西門子6SE6440-2UC25-5CA1
PLC由什么組成,?在了解PLC的含義及發(fā)展歷程之后,,PLC具體是由什么組成呢?其實(shí),PLC主要由處理器(CPU),、存儲器,、輸出/輸入接口、編程器等幾大部分構(gòu)成,。其中,,CPU顯而易見是PLC的大腦核心,并由此達(dá)成對PLC更好的實(shí)時控制,;存儲器主要用于存放系統(tǒng)程序,、用戶程序及工作數(shù)據(jù);輸出/輸入接口則用于連接PLC與被控設(shè)備,;編程器用于用戶程序的編制,、編輯、調(diào)試,、檢查和監(jiān)視,,還可以顯示PLC的各種狀態(tài)。但PLC并不只由以上幾部分構(gòu)成,,由于PLC還存在不同的分類,,所以在不同分類時各組成部分又有所差異,因此不能一概而論,。之后小編會與大家細(xì)說,,這里就不做贅述了。
如果是輕載,,則在正常運(yùn)行時,,也保持所需的較低端電壓,使電機(jī)的功率因數(shù)升高,,效率增大,。
PLC的應(yīng)用范圍?目前,,PLC在已廣泛應(yīng)用于鋼鐵,、石油、化工,、電力,、建材、機(jī)械制造,、汽車,、輕紡、交通運(yùn)輸,、環(huán)保及文化娛樂等各個行業(yè),,主要應(yīng)用于開關(guān)量邏輯控制,、工業(yè)過程控制、運(yùn)動控制,、數(shù)據(jù)處理,、通信及聯(lián)網(wǎng)等幾大類,不難看出,,隨著工業(yè)的發(fā)展PLC的運(yùn)用也越發(fā)廣泛,。由此可見,PLC的重要性,。
優(yōu)點(diǎn):硬件簡單,、造價低,可控制32臺變頻器,。S7-200系列PLC內(nèi)部提供豐富的定時器功能,可以利用階梯上升曲線的方式模擬斜坡曲線,亦可利用PLC提供的積分功能,使輸出信號按一定斜率輸出,。
什么是PLC控制柜?PLC控制柜有過載,、短路,、缺相保護(hù)等功能,其結(jié)構(gòu)緊湊,、工作穩(wěn)定,、功能齊全,,可以根據(jù)實(shí)際控制規(guī)摸大小進(jìn)行組合,,既可以實(shí)現(xiàn)單柜自動控制,也可以實(shí)現(xiàn)多柜通過工業(yè)以太網(wǎng)或工業(yè)現(xiàn)場總線網(wǎng)絡(luò)組成集散(DSC)控制系統(tǒng),,能適應(yīng)各種大小規(guī)模的工業(yè)自動化控制場合,,被廣泛應(yīng)用在電力、冶金,、化工,、造紙、環(huán)保污水處理等行業(yè)中,。

西門子變頻器6SE6440-2UC24-0CA1現(xiàn)貨供應(yīng) PLC對各種內(nèi)容的嵌套的層數(shù)都有一定的規(guī)定,。
軟起動器特別適用于各種泵類負(fù)載或風(fēng)機(jī)類負(fù)載,需要軟起動與軟停車的場合,。
PLC控制柜可完成設(shè)備自動化和過程自動化控制,,實(shí)現(xiàn)的網(wǎng)絡(luò)功能。其性能穩(wěn)定,、可擴(kuò)展,、抗干擾強(qiáng)等特點(diǎn),是現(xiàn)代工業(yè)的核心和靈魂,。大家在使用時可以根據(jù)自身需求設(shè)計(jì)PLC控制柜,、變頻柜等,,并可搭配人機(jī)界面觸摸屏,達(dá)到輕松操作的目的,。
軟啟動的特性(1)啟動電流以一定的斜率上升至設(shè)定值,,對電網(wǎng)無沖擊。

西門子電源可編程邏輯控制器的電源在整個系統(tǒng)中起著十分重要的作用,。如果沒有一個良好的,、可靠的電源系統(tǒng)是無常工作的,因此,,可編程邏輯控制器的制造商對電源的設(shè)計(jì)和制造也十分重視,。
