6ES7317-6TK13-0AB0參數(shù)詳細(xì)
導(dǎo)致G120變頻器CU240B/E-2和CU250S-2發(fā)生F1662(內(nèi)部通信錯(cuò)誤)的可能原因是什么,?如何消除這個(gè)故障?
回答
F1662與控制單元內(nèi)部通信有關(guān),。當(dāng)F1662發(fā)生時(shí),,只能通過斷電再上電來復(fù)位故障。
通過現(xiàn)場案例,,發(fā)現(xiàn)導(dǎo)致CU240B/E-2和CU250S-2發(fā)生F1662故障的可能原因如下:
1. 控制單元的繼電器輸出(DO)與220VAC連接,。
CU240B/E-2和CU250S-2的數(shù)字量輸出僅允許與直流電源連接(30V DC, 0.5A)。如果這些數(shù)字量輸出點(diǎn)與交流220V電源連接,,變頻器會(huì)偶爾報(bào)出F1662,。這是因?yàn)閺慕涣?20V過來的電磁干擾可能進(jìn)入到控制單元的電子電路中,,尤其是交流220V繼電器/接觸器/抱閘等設(shè)備的線圈沒有配置RC吸收回路的時(shí)候。
2. 控制單元DO連接24V電源,,但中間繼電器沒有二極管吸收回路,。
中間繼電器的線圈等效為一個(gè)電感元件,當(dāng)變頻器DO觸點(diǎn)斷開時(shí),,中間繼電器線圈的導(dǎo)通回路即被斷開,,如果在線圈兩端沒有反并聯(lián)的二極管,通過該等效電感的電流將發(fā)生突變,,導(dǎo)致電感兩端產(chǎn)生很大的感應(yīng)電壓,,該電壓通過變頻器DO觸點(diǎn)影響控制單元內(nèi)部電路。如果采用控制單元內(nèi)部24V(9,、28端子)驅(qū)動(dòng)中間繼電器線圈,,該感應(yīng)電壓還能通過內(nèi)部24V電路來影響控制單元。
下圖是用示波器測量的DO觸點(diǎn)斷開時(shí)觸點(diǎn)兩端的感應(yīng)電壓波形,,圖1為中間繼電器不帶二極管吸收回路時(shí)的情況,圖2為中間繼電器帶二極管吸收回路時(shí)的情況:
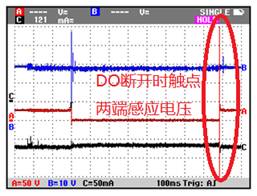
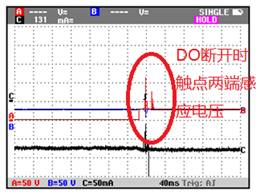
圖1 中間繼電器不帶二極管吸收回路 圖2 中間繼電器帶二極管吸收回路
解決方案
增加一個(gè)帶直流24V線圈的中間繼電器,。保證沒有交流220V直接與控制單元連接,。
同時(shí)需要配置與線圈反并聯(lián)的吸收二極管。該二極管有續(xù)流的作用,,可以避免數(shù)字量輸出觸點(diǎn)斷開時(shí)在繼電器線圈上感應(yīng)出高電壓,,進(jìn)而產(chǎn)生干擾影響變頻器控制單元。有的24V繼電器內(nèi)部集成了二極管吸收回路,,如果繼電器未集成,,需要外加續(xù)流二極管。
下圖是內(nèi)部集成了二極管吸收回路的24V中間繼電器示意圖:

圖3內(nèi)部集成了二極管吸收回路的24V中間繼電器示意圖
注意
· F1662已經(jīng)在至少V4.6 和V4.7固件的CU240B/E-2和CU250S-2中發(fā)現(xiàn),。
· CU230P-2的DO0和DO2允許連接交流220V電源(250V AC, 2A),。
1 概述
在PLC與V90PN通訊交換數(shù)據(jù)的過程當(dāng)中,常常需要讀取驅(qū)動(dòng)器的實(shí)際運(yùn)行數(shù)據(jù)用作顯示或計(jì)算,。本文分別介紹兩種方法讀取驅(qū)動(dòng)器相關(guān)的運(yùn)行數(shù)據(jù),。
