6ES7313-5BG04-0AB0詳細(xì)說明
SIMATIC S7-1500 中集成有診斷功能,無需再進(jìn)行額外編程,。統(tǒng)一的顯示機(jī)制可將故障信息以文本方式顯示在TIA博途,、HMI、Web server和CPU 的顯示屏上,。
一鍵生成診斷信息
只需簡(jiǎn)單一擊,,無需額外編程操作,既可生成系統(tǒng)診斷信息,。整個(gè)系統(tǒng)中集成有包含軟硬件在內(nèi)的所有診斷信息,。
統(tǒng)一的顯示機(jī)制
無論是在本地還是通過Web 遠(yuǎn)程訪問,文本信息和診斷信息的顯示都*相同,,從而確保所有層級(jí)上的投資安全,。
接線端子/ LED 標(biāo)簽的1:1 分配
在測(cè)試、調(diào)試,、診斷和操作過程中,,通過對(duì)端子和標(biāo)簽進(jìn)行快速便捷的顯示分配,節(jié)省了大量操作時(shí)間,。
通道級(jí)的顯示機(jī)制
發(fā)生故障時(shí),,可快速準(zhǔn)確地識(shí)別受影響的通道,,從而縮短了停機(jī)時(shí)間,并提高了工廠設(shè)備的可用性,。
TRACE 功能
TRACE 功能適用于所有CPU,,不僅增強(qiáng)了用戶程序和運(yùn)動(dòng)控制應(yīng)用診斷的準(zhǔn)確性,同時(shí)還優(yōu)化了驅(qū)動(dòng)裝置的性能
內(nèi)置CPU 顯示屏
可快速訪問各種文本信息和詳細(xì)的診斷信息,,以提高設(shè)備的可用性同時(shí)也便于全面了解工廠的所有信息
標(biāo)準(zhǔn)前連接器
標(biāo)準(zhǔn)化的前連接器不僅簡(jiǎn)化了電纜的接線操作,,同時(shí)還節(jié)省了更多的接線時(shí)間。
集成短接片
通過集成短接片的連接,,可以更為靈活便捷地建立電位組,。
集成DIN 導(dǎo)軌
可快速便捷地安裝自動(dòng)斷路器、繼電器之類的其它組件,。
靈活電纜存放方式
憑借兩個(gè)預(yù)先設(shè)計(jì)的電纜定位槽裝置,,即使存放粗型電纜,也可以輕松地關(guān)閉模塊前蓋板,。
預(yù)接線位置
通過帶有定位功能的轉(zhuǎn)向布線系統(tǒng),,無論是初次布線還是重新連接,都非??焖俦憬?。
集成的屏蔽夾
對(duì)模擬量信號(hào)進(jìn)行適當(dāng)屏蔽,可確保高質(zhì)量地識(shí)別信號(hào)并有效防止外部電磁干擾,。同時(shí),,使用插入式接線端子,,無需借助任何工具既可實(shí)現(xiàn)快速安裝,。
可擴(kuò)展性
靈活的可組裝性以及向上兼容性,便于系統(tǒng)的快速擴(kuò)展,,從而在更大程度上確保了投資回報(bào)和投資安全性,。
