李婧婧
安科瑞電氣股份有限公司
摘要:針對(duì)傳統(tǒng)使用VIX總線采集電動(dòng)汽車并行數(shù)據(jù)方法的不足之處,提出依托WSN監(jiān)控的并行數(shù)據(jù)采集系統(tǒng)設(shè)計(jì)方式,。在深入分析電動(dòng)汽車充電樁傳感器節(jié)點(diǎn)分布狀況基礎(chǔ)上,,對(duì)電動(dòng)汽車路面節(jié)點(diǎn)分布定位實(shí)施融合處理,通過(guò)WSN監(jiān)控法構(gòu)建并向數(shù)據(jù)信心傳輸信道模型,并借助DSP數(shù)字處理芯片對(duì)系統(tǒng)硬件電路展開設(shè)計(jì),。經(jīng)仿真實(shí)驗(yàn)證實(shí),所用系統(tǒng)采集的并行數(shù)據(jù)準(zhǔn)確率較高,,能夠?qū)嵤┎杉妱?dòng)汽車運(yùn)行狀態(tài)數(shù)據(jù)并實(shí)施融合處理,,提升對(duì)這類汽車實(shí)際運(yùn)行時(shí)的監(jiān)控及管理能力。
關(guān)鍵詞:WSN監(jiān)控,;電動(dòng)汽車,;并行數(shù)據(jù)采集;設(shè)計(jì)
引言
隨著能源及環(huán)境問(wèn)題日益嚴(yán)峻,,傳統(tǒng)需要燃油的汽車引起更多人的擔(dān)憂,。因電動(dòng)汽車展現(xiàn)出環(huán)保、節(jié)能等特征,,越來(lái)越多國(guó)家將目光瞄準(zhǔn)電動(dòng)汽車,,期望通過(guò)電動(dòng)汽車改善環(huán)境污染、降低對(duì)于石油的依賴,。電動(dòng)汽車就是以燃料電池為動(dòng)力電源的一種汽車,,所用電池化學(xué)反應(yīng)中不會(huì)出現(xiàn)有害產(chǎn)物,且支持采用充電的方法補(bǔ)充能量,。從環(huán)境保護(hù)及節(jié)約能源視角分析,,電動(dòng)汽車作為理想狀態(tài)下的車輛,具有良好的應(yīng)用前景,。但電動(dòng)汽車充電問(wèn)題方面的研究依然不夠成熟,,因充電站及充電樁的顯著,如何迅速定位及搜索充電站,,成為促進(jìn)電動(dòng)汽車發(fā)展的重要依據(jù),。通過(guò)采集電動(dòng)汽車運(yùn)行條件下的并行數(shù)據(jù),迅速定位,、搜索電動(dòng)汽車充電樁及充電站,,成為有效解決電動(dòng)汽車發(fā)展的熱點(diǎn)問(wèn)題。