西門子變頻器6SE6440-2UC24-0CA1現(xiàn)貨供應(yīng) 在現(xiàn)在生產(chǎn)條件下,當(dāng)利用變頻器構(gòu)成自動控制系統(tǒng)進(jìn)行控制時,,很多情況下是需要采用PLC和變頻器相配合使用,,例如軸承清洗、包裝紙印刷,、PCB板制作等,。HMI相對于普通按鍵式顯示板具有畫面直觀、易操作,、功能豐富,、設(shè)計(jì)簡單等優(yōu)點(diǎn)。 出棧時,,棧頂?shù)臄?shù)從棧中彈出(不在棧中了)而下面的數(shù)則依序向上移動一個單元,。
處理單元(CPU)處理單元(CPU)是可編程邏輯控制器的控制中樞。它按照可編程邏輯控制器系統(tǒng)程序賦予的功能接收并存儲從編程器鍵入的用戶程序和數(shù)據(jù),;檢查電源,、存儲器、I/O以及警戒定時器的狀態(tài),,并能診斷用戶程序中的語法錯誤,。
4、改進(jìn)性能
隨著控制功能從DCS轉(zhuǎn)移到單獨(dú)的控制回路,,由于就地控制更快,,更準(zhǔn)確,系統(tǒng)的集成度和可靠性也增加了?,F(xiàn)場總線還能充分利用具有多傳感器設(shè)備的優(yōu)點(diǎn),,因?yàn)樵谝粚?dǎo)線上允許多個信息流動。
由于現(xiàn)場總線使得更容易從現(xiàn)場獲取設(shè)備信息,,工廠操作員和管理人員能夠?qū)ζ溥^程進(jìn)行更嚴(yán)格的控制,,從而改進(jìn)性能、增加過程的可用性和一致性,。
現(xiàn)場總線不僅是一種信號通訊協(xié)議,,還是一種全新的控制過程的方法,。目前,在PLC和工控中使用的主流現(xiàn)場總線協(xié)議有西門子的ProfiBus,,羅克韋爾自動化的ControlNet和DeviceNet以及基金會現(xiàn)場總線FF等,。以下以ControlNet和DeviceNet為例介紹工業(yè)自動化中的網(wǎng)絡(luò)體系結(jié)構(gòu)和通訊技術(shù)。
控制網(wǎng)(ControlNet)是近年來推出的一種新的面向控制層的實(shí)時性現(xiàn)場總線網(wǎng)絡(luò),,在同一物理介質(zhì)鏈路上提供時間關(guān)鍵性I/O數(shù)據(jù)和報文數(shù)據(jù),,包括程序的上載/下載,組態(tài)數(shù)據(jù)和點(diǎn)對點(diǎn)的報文傳遞等通訊支持,,是具有高度確定性,、可重復(fù)的高速控制和數(shù)據(jù)采集的網(wǎng)絡(luò),I/O性能和端到端通訊性能都較傳統(tǒng)網(wǎng)絡(luò)有較大提高,。
3. 人機(jī)界面產(chǎn)品的基本功能及選型指標(biāo)
基本功能:
設(shè)備工作狀態(tài)顯示,,如指示燈、按鈕,、文字,、圖形、曲線等,;
數(shù)據(jù),、文字輸入操作,打印輸出,;
生產(chǎn)配方存儲,,設(shè)備生產(chǎn)數(shù)據(jù)記錄;
簡單的邏輯和數(shù)值運(yùn)算,;
可連接多種工業(yè)控制設(shè)備組網(wǎng),。
選型指標(biāo):
顯示屏尺寸及色彩,,分辨率,;
HMI的處理器速度性能;
輸入方式:觸摸屏或薄膜鍵盤,;
畫面存貯容量,,注意廠商標(biāo)注的容量單位是字節(jié)(byte)、還是位(bit),;
通訊口種類及數(shù)量,,是否支持打印功能。

30.啟動過程中輸出頻率在低速震蕩,。
有些電機(jī)在低速時,,因?yàn)辇X槽效應(yīng)等影響,電流波動非常大,,此時變頻器可能出現(xiàn)限流,,使得變頻器出現(xiàn)加速,、限流減速等反復(fù),而無法正常加速,。增加限流電流設(shè)置;縮短啟動時間;某個單元輸出電壓低,更換此單元;