信息安全集成
編輯
SIMATIC S7-1500 中提供一種更為全面的安全保護(hù)機(jī)制,包括授權(quán)級(jí)別,、模塊保護(hù)以及通信的完整性等各個(gè)方面,。
“信息安全集成"機(jī)制除了可以確保投資安全,而且還可持續(xù)提高系統(tǒng)的可用性,。
專有技術(shù)保護(hù)
加密算法可以有效防范未經(jīng)授權(quán)的訪問和修改,。這樣可以避免機(jī)械設(shè)備被仿造,從而確保了投資安全,。
防拷貝保護(hù)
可通過綁定SIMATIC 存儲(chǔ)卡或CPU 的序列號(hào),,確保程序無法在其它設(shè)備中運(yùn)行。
這樣程序就無法拷貝,,而且只能在的存儲(chǔ)卡或CPU 上運(yùn)行,。
訪問保護(hù)
訪問保護(hù)功能提供一種全面的安全保護(hù)功能,可防止未經(jīng)授權(quán)的項(xiàng)目計(jì)劃更改。采用為各用戶組分別設(shè)置訪問密碼,,確保具有不同級(jí)別的訪問權(quán)限,。此外,安全的CP 1543-1 模塊的使用,,更是加強(qiáng)了集成防火墻的訪問保護(hù),。
操作保護(hù)
系統(tǒng)對(duì)傳輸?shù)娇刂破鞯臄?shù)據(jù)進(jìn)行保護(hù),防止對(duì)其進(jìn)行未經(jīng)授權(quán)的訪問,??刂破骺梢宰R(shí)別發(fā)生變更的工程組態(tài)數(shù)據(jù)或者來自陌生設(shè)備的工程組態(tài)數(shù)據(jù)。
6ES7313-5BG04-0AB0詳細(xì)說明
1 路徑插補(bǔ)功能簡(jiǎn)介
1.1 基本概念
插補(bǔ)的概念源于數(shù)控機(jī)床,。在數(shù)控機(jī)床中,,刀具不能嚴(yán)格地按照要求加工的曲線(直線)運(yùn)動(dòng),只能用折線軌跡逼近所要加工的曲線,。機(jī)床數(shù)控系統(tǒng)依照一定方法確定刀具運(yùn)動(dòng)軌跡的過程,,叫做插補(bǔ)。也可以說,,已知曲線上的某些數(shù)據(jù),,按照某種算法計(jì)算已知點(diǎn)之間的中間點(diǎn)的方法,或者稱為“數(shù)據(jù)點(diǎn)的密化",。插補(bǔ)的動(dòng)作過程:在每個(gè)插補(bǔ)周期(極短時(shí)間,,一般為毫秒級(jí))內(nèi),根據(jù)指令,、進(jìn)給速度計(jì)算出一個(gè)微小直線段的數(shù)據(jù),,刀具沿著微小直線段運(yùn)動(dòng),經(jīng)過若干個(gè)插補(bǔ)周期后,,刀具從起點(diǎn)運(yùn)動(dòng)到終點(diǎn),,完成輪廓的加工。