有學(xué)者研究指出,,依托LLC諧振逆變控制的電動(dòng)汽車處于運(yùn)行條件下采集并行數(shù)據(jù),,并利用AD7656-1AD轉(zhuǎn)換芯片提取節(jié)能控制特征,,但這種方法會(huì)使得控制環(huán)節(jié)發(fā)生耦合失真的情況,不具有良好的數(shù)據(jù)采集性能,。針對(duì)以上問(wèn)題,,本研究提出基于WSN監(jiān)控設(shè)計(jì)電動(dòng)汽車并行數(shù)據(jù)采集系統(tǒng)設(shè)計(jì)方式。
一,、設(shè)計(jì)電動(dòng)汽車傳感器節(jié)點(diǎn)分布模型
電動(dòng)汽車實(shí)際行駛過(guò)程中,,由于受到供電情況等問(wèn)題的限制,需要對(duì)汽車運(yùn)行環(huán)節(jié)的數(shù)據(jù)展開實(shí)時(shí)采集,。本研究使用WSN傳感器網(wǎng)絡(luò)監(jiān)控模型,,通過(guò)中間件技術(shù)完成對(duì)于電動(dòng)汽車充電站網(wǎng)絡(luò)異構(gòu)數(shù)據(jù)的融合,以此合理分布電動(dòng)汽車傳感器網(wǎng)絡(luò)節(jié)點(diǎn),,并利用物聯(lián)網(wǎng)及WSN分布技術(shù)將電動(dòng)汽車組成相應(yīng)地車載傳感器網(wǎng)絡(luò),,從而實(shí)現(xiàn)實(shí)時(shí)監(jiān)控,所設(shè)計(jì)的模型如圖1所示,。
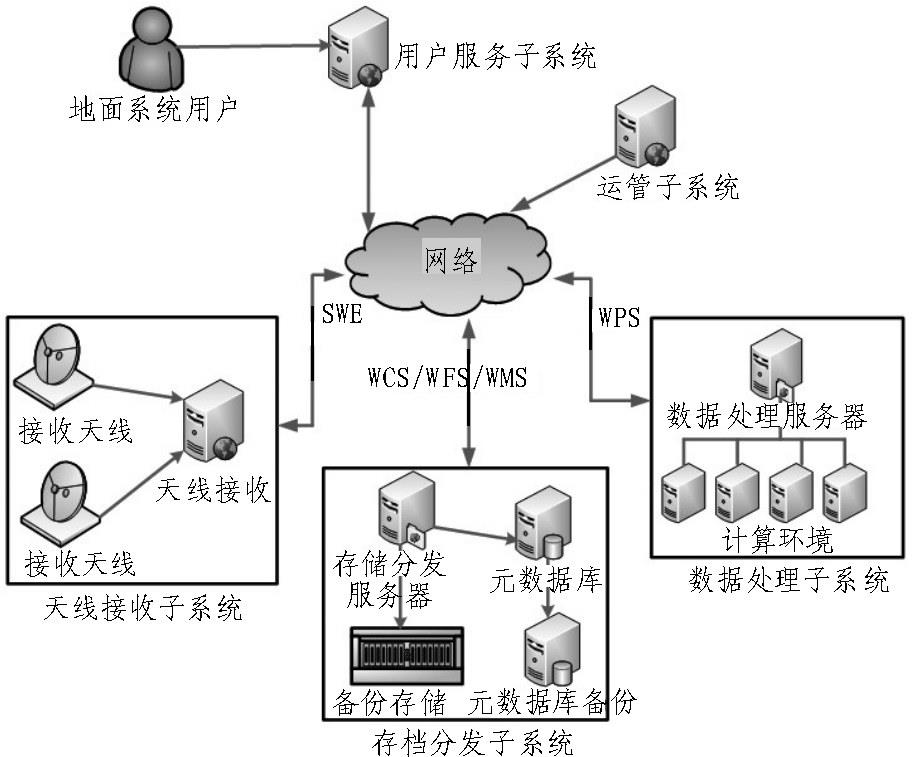
圖1構(gòu)建電動(dòng)汽車WSN網(wǎng)絡(luò)模型結(jié)構(gòu)
二,、系統(tǒng)融合算法及硬件設(shè)計(jì)
1、融合算法分析
基于WSN監(jiān)控對(duì)電動(dòng)汽車并行數(shù)據(jù)進(jìn)行分發(fā)及采集操作,,WSN尾節(jié)點(diǎn)接收后方頭節(jié)點(diǎn)數(shù)據(jù)時(shí),,采用車輛不同節(jié)點(diǎn)之間的交互性評(píng)估車載多信道情況,車輛節(jié)點(diǎn)運(yùn)用射頻識(shí)別技術(shù)完成數(shù)據(jù)狀態(tài)收發(fā),,并實(shí)施傳輸,。獲得相應(yīng)地迭代方程:

其中,Rn表示發(fā)送信標(biāo)信息后需考慮當(dāng)前網(wǎng)絡(luò)狀態(tài)參數(shù),,若在T時(shí)間對(duì)電動(dòng)汽車狀態(tài)進(jìn)行檢測(cè),,其閥值Rn比Rmax小,接收到前方車輛鄰居節(jié)點(diǎn)信道列表之內(nèi)的總線信心,,以此加大電動(dòng)汽車功率消耗,,獲取閑置條件下電動(dòng)汽車功耗是Rn,Rn求解公式為:
明確車輛節(jié)點(diǎn)射頻接口后,,采用并行動(dòng)態(tài)跟蹤法對(duì)電動(dòng)汽車的射頻接口實(shí)施融合處理,,并在位置未改變的前提下,獲得其自適應(yīng)迭代步長(zhǎng)求解公式:

以上式子中,,σ2x1(k)代表第k次迭代信道處于繁忙的狀態(tài)時(shí)間,,x1(k)表示電動(dòng)汽車并向數(shù)據(jù)所提取的特征結(jié)果,根據(jù)以上分析,,獲得電動(dòng)汽車并行數(shù)學(xué)采集系統(tǒng)結(jié)構(gòu)模型,,如圖2所示
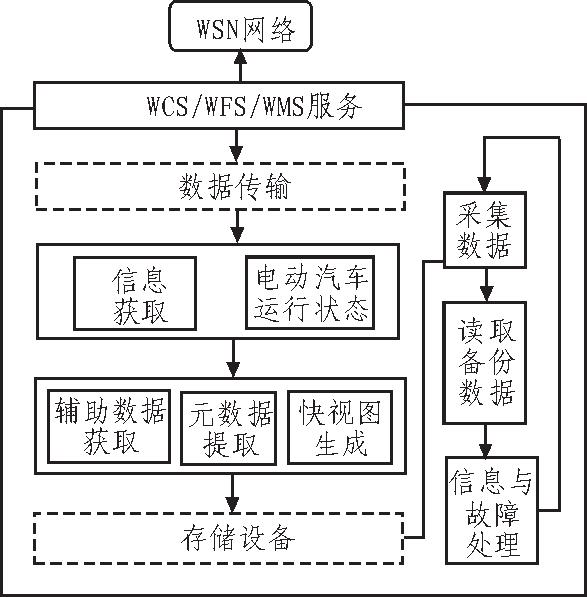
圖2電動(dòng)汽車并行數(shù)據(jù)采集系統(tǒng)設(shè)計(jì)
根據(jù)上述系統(tǒng)設(shè)計(jì),通過(guò)HPE1433A建立與之對(duì)應(yīng)的整流二級(jí)管輸入電壓調(diào)節(jié)系統(tǒng),x,、y軸方向的陣元間距分別設(shè)置為dx,、dy,,每一個(gè)HPE1433A均有TTL電平外部觸發(fā)輸入,,獲取相應(yīng)地觸發(fā)電平功率補(bǔ)償增益:
利用較小方差估算,順利完成對(duì)于系統(tǒng)并向采集線圈的死鎖邏輯控制,,并測(cè)定每一個(gè)傳感器陣元,,對(duì)于所輸出Xi(t)依次加權(quán)ωi(θ),依托求方差獲得控制電路輸出的v(t,θ),,即:
2,、系統(tǒng)硬件設(shè)計(jì)
傳統(tǒng)利用VIX總線采集方式獲取電動(dòng)汽車并行數(shù)據(jù),由于電動(dòng)汽車分布空間和節(jié)點(diǎn)不斷增加,,并行總線上容易發(fā)生數(shù)據(jù)擁堵的情況,,引起監(jiān)測(cè)性能不良[5-8]。為有效克服傳統(tǒng)方式的不足之處,,本研究依托WSN監(jiān)控提出電動(dòng)汽車并行數(shù)據(jù)采集系統(tǒng)設(shè)計(jì)方式,。通過(guò)這種方法雕制并行數(shù)據(jù)信息傳輸信道模型,獲得相應(yīng)地?cái)?shù)據(jù)調(diào)制過(guò)程,,如圖3所示,。
