 您好, 歡迎來到化工儀器網
您好, 歡迎來到化工儀器網










| 應用領域 | 化工,電子/電池,電氣 | 產地 | 德國 |
|---|---|---|---|
| 品牌 | 西門子 |
MotionTasks 用于運動序列。
同一MotionTask中,,指令序列通常連續(xù)執(zhí)行,例如,,下一指令僅在當前指令完成時才開始,。
在這些等待時間期間,MotionTasks 不需要任何 CPU 時間,,但會在接收到等待事件時立即做出響應,。
同步任務
在伺服同步用戶任務中,可在伺服級實現(xiàn)對時間要求嚴格的終端-終端 I/O 響應,,或快速影響整定值
 |
| 參考價 | ¥670 |
| 訂貨量 | 1臺 |
更新時間:2022-11-11 16:52:07瀏覽次數(shù):550
聯(lián)系我們時請說明是化工儀器網上看到的信息,,謝謝!
 |
 |
|
|
 |
西門子模塊6AV2123-2MB03-0AX0
輔助工藝功能
該技術功能包中的工藝對象功能可通過附加語言命令和系統(tǒng)變量以及符合 PLCopen 的函數(shù)塊來訪問,。因此,運動順序的編程較為簡單且集成程度較高,。
溫度控制工藝功能包 (TControl)
SIMOTION 溫度控制工藝功能包提供了功能豐富的溫度通道,。這些功能同樣通過附加語言命令和系統(tǒng)變量進行訪問。
傳動控制圖 (DCC) 工藝功能包
SIMOTION 傳動控制圖 (DCC) 工藝功能包提供了一個“驅動控制塊"(DCB) 庫,。借助這些控制塊,,可以在選配的 DCC 編輯器中以圖形化的方式配置開環(huán)和閉環(huán)控制功能,該編輯器可集成到 SCOUT,。SCOUT TIA(TIA Portal 中的 SIMOTION)沒有 DCC,。
多功能信息接口 (MIIF) 工藝功能包
SIMOTION MIIF 工藝功能包可充當服務器,支持以符號化方式訪問 SIMOTION 數(shù)據(jù)并通過以太網將數(shù)據(jù)提供給客戶端(例如,,操作面板),。
SIMOTION I/O 交互功能庫
這些功能庫包含用于集成智能 I/O 和通信模塊的標準功能。它們是 SCOUT 命令庫的組成部分,,可非常方便地將模塊(如 FM 350-1/-2,、FM 352、CP 340/341,、SIWAREX FTA)或識別系統(tǒng)集成到 SIMOTION 用戶程序中,。SIMOTION Utilities & Applications 中也提供了編程示例和標準應用。The SIMOTION Utilities & Applications 隨 SCOUT 免費提供,。
SIMOTION運動控制系統(tǒng)采用了高性能的CPU,,該CPU上具備了一個適合于快速控制過程的實時的操作系統(tǒng),。
這種實時操作系統(tǒng)可對包含不同執(zhí)行層次的執(zhí)行系統(tǒng)進行組織。
執(zhí)行系統(tǒng)
SIMOTION 執(zhí)行系統(tǒng)會區(qū)分系統(tǒng)執(zhí)行層和用戶執(zhí)行層(任務):
對系統(tǒng)進行總體操作所需的系統(tǒng)任務處理操作,。通過工藝對象,,將在 SERVO、IPO 和 IPO2 系統(tǒng)任務中執(zhí)行閉環(huán)位置控制和特性參數(shù)計算,。
系統(tǒng)會定期執(zhí)行系統(tǒng)任務,。可以系統(tǒng)循環(huán)時鐘,。
具有不同執(zhí)行特性的執(zhí)行層可用于與任務有關的用戶編程(用戶程序任務),。
執(zhí)行層定義了執(zhí)行系統(tǒng)中程序的時間順序。每個執(zhí)行層都包含一個或多個任務,。具體用戶程序分配給這些任務,。
所有程序(因而所有任務)都可執(zhí)行 PLC、工藝和運動控制任務,。
任務相關執(zhí)行的任務類型為:
同步任務
循環(huán)任務
順序任務
時間觸發(fā)的任務,,以及
中斷驅動的任務
同步任務與系統(tǒng)任務以及變頻器的控制循環(huán)或等時同步 PROFIBUS/PROFINET 平行運行。
借助于這些同步任務,,整個應用處于等時同步模式下(應用程序 ? 驅動器 ? I/O),。其結果是反應時間短,并且該應用易于復寫,。
應用程序具有以下執(zhí)行層:
啟動任務
一旦操作模式從停止過渡到運行,,StartupTask立即執(zhí)行,控制系統(tǒng)啟動,。
背景任務
BackgroundTask是循環(huán)執(zhí)行的,,并應用于一般的PLC任務。周期時間監(jiān)控檢測BackgroundTask的大處理時間,。BackgroundTask 相當于 SIMATIC 控制系統(tǒng)的 OB1,。
運動任務
MotionTasks 用于運動序列。
同一MotionTask中,,指令序列通常連續(xù)執(zhí)行,,例如,下一指令僅在當前指令完成時才開始,。
