目錄:密朗德儀器科技(江蘇)有限公司>>儀器儀表>>三坐標>> 關節(jié)臂三坐標










| 產地類別 | 國產 | 產品種類 | 關節(jié)臂式 |
|---|---|---|---|
| 工作方式 | 便攜式 | 工作原理 | 手動型 |
| 價格區(qū)間 | 10萬-20萬 | 應用領域 | 道路/軌道/船舶,包裝/造紙/印刷,鋼鐵/金屬,汽車及零部件,綜合 |
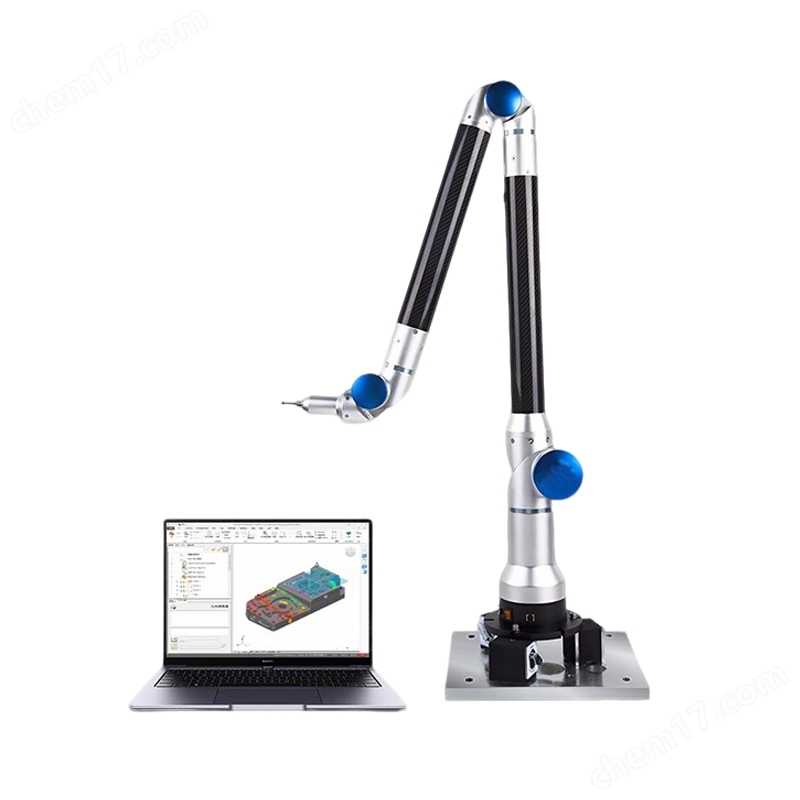
關節(jié)臂三坐標 組成如圖2-1系統(tǒng)組成圖,,工作時由1—固定平臺、2—磁性表座(或吸盤,、三腳架),、3—測量機主機、4—電腦及軟件,、5—測頭幾部分組成,。測量時必須穩(wěn)定固定在平臺上(不要求水平但要求整個測量過程保持測量機及被測工件的相對位置穩(wěn)定),測量機主機通過吸盤或螺釘固定,,便攜式計算機通過USB信號線連接主機,,軟件完成測量數據采集和處理并生產測量報告。
關節(jié)臂三坐標 組成如圖2-1系統(tǒng)組成圖,,工作時由1—固定平臺,、2—磁性表座(或吸盤、三腳架),、3—測量機主機,、4—電腦及軟件、5—測頭幾部分組成,。測量時必須穩(wěn)定固定在平臺上(不要求水平但要求整個測量過程保持測量機及被測工件的相對位置穩(wěn)定),,測量機主機通過吸盤或螺釘固定,便攜式計算機通過USB信號線連接主機,,軟件完成測量數據采集和處理并生產測量報告,。
量機由三根剛體臂、六個活動關節(jié)和一個測頭組成,。三根臂相互連接,,其中一個為固定臂,它安裝在任意基座上,,以支撐測量機所有部件,,另外兩個活動臂可運動于空間任意位置,以適應測量需要,,其中一個為中間臂,,一個為末端臂并在此尾端安裝測頭。第一根固定臂與第二根中間臂之間、第二根與第三根末端臂之間,、第三根與接觸測頭之間均為關節(jié)式連接,,可作空間回轉,而每個活動關節(jié)裝有相互垂直的回轉角傳感器,,可測量各個臂和測頭在空間的位置,。每個關節(jié)的回轉中心和相應的活動臂構成一個極坐標系統(tǒng),回轉角即極角由傳感器測量,,而活動臂兩端關節(jié)回轉中心距離為極坐標的極徑長度,,可見該測量系統(tǒng)是由三個串連的極坐標系統(tǒng)組成,當測頭與被測件接觸時,,測量系統(tǒng)可給出測頭在空間的三維位置信息,,測頭與被測件在不同部位接觸時,根據所建立的測量數學模型,,由計算機給出被測參數實際值,。


 1
1


 化工儀器網
化工儀器網