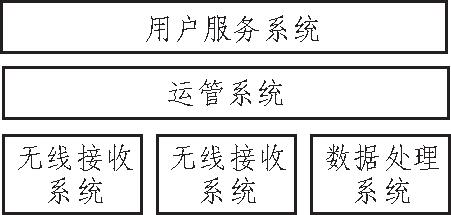
圖3調(diào)制并行數(shù)據(jù)信息傳輸信道模型效果
基于此,,利用DSP數(shù)字處理芯片對(duì)系統(tǒng)硬件電路展開設(shè)計(jì)。所設(shè)計(jì)的電動(dòng)汽車并行數(shù)據(jù)采集系統(tǒng)均運(yùn)用電壓信號(hào)合理控制D/A電路,,通過(guò)DSP數(shù)字信號(hào)處理芯片完成系統(tǒng)的主控電路設(shè)計(jì),,AD554芯片所輸出的較大范圍是±15V[9-11]。對(duì)系統(tǒng)進(jìn)行設(shè)計(jì)時(shí),,D/A電路采用AD5545、AD8674,,獲得所采集的并行數(shù)據(jù),。
電動(dòng)汽車充電線路中的磁場(chǎng)分布位置。通過(guò)兩個(gè)PI控制器完成電流波形整流控制,,獲得系統(tǒng)輸出阻抗及諧振角頻率:
此時(shí),,WSN監(jiān)控節(jié)點(diǎn)設(shè)定的供電范圍是5~15V,,AD5545兩路輸出利用運(yùn)放AD8674展開數(shù)模轉(zhuǎn)換,更好地模擬電源,、地間增加10uF電容對(duì)系統(tǒng)實(shí)施去耦,、濾波處理[13-15]。根據(jù)2.5V電壓基準(zhǔn),,AD5545數(shù)字接口利用電容實(shí)現(xiàn)交流耦合,獲得輸出電壓:

假定V表示耦合電容C的直流偏置,,依托對(duì)偏差補(bǔ)償進(jìn)行測(cè)量,,能有效提升數(shù)據(jù)采集可靠性。
三,、系統(tǒng)測(cè)試與性能分析
系統(tǒng)要把采集的并行數(shù)據(jù)到計(jì)算機(jī)中,并對(duì)其開展合理的組織,,構(gòu)建完整的電動(dòng)汽車并行數(shù)據(jù)采集系統(tǒng)。采用不同傳感器,、變換器測(cè)量不同的數(shù)據(jù),將其轉(zhuǎn)換為電信號(hào),。計(jì)算機(jī)依托數(shù)據(jù)采集卡獲取相應(yīng)的數(shù)據(jù),并重視保存數(shù)據(jù),,并將結(jié)果表示為便于理解的方法表達(dá)出來(lái),,如圖4所示。
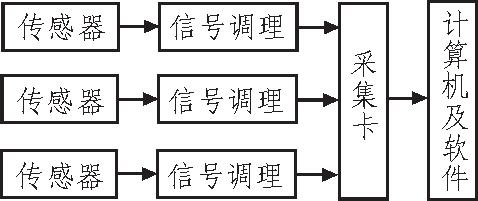
圖4數(shù)據(jù)采集系統(tǒng)構(gòu)成框圖
四,、安科瑞充電樁運(yùn)營(yíng)管理平臺(tái)
1,、系統(tǒng)架構(gòu)
