將 CNC,、HMI,、PLC、閉環(huán)控制和通信任務(wù)組合在一個 SINUMERIK NCU(NCU 710.3 PN,,NCU 720.3 PN,,NCU 730.3 PN)上。
針對操作,、編程和可視化,,NCU 的數(shù)控軟件中已集成相應(yīng)的 HMI 軟件,可在高性能 NCU 多處理器模塊上運行,??梢允褂?SINUMERIK PCU 50.5 工業(yè) PC 來提高操作性能。
一個 NCU/PCU 上可運行最多 4 個分布式操作員面板,。操作員面板可以作為瘦客戶機(jī)安裝在最遠(yuǎn) 100 m (328 ft) 距離內(nèi),。
高性能 NCU 多處理器模塊可安裝在 SINAMICS S120 變頻器系統(tǒng)的整流裝置左側(cè)。必要時,,NCU 可單獨安裝在最遠(yuǎn) 100 m (328 ft) 距離處,。西門子的 MOTION-CONNECT DRIVE-CLiQ 電纜用于連接。SINUMERIK 840D sl 提供了集成 PROFINET 功能,,并支持 PROFINET CBA 和 PROFINET IO,。
配套模塊化系統(tǒng)
模塊化數(shù)控系統(tǒng) SINUMERIK 840D sl 為各種機(jī)床應(yīng)用提供了的靈活性和開放性。*按照“混合搭配"(Mix and Match) 的原則,,各系統(tǒng)組件能夠相互匹配,,既可根據(jù)機(jī)床制造商的要求進(jìn)行量身定制,又能適應(yīng)機(jī)床的后續(xù)運行環(huán)境,。
Functions
性能和靈活性
不論是在數(shù)控系統(tǒng)領(lǐng)域還是操作領(lǐng)域,,SINUMERIK 840D sl 在軟硬件方面的可伸縮性為其在眾多領(lǐng)域的應(yīng)用奠定了*條件,。從簡單的定位任務(wù)到復(fù)雜的多軸系統(tǒng)都可適用。我們?yōu)槟募庸と蝿?wù)提供了多種類型的 NCU,。
采用 NCU 710.3B PN 時,,SINUMERIK 840D sl 支持總共 8 個軸,而采用 NCU 720.3 PN/NCU 730.3 PN 時支持的軸數(shù)可多達(dá) 31 個,。配合 CBE30-2 鏈接模塊使用時,,可支持總共 3 x 31 根軸。
西門子已將其全部銑削專業(yè)技術(shù)整合為 SINUMERIK MDynamics 工藝包,,以協(xié)助用戶在銑削時取得*佳的表面質(zhì)量,、精度、質(zhì)量和速度:
強(qiáng)大的 CNC 硬件和智能的 CNC 功能
操作簡單
統(tǒng)一的 CAD/CAM/CNC 過程鏈
所有領(lǐng)域內(nèi)的工藝技術(shù)
PROFINET IO 是用于模塊化分布式應(yīng)用的通訊方案,。PROFINET IO 基于工業(yè)以太網(wǎng),,可將分布式現(xiàn)場設(shè)備和 I/O 設(shè)備連接至 NCU??梢詫?128 個 PROFINET IO 設(shè)備作為 IO 控制器運行,。
用于機(jī)床對機(jī)床通訊的集成 PROFINET CBA(Component Based Automation:基于組件的自動化)功能可允許用戶基于具體流程實現(xiàn)機(jī)床和系統(tǒng)的模塊化并因此獲益:系統(tǒng)的標(biāo)準(zhǔn)化、再利用或擴(kuò)展變得更加簡單,。這使得對客戶需求的響應(yīng)更加快速靈活,,并通過組件級的預(yù)測試簡化和加速調(diào)試過程。
系統(tǒng)范圍的開放性