路徑運(yùn)動(dòng)初來自于機(jī)器人和CNC領(lǐng)域,,用機(jī)器人編程語言或G-Code編程,。它是指在多維空間中,通過一組軸的協(xié)作動(dòng)作,,各軸之間無主從之分,,它們按照設(shè)定的動(dòng)態(tài)響應(yīng)特性,實(shí)現(xiàn)路徑對(duì)象從起點(diǎn)到終點(diǎn)的的路徑軌跡運(yùn)動(dòng),。
路徑插補(bǔ)產(chǎn)生路徑的運(yùn)行軌跡,,計(jì)算插補(bǔ)周期內(nèi)的路徑插補(bǔ)點(diǎn),并通過機(jī)械運(yùn)動(dòng)系統(tǒng)轉(zhuǎn)換獲得對(duì)應(yīng)插補(bǔ)周期內(nèi)插補(bǔ)點(diǎn)的各路徑軸設(shè)定值,。
隸屬于機(jī)械運(yùn)動(dòng)系統(tǒng)的單獨(dú)軸在S7 technology中被為路徑軸,,路徑軸通過路徑對(duì)象執(zhí)行路徑運(yùn)動(dòng),。參考圖1 路徑軸與路徑對(duì)象。
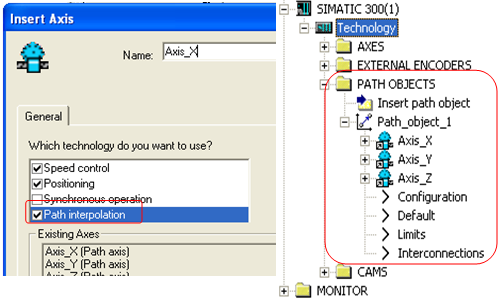
圖1 路徑軸與路徑對(duì)象
1.2 S7-Technology 路徑功能特點(diǎn)
S7-Technology 路徑插補(bǔ)功能概述:
> 從S7-Technology V4.2開始
> 允許進(jìn)行3軸插補(bǔ)操作
> 路徑插補(bǔ)可以通過直線,、圓弧,、多項(xiàng)式表示實(shí)現(xiàn)
> Move Path命令可以組成連續(xù)運(yùn)動(dòng)
> 支持多種機(jī)械運(yùn)動(dòng)學(xué)模型
> 可以與外部位置值同步,實(shí)現(xiàn)傳送帶跟蹤功能
S7-Technology 路徑插補(bǔ)的技術(shù)特點(diǎn):
> 所有的路徑軸都相互同步移動(dòng)
> 所有的路徑軸都同時(shí)到達(dá)目標(biāo)位置
> 路徑軌跡的移動(dòng),,將會(huì)始終是以一個(gè)固定的合成速度進(jìn)行 (如果動(dòng)態(tài)
特性限制沒有被超越)
> 速度性能的軸,,決定了整個(gè)軌跡的動(dòng)態(tài)特性
路徑差補(bǔ)可以執(zhí)行多3軸之間的2D或者3D的線性、圓弧或者多項(xiàng)式插補(bǔ),,路徑差補(bǔ)工藝對(duì)象(TO) ,,適用于機(jī)械運(yùn)動(dòng)學(xué)控制范疇,一個(gè)共同的系統(tǒng)中,,可以存在多個(gè)機(jī)械運(yùn)動(dòng)學(xué)控制結(jié)構(gòu),。