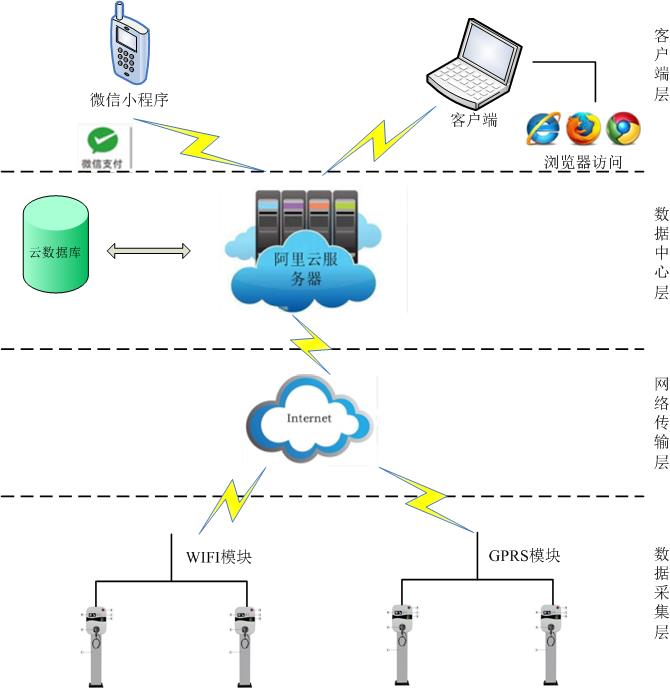
安科瑞Acrelcloud-充電樁收費(fèi)運(yùn)營(yíng)云平臺(tái)系統(tǒng)通過(guò)物聯(lián)網(wǎng)技術(shù)對(duì)接入系統(tǒng)的充電樁站點(diǎn)和各個(gè)充電樁進(jìn)行不間斷地?cái)?shù)據(jù)采集和監(jiān)控,同時(shí)對(duì)各類故障如充電機(jī)過(guò)溫保護(hù),、充電機(jī)輸入輸出過(guò)壓、欠壓、絕緣檢測(cè)故障等一系列故障進(jìn)行預(yù)警,;yong戶通過(guò)微信小程序掃描二維碼,進(jìn)行支付后,,系統(tǒng)發(fā)起充電請(qǐng)求,控制二維碼對(duì)應(yīng)的充電樁完成電動(dòng)汽車的充電過(guò)程,。
充電樁可選配WIFI模塊或GPRS模塊接入互聯(lián)網(wǎng),,配合加密技術(shù)和秘鑰分發(fā)技術(shù),基于TCP/IP的數(shù)據(jù)交互協(xié)議,,與云端進(jìn)行直連。云平臺(tái)包含了充電收費(fèi)和充電樁運(yùn)營(yíng)的所有功能,,具體功能如下:
資源管理:充電站檔案管理,,充電樁檔案管理,,用戶檔案管理,充電樁運(yùn)行監(jiān)測(cè),,充電樁異常交易監(jiān)測(cè)。
交易結(jié)算:充電價(jià)格策略管理,,預(yù)收費(fèi)管理,賬單管理,,營(yíng)收和財(cái)務(wù)相關(guān)報(bào)表
用戶管理:用戶注冊(cè),用戶登錄,,用戶帳戶管理,,消息管理
充電服務(wù):充電設(shè)施搜索,,充電設(shè)施查看,地圖尋址,在線自助支付充電,,充電結(jié)算,,導(dǎo)航等
微信小程序:掃碼充電,,賬單支付等功能
數(shù)據(jù)服務(wù):數(shù)據(jù)采集,短信提醒,,數(shù)據(jù)存儲(chǔ)和解析
變壓器監(jiān)控:監(jiān)控充電站變壓器負(fù)荷,,每個(gè)充電站配備一塊ARCM300T無(wú)線表,超負(fù)荷時(shí)系統(tǒng)自動(dòng)對(duì)充電樁的進(jìn)行調(diào)度管理,,即當(dāng)負(fù)荷超過(guò)百分之五十時(shí),,系統(tǒng)會(huì)限制新增開始充電的充電樁的功率,降為百分之五十,,當(dāng)變壓器負(fù)荷超過(guò)百分之八十時(shí),,系統(tǒng)將不允許新增充電樁開始充電,直到負(fù)荷下降為止,。