在這些等待時間期間,,MotionTasks 不需要任何 CPU 時間,但會在接收到等待事件時立即做出響應,。
同步任務
在伺服同步用戶任務中,,可在伺服級實現(xiàn)對時間要求嚴格的終端-終端 I/O 響應,或快速影響整定值(與技術功能對象(如位置控制器)的系統(tǒng)循環(huán) SERVO 同步),。
IPO 同步用戶任務在插補循環(huán) IPO 或減速循環(huán) IPO2 前可即時同步開始執(zhí)行,。
可實現(xiàn)快速的運動控制反應以及閉環(huán)控制任務,,這些閉環(huán)控制任務中,實際值的度和設點的輸出必須同步,。
技術功能對象的參考變量在系統(tǒng)循環(huán) IPO 和 IPO2 中進行計算,。
因此,用戶程序與驅動的控制周期和I/O的處理同步,。同步確保了短反應時間,,尤其是確定性的、可重現(xiàn)的機器行為,。
DCC 任務
驅動控制圖(選項)采用上述的同步任務,。此外,能在各個塊上分配更高的同步執(zhí)行水平(DCC的特殊任務),。
中斷任務
有幾個時間控制任務,。呼叫周期是參數(shù)化的。定期執(zhí)行的任務通常放在此處,。
搣中斷任務攠
InterruptTasks 用于快速響應利用中斷發(fā)出信號的內部事件。InterruptTasks 可由系統(tǒng)中斷(如報警和超時)激活,,或由用戶中斷激活,。
關機任務
當過渡到停止模式時,調用ShutdownTask,??稍诖颂幎x轉換到此系統(tǒng)狀態(tài)的特定行為。
所有任務都可有一套完整的指令,。例如,,可在當前定位指令上添加另一運動,它是來自由用戶中斷任務觸發(fā)的MotionTask:
SIMOTION應用的任務結構
西門子模塊6AV2123-2MB03-0AX0
絕對式編碼器碼盤
絕對式編碼器的特點是不需要計數(shù)器,,在轉軸的任意位置都可讀出一個固定的與位置相對應的數(shù)字碼,,即直接讀出角度坐標的絕對值。另外,,相對于增量式編碼器,,絕對式編碼器不存在累積誤差,并且當電源切除后位置信息也不會丟失,。
一般情況下,,從編碼器的光電檢測器件獲取的信號電平較低,波形也不規(guī)則,,不能直接用于控制,、信號處理和遠距離傳輸,所以在編碼器內還需要對信號進行放大,、整形等處理,。經過處理的輸出信號一般近似于正弦波或矩形波,,因為矩形波輸出信號容易進行數(shù)字處理,所以在控制系統(tǒng)中應用比較廣泛,。
增量式光電編碼器的信號輸出有集電極開路輸出,、電壓輸出、線驅動輸出和推挽式輸出等多種信號形式,。
集電極開路輸出是以輸出電路的晶體管發(fā)射極作為公共端,,并且集電極懸空的輸出電路。根據(jù)使用的晶體管類型不同,,可以分為NPN集電極開路輸出(也稱作漏型輸出,,當邏輯 1 時輸出電壓為 0V,如圖2-1所示)和PNP集電極開路輸出(也稱作源型輸出,,當邏輯 1 時,,輸出電壓為電源電壓,如圖2-2所示)兩種形式,。在編碼器供電電壓和信號接受裝置的電壓不一致的情況下可以使用這種類型的輸出電路,。
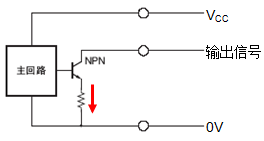
圖2-1 NPN 集電極開路輸出
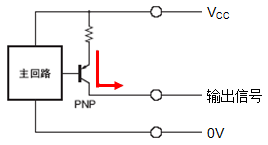
圖2-2 PNP集電極開路輸出
對于PNP型的集電極開路輸出的編碼器信號,可以接入到漏型輸入的模塊中,,具體的接線原理如圖2-3所示,。
注意:PNP型的集電極開路輸出的編碼器信號不能直接接入源型輸入的模塊中。
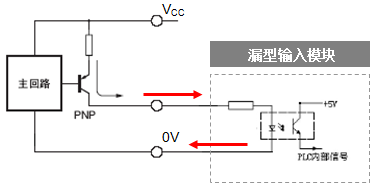
圖2-3 PNP型輸出的接線原理
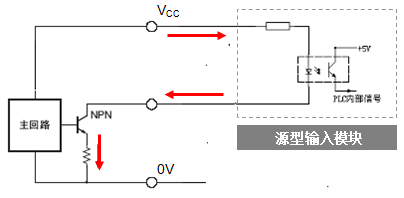
對于NPN型的集電極開路輸出的編碼器信號,,可以接入到源型輸入的模塊中,,具體的接線原理如圖2-4所示。
注意:NPN型的集電極開路輸出的編碼器信號不能直接接入漏型輸入的模塊中,。
 西門子EM AM06模塊
西門子EM AM06模塊
圖2-4 NPN型輸出的接線原理
電壓輸出是在集電極開路輸出電路的基礎上,,在電源和集電極之間接了一個上拉電阻,這樣就使得集電極和電源之間能有了一個穩(wěn)定的電壓狀態(tài),,如圖2-5,。一般在編碼器供電電壓和信號接受裝置的電壓一致的情況下使用這種類型的輸出電路。
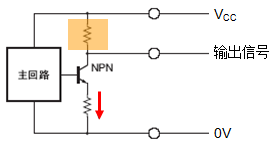
圖2-5 電壓輸出型
推挽式輸出方式由兩個分別為 PNP 型和 NPN 型的三極管組成,,如圖2-6所示,。當其中一個三極管導通時,另外一個三極管則關斷,,兩個輸出晶體管交互進行動作,。
這種輸出形式具有高輸入阻抗和低輸出阻抗,因此在低阻抗情況下它也可以提供大范圍的電源,。由于輸入,、輸出信號相位相同且頻率范圍寬,因此它還適用于長距離傳輸,。
推挽式輸出電路可以直接與 NPN 和 PNP 集電極開路輸入的電路連接,,即可以接入源型或漏型輸入的模塊中