由于 HMI,、NC 和 PLC 具有開放性,,用戶可以充分利用自己的專業(yè)知識設(shè)計帖近自身需求的控制方案。SINUMERIK 840D sl 提供一直到 NCK 層的開放性,。SINUMERIK 840D sl 的開放式結(jié)構(gòu)和高運算性能意味著能夠根據(jù)各種*的機(jī)床運動系統(tǒng)對 CNC 功能進(jìn)行靈活快速且經(jīng)濟(jì)的匹配調(diào)整,。附加的工藝專用功能可作為編譯循環(huán)進(jìn)行補(bǔ)充裝載
西門子S120濾波器6SL3000-0BE28-0DA0
在STEP7 硬件組態(tài)里配置的報文類型是20,所以在變頻器的參數(shù)里, 一定要將P2079參數(shù)設(shè)置為"20“,,如下圖所示:
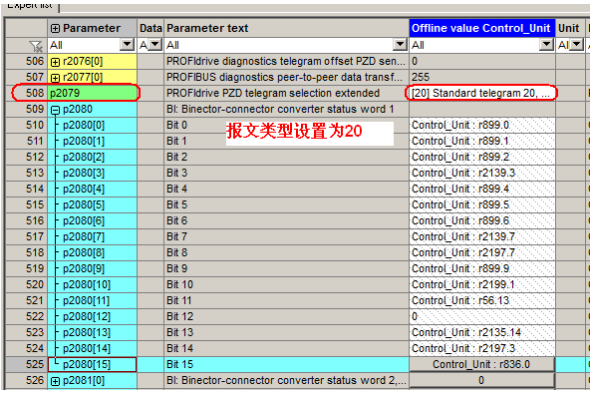
圖2-6 設(shè)置G120變頻器的報文類型
2.4 CFC編程
可以在已有的CFC中調(diào)用“FBDRIVE "通道驅(qū)動塊,,然后再插入相應(yīng)的電機(jī)功能塊進(jìn)行連線,也可以直接使用系統(tǒng)本身已經(jīng)組態(tài)好的Templates,。推薦使用后者,,因為前者需要對FBDRIVE塊相關(guān)的參數(shù)進(jìn)行配置,后者的參數(shù)已經(jīng)配置好了,,下面以使用模板為例說明:
2.4.1 插入模板并配置參數(shù)
首先打開系統(tǒng)的PCS 7 AP Library V80,,然后在Templates中找到“DRIVE"模板,它是針對“FbDrive"使用在緊湊型驅(qū)動器的模板,,如下圖:
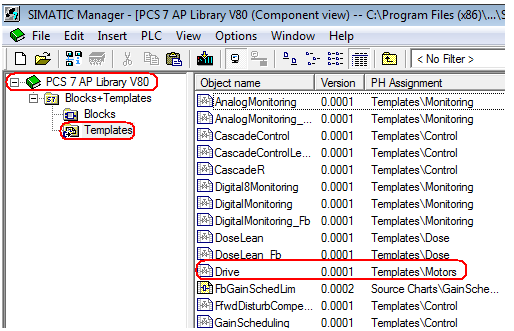
圖2-7 使用系統(tǒng)集成的Templates
拷貝上圖中的Drive 模板到CFC的工廠視圖相應(yīng)的層級下,,并修改Chart名字為EU1101(位號),雙擊打開,此模板已經(jīng)插入了相應(yīng)的可能使用到的CFC塊圖,,并且已經(jīng)進(jìn)行了連線,,根據(jù)DEMO的硬件設(shè)施,可以把三個互鎖的Interlock塊刪除掉(現(xiàn)場使用根據(jù)實際進(jìn)行選擇:

圖2-8 模板里預(yù)先連接好的功能塊
2.4.2 連接I/O 并生成模板驅(qū)動
選中FbDrive功能塊左側(cè)個引腳PZDIn1,,并將它連接到前邊定義的符號表地址EU1101_ZW1,,即是一個狀態(tài)字,當(dāng)然也可以直接輸入地址,,本例中地址為“IW512",,系統(tǒng)也會自動識別并顯示為對應(yīng)的符號地址,接下來一定要把報文的類型改為20, 如下圖,。
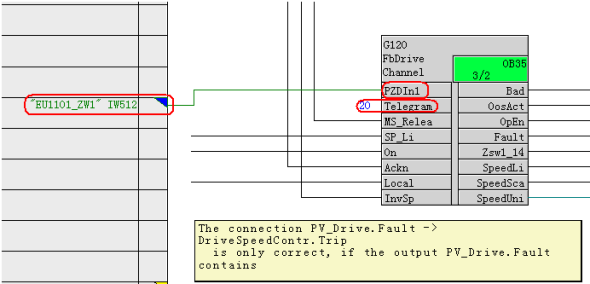
圖2-9 連接變頻器首地址并設(shè)置報文類型
保存編譯生成模板驅(qū)動后,,按F5刷新,可以看到如下圖的CFC程序,,PZDIn1至PZDin6和PZDOut1,、PDZOut2都會自動連線到相應(yīng)的符號表地址,并且Mode和DataXchg等管腳都自動生成連線,,如果發(fā)現(xiàn)MODE端沒有自動連線,,請檢查硬件組態(tài)與要求的是否一致,。
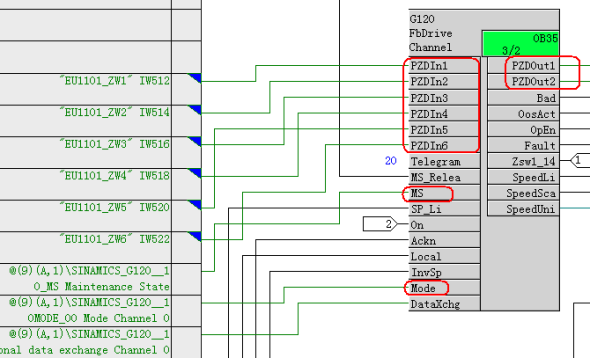
圖2-10 生成模板驅(qū)動后的FbDrive塊
2.4.3 FbDrive的常用引腳介紹
模板中的項目已經(jīng)對FBDRIVE和MOTSPCL塊進(jìn)行了相應(yīng)的連接, 主要連接介紹如下:
- MotSpdCL塊的Fwd和Rev經(jīng)過“OR"后連接到FbDrive的ON,, 用于馬達(dá)的啟停;
- MotSpdCL塊的P_Rst連接到FbDrive的Ackn,, 用于確認(rèn)變頻器的故障,;