2,、平臺(tái)功能
2.1平臺(tái)登錄
在瀏覽器打開云平臺(tái)鏈接、輸入賬戶名和權(quán)限密碼,,進(jìn)行登錄,,防止未授權(quán)人員瀏覽有關(guān)信息,。

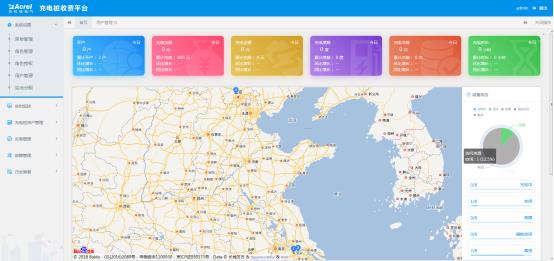
2.2平臺(tái)首頁(yè)
平臺(tái)首頁(yè)總覽每天的開戶數(shù)、充值金額,、充電金額、充電度數(shù),、充電次數(shù),、充電時(shí)長(zhǎng),,累計(jì)的開戶數(shù),、充值金額,、充電金額,、充電度數(shù),、充電次數(shù),、充電時(shí)長(zhǎng),,以及相應(yīng)的環(huán)比增長(zhǎng)和同比增長(zhǎng)以及樁,、站分布地圖導(dǎo)航,、本月充電統(tǒng)計(jì),。
2.3實(shí)時(shí)監(jiān)控
l 充電站監(jiān)控
充電站監(jiān)控頁(yè)面監(jiān)視用戶充電槍總數(shù),、正在充電的槍數(shù)、空閑槍數(shù),、插槍數(shù)量,、故障槍數(shù)量等,匯總了用戶擁有各樁的當(dāng)日充電總次數(shù),、總電量,、總時(shí)長(zhǎng),,進(jìn)行負(fù)荷限制,、故障查詢。

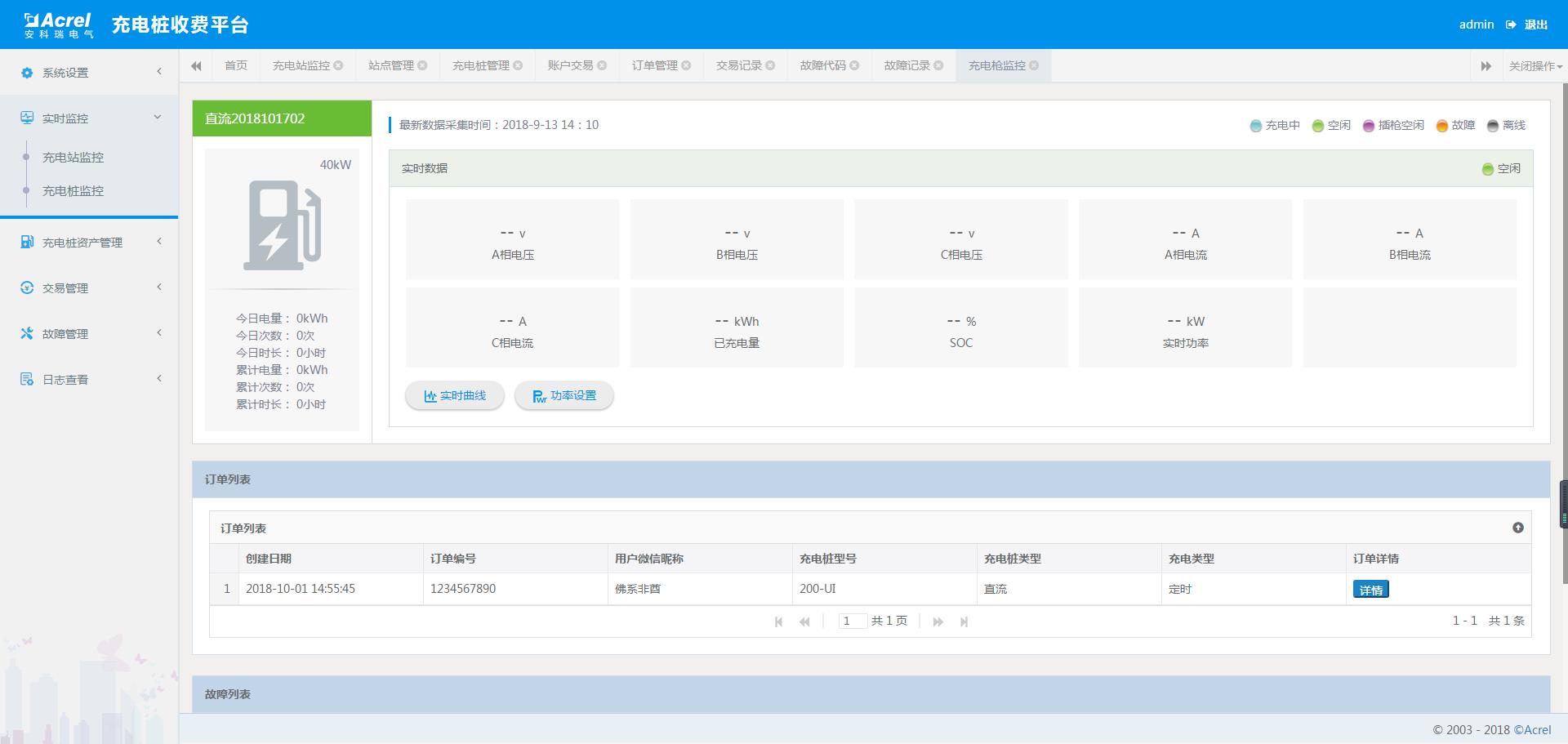
l 充電槍監(jiān)控
充電樁監(jiān)控頁(yè)面充電槍的基本信息,、今日充電電量,、今日充電次數(shù)、今日充電時(shí)長(zhǎng)和累計(jì)充電電量,、累計(jì)充電次數(shù),、累計(jì)充電時(shí)長(zhǎng)等、充電電壓電流等參數(shù),。
2.4微信小程序
l 搜索與使用
微信小程序可以通過(guò)掃描二維碼和微信文字搜索找到,,點(diǎn)擊后可以加入到小程序列表,如下圖所示


l 授權(quán)登錄界面
用戶通過(guò)搜索或者掃碼等途徑初次打開小程序時(shí),,會(huì)進(jìn)入這個(gè)頁(yè)面,,需要用戶授權(quán)登錄才可以進(jìn)入小程序主功能頁(yè)面,如圖所示:


l 主功能頁(yè)
初次進(jìn)入主功能頁(yè)時(shí)需要授權(quán)定位才可以使用地圖相關(guān)功能,,在地圖上查看到當(dāng)前所在區(qū)域的充電站,,查看充電站信息,可以進(jìn)行掃碼充電操作,,地圖導(dǎo)航等,。


l 充電