同步于路徑軸的“同步軸",仍然可以實(shí)現(xiàn)同步控制,,例如,,旋轉(zhuǎn),凸輪開關(guān),,測(cè)量功能,。通過圖形化編輯器,可以簡(jiǎn)便地設(shè)置機(jī)械運(yùn)動(dòng)學(xué)控制系統(tǒng)的參數(shù),;通過動(dòng)態(tài)特性輪廓窗口,,可以輕松定義路徑的動(dòng)態(tài)特性;通過軌跡點(diǎn)表格,,可以輕松定義路徑差補(bǔ),,計(jì)劃目的地路徑。另外還可以定義保護(hù)防撞區(qū)域和實(shí)現(xiàn)傳送帶位置的跟蹤,。
1.3 機(jī)械運(yùn)動(dòng)系統(tǒng)的選擇
T-CPU 所實(shí)現(xiàn)運(yùn)動(dòng)學(xué),,等同于人們過去所熟悉機(jī)械運(yùn)動(dòng)學(xué)??梢詫⑺鼈兎譃槿缦聝煞N不同的類型。參考圖2 在 T-CPU 中集成的機(jī)械運(yùn)動(dòng)學(xué),。
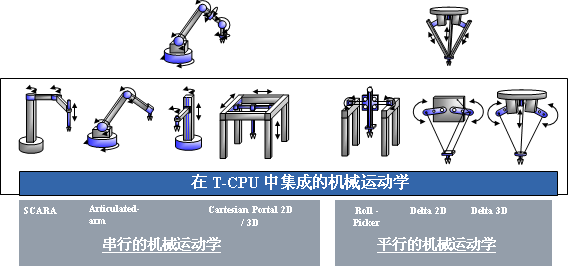
圖2 在 T-CPU 中集成的機(jī)械運(yùn)動(dòng)學(xué)
不同的機(jī)械運(yùn)動(dòng)系統(tǒng)可以實(shí)現(xiàn)TCP (Tool Center Point,,工具中心點(diǎn)或機(jī)械運(yùn)動(dòng)端點(diǎn))相同的路徑運(yùn)動(dòng)功能。盡管在某些情況下,,不同的機(jī)械運(yùn)動(dòng)系統(tǒng)可實(shí)現(xiàn)相同的路徑運(yùn)動(dòng),,但是,如果機(jī)械運(yùn)動(dòng)系統(tǒng)選擇不合理,,將有可能無法完成的路徑功能,。所以,,必須根據(jù)實(shí)際的工藝需求選擇合適的機(jī)械運(yùn)動(dòng)系統(tǒng),并在工廠布局中考慮該機(jī)構(gòu)的的合理安裝位置,。參考圖3 不同機(jī)械系統(tǒng)的轉(zhuǎn)化,。
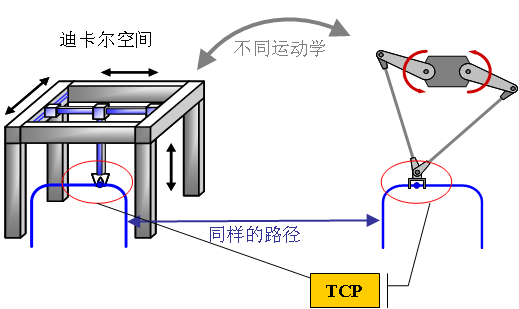
圖3 不同機(jī)械系統(tǒng)的轉(zhuǎn)化
2 路徑插補(bǔ)的實(shí)現(xiàn)方法
2.1 運(yùn)動(dòng)學(xué)模型簡(jiǎn)介
常用的運(yùn)動(dòng)學(xué)模型請(qǐng)參考圖 4 運(yùn)動(dòng)學(xué)模型。
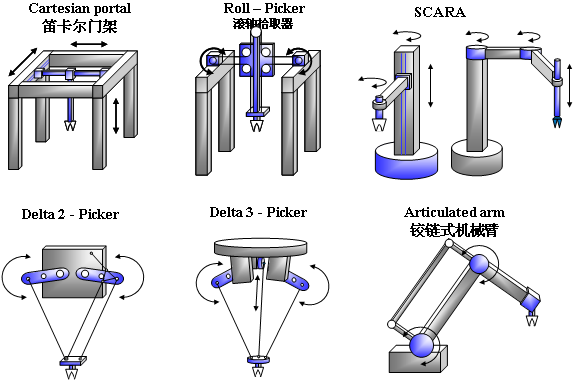
圖 4 運(yùn)動(dòng)學(xué)模型