- MotSpdCL塊的SP_OUT輸出到FbDrive的SP_Li引腳,用于變頻器速度的給定,;
- MotSpdCL塊的LocalAct輸出到FbDrive的Local引腳,,當(dāng)馬達(dá)切換至本地后,變頻器能夠?qū)⒖刂茩?quán)釋放給本地操作,;
- SP_OUT塊的Bad信號輸出到MotSpdCL的CSF引腳,,當(dāng)變頻器自身有問題時,馬達(dá)塊報“CSF"故障,;
- SP_OUT塊的Fault信號輸出到MotSpdCL的TRIP信號,, 當(dāng)變頻器有故障時,馬達(dá)塊能停機(jī)并在之后確認(rèn)故障,,注意需要在Trip引腳處取反,,因為Trip是=1時表示正常;
- Zsw1_14是變頻器一個狀態(tài)字的bit14,,表示變頻器的正反轉(zhuǎn)反饋信號,,等于1時表示正轉(zhuǎn),等于0時表示反轉(zhuǎn),通過與OP_EN(操作始能信號)相“與"后,, 做為正反轉(zhuǎn)的反饋信號,,連接到MotSpdCL塊的FbkFwd和FbkRev。
2.4.4 馬達(dá)塊和變頻器的速度匹配
在工業(yè)現(xiàn)場往往需要用到齒輪箱進(jìn)行減速,,以獲得更大的扭矩,,本文假定齒輪箱的減速比為10,如下圖所示:
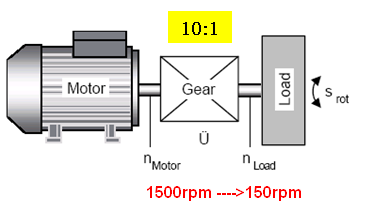
圖2-11 現(xiàn)場的應(yīng)用模型
生產(chǎn)中用戶更關(guān)心的是實際設(shè)備轉(zhuǎn)速或者線速度,,如泵,、導(dǎo)絲盤的軸速,而不是電機(jī)的軸速,,如何實現(xiàn)畫面上直接設(shè)定設(shè)備轉(zhuǎn)速呢,?
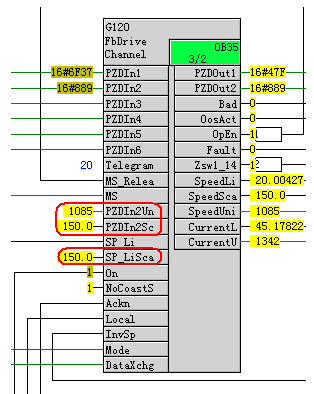
系統(tǒng)在Drive塊提供了SP_LiScale這個參數(shù)來進(jìn)行量程的轉(zhuǎn)換,它對應(yīng)的是負(fù)載在變頻器輸出頻率時的負(fù)載速度,,馬達(dá)塊送來的給定值通過它折算后,,變成0-16384 的整數(shù)值給變頻器,反之亦然,,變頻器送來的第二個狀態(tài)字折算后送馬達(dá)塊顯示,,下面具體介紹如下:
(1) 速度反饋:
SpeedLi是經(jīng)過轉(zhuǎn)換后的速度反饋信號,它的轉(zhuǎn)換公式是:
SpeedLi =(PZDIn2* SP_LiScale)/16384 ,,
(2) 速度給定:
FbDrive塊的SP_Li引腳接收馬達(dá)塊的給定信號,,折算成對應(yīng)的速度給定值后通過PZDOut2引腳輸出到變頻器,公式如下:
PZDOut2=(SP_Li* SP_LiScale)/16384
在本例里變頻器頻率設(shè)置為50Hz,, 對應(yīng)電機(jī)的軸頭速度為1500rpm,,經(jīng)Gear減速后得到負(fù)載的轉(zhuǎn)速為150rpm/min, 在馬達(dá)的設(shè)定值面板里設(shè)定的是負(fù)載的轉(zhuǎn)速,,而不是馬達(dá)的速度,,為此,需要在FbDrive塊里設(shè)定好參數(shù),,以保證負(fù)載的實際轉(zhuǎn)速與面板設(shè)定的相等,。
在本例中,齒輪箱的減速比為10,,變頻器側(cè)設(shè)置50Hz為頻率,,對應(yīng)的馬達(dá)轉(zhuǎn)速為1500rpm/Min,經(jīng)過齒輪箱減速后負(fù)載轉(zhuǎn)速為150rpm/min,, 所以SpeedLi應(yīng)設(shè)置為150,,如下圖所示:
 您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)