掃描充電槍上的二維碼,,如果當(dāng)前充電樁可用即可進(jìn)入充電選擇頁(yè)面,可以查看到當(dāng)前的充電站名稱,、充電槍名稱,,以及當(dāng)前的賬戶余額,電價(jià)和預(yù)計(jì)可充電量等數(shù)據(jù),,還可以查看當(dāng)前賬戶的歷史充電記錄,。充電方式分為按時(shí)間充電、按金額充電,、按電量充電這三種方式,。充電結(jié)束可以進(jìn)進(jìn)行評(píng)價(jià)。



l 個(gè)人信息
個(gè)人信息可以顯示當(dāng)前登錄賬號(hào)的昵稱和余額,,同時(shí)包括,、充值、充值記錄查詢,、賬單查詢,、充電記錄查詢、設(shè)置支付密碼等功能



3,、硬件配置
3.1平臺(tái)服務(wù)器:建議按照我方推薦配置購(gòu)買,,或者客戶自己租用阿里云資源。
推薦硬件配置清單:(如申請(qǐng)阿里云可忽略)

若客戶自己租用阿里云服務(wù)器,,服務(wù)器配置根據(jù)充電槍點(diǎn)數(shù)的不同,,分別如下:
3.2現(xiàn)場(chǎng)推薦硬件配置清單:

五、結(jié)束語(yǔ)
本研究中針對(duì)WSN節(jié)點(diǎn)監(jiān)控技術(shù),,提出基于這一監(jiān)控技術(shù)的電動(dòng)汽車并行數(shù)據(jù)采集系統(tǒng)設(shè)計(jì),,在概述系統(tǒng)的傳感器節(jié)點(diǎn)分布模型基礎(chǔ)上,詳細(xì)介紹系統(tǒng)融合算法及硬件設(shè)計(jì),。此外,,對(duì)系統(tǒng)的性能展開測(cè)試,研究結(jié)果表明,,使用該系統(tǒng)采集電動(dòng)汽車并行數(shù)據(jù)準(zhǔn)確度較高,,且具有良好的融合處理能力,對(duì)于提升電動(dòng)汽車運(yùn)行狀態(tài)管理能力發(fā)揮著重要的作用,。
參考文獻(xiàn)
[1] 劉瑩,,周喜平.基于WSN監(jiān)控的電動(dòng)汽車并行數(shù)據(jù)采集系統(tǒng)設(shè)計(jì)[J].科技通報(bào),2016,,32(6):205-208,,218.
[2] 李進(jìn)忠,李銀蘋,,史張宇.基于WSN監(jiān)控的電動(dòng)汽車并行數(shù)據(jù)采集系統(tǒng)設(shè)計(jì)與研究
[3] 安科瑞企業(yè)微電網(wǎng)設(shè)計(jì)與應(yīng)用手冊(cè).2020.06版
作者簡(jiǎn)介:李婧婧,,女,,本科 安科瑞電氣股份有限公司,主要研究方向?yàn)橹悄茈娋W(wǎng)供配電