下面介紹一些常用的運(yùn)動(dòng)學(xué)模型,。直角坐標(biāo)機(jī)器人 (英文名:Cartesian coordinate robot),,大型的直角坐標(biāo)機(jī)器人也稱桁架機(jī)器人或龍門式機(jī)器人,由多個(gè)運(yùn)動(dòng)自由度建成空間直角關(guān)系的,、多用途的操作機(jī)器,。工作的行為方式主要是通過完成沿著X、Y,、Z軸上的線性運(yùn)動(dòng),。因末端操作工具的不同,直角坐標(biāo)機(jī)器人可以非常方便的用作各種自動(dòng)化設(shè)備,,完成如焊接,、搬運(yùn)、上下料,、包裝,、碼垛、拆垛,、檢測(cè),、探傷、分類,、裝配,、貼標(biāo)、噴碼,、打碼,、(軟仿型)噴涂等一系列工作。參考圖5 直角坐標(biāo)機(jī)器人,。
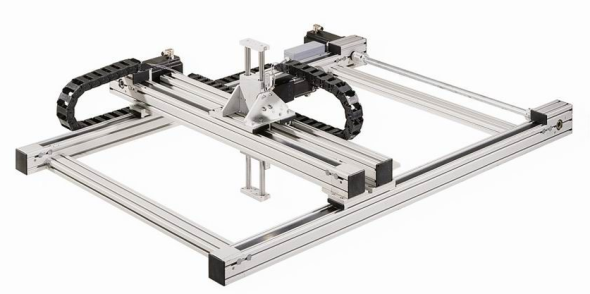
圖5 直角坐標(biāo)機(jī)器人
SCARA 機(jī)器人(Selective Compliance Assembly Robot Arm)是一種圓柱坐標(biāo)型的特殊工業(yè)機(jī)器人,。有3個(gè)旋轉(zhuǎn)關(guān)節(jié),其軸線相互平行,,在平面內(nèi)進(jìn)行定位,,另一個(gè)關(guān)節(jié)是移動(dòng)關(guān)節(jié),用于完成機(jī)械末端在垂直平面的運(yùn)動(dòng),。SCARA機(jī)器人在x,y方向上具有良好的順從性,、靈活性,而在Z軸方向具有良好的剛度,,此特性特別適合于裝配工作,。SCARA機(jī)器人廣泛應(yīng)用于塑料工業(yè),、汽車工業(yè)、電子產(chǎn)品工業(yè),、藥品工業(yè)和食品工業(yè)等領(lǐng)域,。它的主要職能是搬取零件和裝配工作。 參考圖6 SCARA 機(jī)器人,。
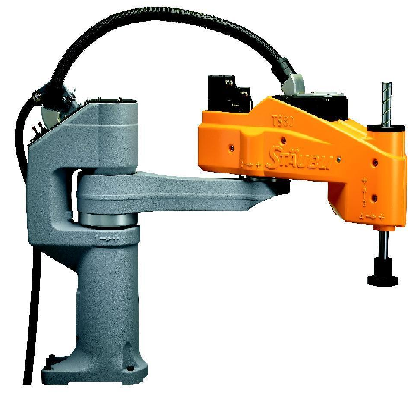
圖6 SCARA 機(jī)器人
鉸鏈型機(jī)械臂:有很高的自由度,,可以多至5~6軸,適合于幾乎任何軌跡或角度的工作,,可以自由編程,,完成全自動(dòng)化的工作, 提高生產(chǎn)效率;可以代替很多不適合人力完成,、有害身體健康的復(fù)雜工作,,比如,汽車外殼點(diǎn)焊,。參考圖 7 鉸鏈型機(jī)械臂,。

圖7鉸鏈型機(jī)械臂
Delta 3D機(jī)器人:外形酷似一只蜘蛛,這種*的幾何結(jié)構(gòu)賦予了它們質(zhì)量輕,,強(qiáng)度大,,輕便靈活,節(jié)省空間,,高速,,敏捷;適用于高速分揀,。參考圖8 Delta 3D機(jī)器人,。

圖8 Delta 3D機(jī)器人
2.2 路徑插補(bǔ)實(shí)現(xiàn)方法