2 運(yùn)行數(shù)據(jù)的讀取
方法一:
當(dāng)V90 PN配置為EPOS控制模式,且選擇標(biāo)準(zhǔn)報(bào)文111時(shí),,報(bào)文中在接受與發(fā)送方向均包含一個(gè)可供用戶自定義的保留字(PZD12),,如圖2-1所示。
圖2-1 用戶自定義的保留字
此時(shí),,可以通過修改參數(shù)P29151(用戶自定義PZD發(fā)送字)來定義傳輸方向PZD12的內(nèi)容,。可選擇的運(yùn)行數(shù)據(jù)為實(shí)際扭矩,、實(shí)際電流,、DI狀態(tài),。如果需要讀取此外其他運(yùn)行數(shù)據(jù)請(qǐng)參考方法二。
方法二:
可以通過基于非周期通訊方式使用FB286(SINA_PARA)或FB287(SINA_PARA_S)功能塊讀取驅(qū)動(dòng)器運(yùn)行數(shù)據(jù)
6ES7317-6TK13-0AB0參數(shù)詳細(xì)
首先,,針對(duì)西門子PLC模塊的選型,,先說一下常用編碼器的分類,普通分為增量型編碼器和**值編碼器,。
增量式編碼器提供了一種對(duì)連續(xù)位移量離散化,、增量化以及位移變化(速度)的傳感辦法。增量式編碼器的特性是每產(chǎn)生一個(gè)輸出脈沖信號(hào)就對(duì)應(yīng)于一個(gè)增量位移,,它可以產(chǎn)生與位移增量等值的脈沖信號(hào),。增量式編碼器丈量的是相關(guān)于某個(gè)基準(zhǔn)點(diǎn)的相對(duì)位置增量,而不可以直接檢測出**位置信息,。
而**值的編碼器的原理及組成部件與增量式編碼器根本相同,,與增量式編碼器不同的是,**式編碼器用不同的數(shù)碼來指示每個(gè)不同的增量位置,,它是一種直接輸出數(shù)字量的傳感器,。
依據(jù)信號(hào)類型又將增量型編碼器分為:有集電極開路輸出(圖1、2),、長線驅(qū)動(dòng)輸出(圖3)和推挽式輸出(圖4)等多種輸出信號(hào),,其中這四種是工業(yè)中比擬常見和運(yùn)用比擬頻繁的信號(hào)。
關(guān)于**值的編碼器的信號(hào)輸出比擬常見的是SSI的輸出信號(hào)(圖5)
通常來說,,**值編碼器由于斷電后能夠堅(jiān)持碼值,,所以普通用于位置讀取,增量型編碼器由于斷電后不能堅(jiān)持,,所以常常用于讀取瞬時(shí)量,,例如速度,頻率等信號(hào),。
下面來看一下西門子提供運(yùn)用的高數(shù)計(jì)數(shù)模塊的型號(hào):
關(guān)于S7-300和ET200M產(chǎn)品,,提供了3種模塊:CPU31xC,F(xiàn)M350-1,,F(xiàn)M350-2,,SM338。
關(guān)于S7-400產(chǎn)品,,提供了1種模塊:FM450-1
關(guān)于ET200S產(chǎn)品,,提供了3種模塊:1Count24V,1Count5V,,1SSI,。
關(guān)于ET200SP產(chǎn)品,提供了2種模塊:TM Count 1*24V,,TM PosInput 1
關(guān)于S7-1500和ET200MP產(chǎn)品,,提供了4種模塊:CPU151 xC,,2 Count24V,2Count5V,,DI 24V Input HF,。
關(guān)于S7-1200產(chǎn)品,提供了1種模塊:CPU121 xC
面對(duì)這么多的模塊,,該如何選擇呢,?能夠經(jīng)過編碼器類型和輸入的信號(hào)類型停止選型,參考表1,。