首先需要做軸的定義,選擇“Path interploation",。參考圖 9 路徑軸的定義,。
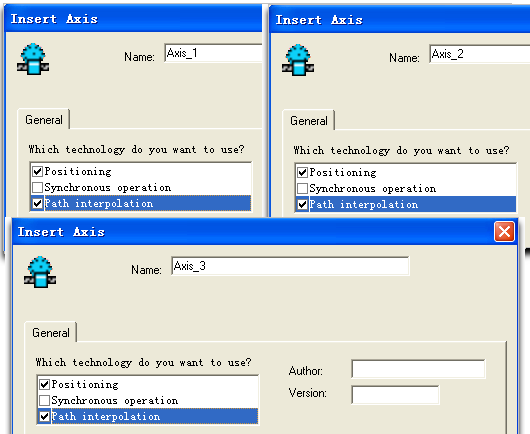
圖9 路徑軸的定義
然后雙擊“Insert path object"插入路徑對(duì)象。路徑對(duì)象是路徑插補(bǔ)及與路徑插補(bǔ)相關(guān)的其他任務(wù)的客體,,路徑對(duì)象也包括機(jī)械運(yùn)動(dòng)系統(tǒng)轉(zhuǎn)換,。參考圖10 插入路徑對(duì)象。
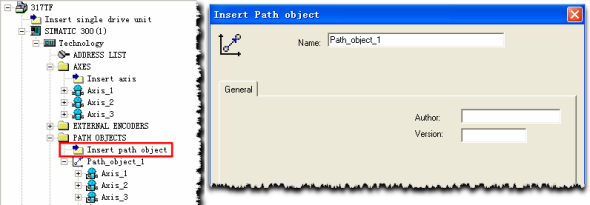
圖10 插入路徑對(duì)象
路徑對(duì)象生成后,,需要執(zhí)行軸的關(guān)聯(lián),。路徑軸與其他路徑軸一起,通過路徑對(duì)象執(zhí)行路徑運(yùn)動(dòng),。參考圖11 路徑軸的關(guān)聯(lián)。在該圖中,,路徑軸Axis_1,、Axis_2,、 Axis_3同屬于路徑對(duì)象Path_object_1。
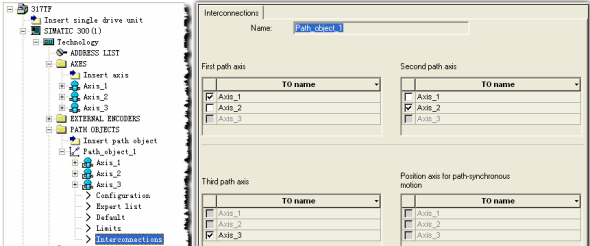
圖11 路徑軸的關(guān)聯(lián)
路徑軸關(guān)聯(lián)后,,需要選擇對(duì)應(yīng)的機(jī)械模型,,通過組態(tài),T-CPU自動(dòng)完成目標(biāo)坐標(biāo)系與機(jī)器坐標(biāo)系的轉(zhuǎn)換,。參考圖12 機(jī)械模型的選擇,。工藝組態(tài)完成后,會(huì)自動(dòng)生成各個(gè)軸以及路徑對(duì)象的工藝DB,,參考圖13 工藝DB,。然后就可以調(diào)用相應(yīng)的功能塊進(jìn)行程序的編寫工作。
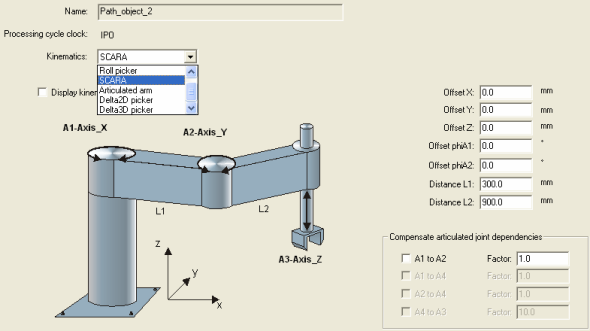
圖12機(jī)械模型的選擇
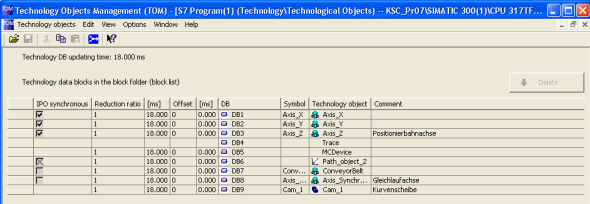
圖13 工藝DB
2.3 坐標(biāo)系的轉(zhuǎn)換
坐標(biāo)系是描述路徑及任何位置信息的必要條件,。在路徑插補(bǔ)功能中,,涉及三個(gè)坐標(biāo)系的轉(zhuǎn)換。分別是基礎(chǔ)坐標(biāo)系,、機(jī)器坐標(biāo)系和目標(biāo)坐標(biāo)系,。基礎(chǔ)坐標(biāo)系描述了機(jī)械運(yùn)動(dòng)系統(tǒng)在空間的安裝視圖,,參考圖14的紅色標(biāo)示,;機(jī)器坐標(biāo)系描述了路徑軸的位置視圖,參考圖14的黑色標(biāo)示,;目標(biāo)坐標(biāo)系描述了路徑運(yùn)動(dòng)的物體或工件的本地視圖,,參考圖14的藍(lán)色視圖。目標(biāo)坐標(biāo)系能與運(yùn)動(dòng)的傳送帶軸同步運(yùn)動(dòng),。路徑對(duì)象的運(yùn)動(dòng)命令的位置信息在目標(biāo)坐標(biāo)系中或在基礎(chǔ)坐標(biāo)系中,。
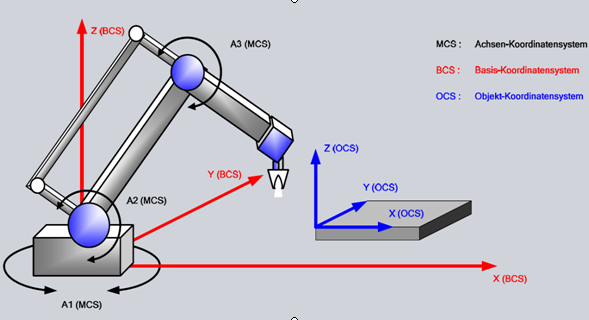
圖14 三種坐標(biāo)系
在T-CPU 的路徑對(duì)象中,可以通過 Offset (偏移量)來設(shè)定基本坐標(biāo)系的位置,,該偏移量的計(jì)算是從運(yùn)動(dòng)學(xué)對(duì)象的零點(diǎn)起始,,直到基本坐標(biāo)系(BCS)的原點(diǎn)為止。如圖15 坐標(biāo)系轉(zhuǎn)換示例,,X軸偏移值Offset X = 250+50 = 300,,Y軸偏移值 Offset Y= -550+50 = -500,Z軸偏移值 Offset Z = -1100+50+200 = -850,。計(jì)算完成坐標(biāo)系偏移值后,,需要在組態(tài)中填入這些偏移值,參考圖16 偏移量設(shè)定,。
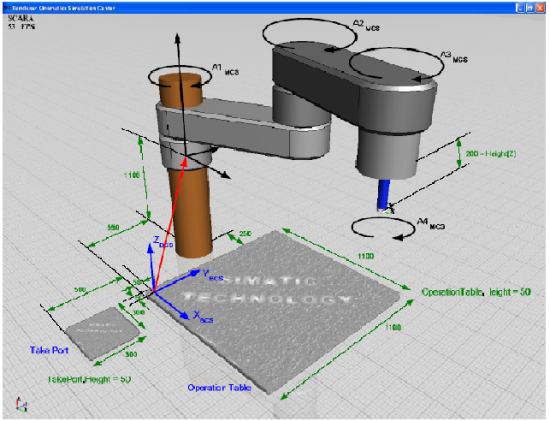
圖15 坐標(biāo)系轉(zhuǎn)換示例
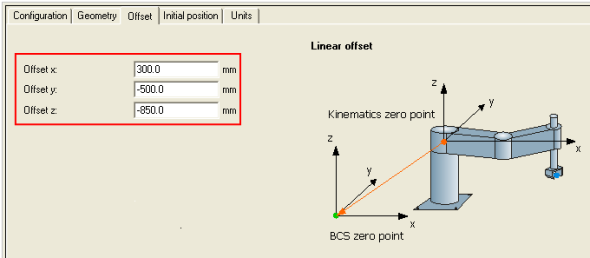
圖16 偏移量設(shè)定
在坐標(biāo)系轉(zhuǎn)換中,,不僅要考慮到坐標(biāo)系本身的偏移,還要考慮具體的機(jī)械結(jié)構(gòu)和機(jī)械臂的初始位置,。以SCARA系統(tǒng)為例,,有兩個(gè)臂長(zhǎng)L1, L2,,需要在組態(tài)中填寫這兩個(gè)長(zhǎng)度。參考圖17 SCARA 臂長(zhǎng)設(shè)定,。在初始位置,,機(jī)械臂相對(duì)于零點(diǎn)位置和機(jī)械臂之間可能有角度上的偏移,參考圖18 機(jī)械臂角度偏移,,需要在組態(tài)中去設(shè)置這個(gè)偏移角度,,參考圖19 機(jī)械臂角度偏移設(shè)置。
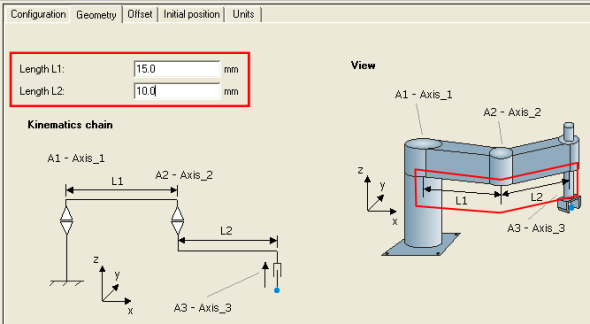
圖17 SCARA 臂長(zhǎng)設(shè)定
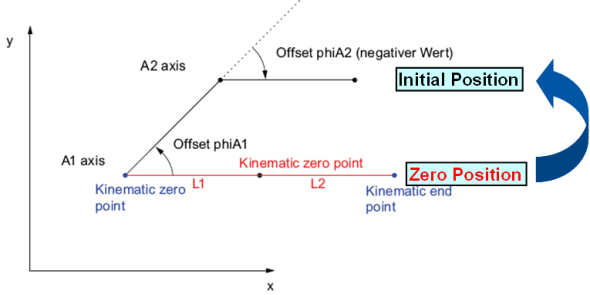
圖18 機(jī)械臂角度偏移
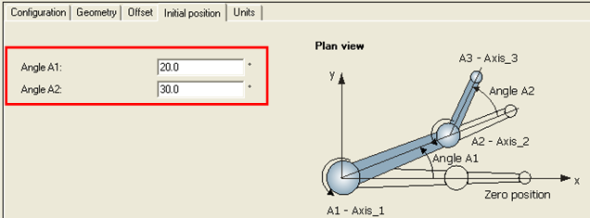
圖19 機(jī)械臂角度偏移設(shè)置
 您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)