注:
1)關(guān)于DI HF模塊的計(jì)數(shù)功用僅支持單脈沖計(jì)數(shù),,不支持A/B相的編碼器。
2)關(guān)于5VTTL的編碼器僅CPU1517C支持,,其它型號(hào)的S7-1200的CPU不支持,。
經(jīng)過以上這個(gè)列表就能夠針對(duì)編碼器選擇能夠讀取計(jì)數(shù)的模塊了。
其次,,在模塊運(yùn)用時(shí),,好多用戶表示無法讀取編碼器的數(shù)值,計(jì)數(shù)值不斷為零,。這個(gè)可能就跟模塊的門信號(hào)有關(guān)了,。
關(guān)于高數(shù)計(jì)數(shù)模塊,其中的一些模塊包含了門控制,,分別是軟件門,硬件門和內(nèi)部門,。軟件門是經(jīng)過程序控制,,將相應(yīng)的控制位翻開,停止軟門的翻開,。硬件門是經(jīng)過計(jì)數(shù)模塊的DI點(diǎn)的信號(hào),,停止硬門翻開。內(nèi)部門是軟件門與硬件門的“與"關(guān)系的結(jié)果(FM350-1是“或"關(guān)系的結(jié)果),,假如未組態(tài)硬件門,,那就是軟件門的結(jié)果,只用當(dāng)內(nèi)部門的結(jié)果為True時(shí),,才干讀取到計(jì)數(shù)值,。
下面也經(jīng)過表2的方式看一下模塊門的組態(tài)
注:
1) 未定義門:此模塊能夠組態(tài)為無門控制,假如組態(tài)為無門控制,,用戶就能夠直接讀取計(jì)數(shù)值,。
2) 內(nèi)部門狀態(tài):表達(dá)的是內(nèi)部門的狀態(tài)是有軟件門和硬件門之間的關(guān)系,并把相應(yīng)的關(guān)系結(jié)果給到內(nèi)部門,。
3) 關(guān)于CPU121xC的計(jì)數(shù),,假如未運(yùn)用程序編程,,直接讀取ID時(shí),為沒有門控制狀態(tài)
4) 關(guān)于CPU121xC的計(jì)數(shù),,硬件門功用僅可用在組態(tài)計(jì)數(shù)形式的HSC時(shí)運(yùn)用,。
所以假如不能讀取到計(jì)數(shù)值時(shí),能夠優(yōu)先檢查一下內(nèi)部門的狀態(tài)能否為True,,假如不是下部就開端檢查軟件門和硬件門哪個(gè)有問題了,。
再有,關(guān)于頻率或者速度丈量時(shí),,經(jīng)常有客戶反映關(guān)于高速時(shí)丈量值是對(duì)的,,而在低速時(shí)丈量值是錯(cuò)誤的,這個(gè)是由于在組態(tài)丈量時(shí)需求組態(tài)更新時(shí)間(圖6),,要在這個(gè)時(shí)間內(nèi)至少有兩個(gè)以上的脈沖,,才干停止丈量的計(jì)算,假如只要一個(gè)脈沖是無法計(jì)算丈量值的,,一切假如低速丈量值錯(cuò)誤的狀況,,普通需求檢查更新時(shí)間。
以上是西門子PLC模塊選型以及運(yùn)用上常見問題的一些總結(jié),,當(dāng)然關(guān)于模塊的選型還有其它方面的參數(shù),,例如*大脈沖頻率能否滿足,通道數(shù)量能否滿足,,能否能夠運(yùn)用工藝組態(tài)等,,這些參數(shù)也很重要,也會(huì)對(duì)模塊的運(yùn)用形成問題
 您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)














擊打開原圖")
擊打開原圖")
擊打開原圖")
擊打開原圖")
擊打開原圖")
擊打開原圖")