31.自動旁路柜自動旁路時上級開關(guān)柜跳閘,。
查看旁路柜中延時吸合時間繼電器的時間是否在1.5S--3S之間;開關(guān)柜整定值是否太小(應(yīng)該在電機(jī)額定電流的5倍以上);將開關(guān)柜的速斷保護(hù)時間設(shè)定為大于0.1S。
控制功能:線性v/f控制,,平方v/f控制,,可編程多點(diǎn)設(shè)定v/f控制,磁通電流控制免測速矢量控制,,閉環(huán)矢量控制,,閉環(huán)轉(zhuǎn)矩控制,節(jié)能控制模式,;標(biāo)準(zhǔn)參數(shù)結(jié)構(gòu),,標(biāo)準(zhǔn)調(diào)試軟件;數(shù)字量輸入6個,,模擬量輸入2個,,模擬量輸出2個,繼電器輸出3個,;獨(dú)立I/O端子板,,方便維護(hù);采用BiCo技術(shù),,實(shí)現(xiàn)I/O端口自由連接
電動控制:指控制系統(tǒng)的輸出是通過電氣量或電子信號來進(jìn)行的,,所控制的對象是電動執(zhí)行元件,比如繼電器、步進(jìn)開關(guān),、電磁閥,、伺服驅(qū)動器和變頻器等等,絕大部分的自動控制多多少少都會有電動控制元件,。
西門子MPI是什么意思,。MPI是西門子PLC支持的一種通信協(xié)議,MPI多點(diǎn)接口,,九針的RS485,,一般用在通信距離較近的場合,MPI應(yīng)該是串行通信,。1,、通信協(xié)議(communicationsprotocol)是指雙方實(shí)體完成通信或服務(wù)所必須遵循的規(guī)則和約定。
2,、通過通信信道和設(shè)備互連起來的多個不同地理位置的數(shù)據(jù)通信系統(tǒng),,要使其能協(xié)同工作實(shí)現(xiàn)信息交換和資源共享,它們之間必須具有共同的語言,。交流什么,、怎樣交流及何時交流,,都必須遵循某種互相都能接受的規(guī)則。這個規(guī)則就是通信協(xié)議,。
MPI是多點(diǎn)接口(MultiPointInterface)的簡稱,,是西門子公司開發(fā)的用于PLC之間通訊的保密的協(xié)議。MPI通訊是當(dāng)通信速率要求不高,、通信數(shù)據(jù)量不大時,,可以采用的一種簡單經(jīng)濟(jì)的通訊方式。MPI通信可使用PLCS7-200/300/400,、操作面板TP/OP及上位機(jī)MPI/PROFIBUS通信卡,,如CP5512/CP5611/CP5613等進(jìn)行數(shù)據(jù)交換。
當(dāng)線電壓或負(fù)載電流改變肘,,直流電源的輸出電壓也會有所起伏,。穩(wěn)壓程度由穩(wěn)壓電路的參數(shù)決定,參數(shù)是指濾波電容的容量和能量開釋的速率,。
假如給電源供電的一個相對恒定的電源,,那么只需根本的負(fù)載穩(wěn)壓。安穩(wěn)度的巨細(xì)一般界說為空載或滿載時輸出電壓的百分比,,或電壓的改變值,。。
1)MPI電纜通訊方式:組態(tài)王所在的計(jì)算機(jī)必須安裝STEP7編程軟件,;2)MPI通訊卡方式:組態(tài)王所在的計(jì)算機(jī)必須安裝STEP7編程軟件,;3)以太網(wǎng)通訊方式:不需要在組態(tài)王所在的計(jì)算機(jī)上安裝STEP7或Simaticnet通訊軟件;4)Profibus-DP通過方式:需要在本機(jī)上安裝STEP7編程軟,。
西門子6SE6440-2UC25-5CA1
西門子MM420,、MM440,MM430變頻器 產(chǎn)品簡介:
組態(tài)工具 "S7 Technology" 和"SIMOTION SCOUT" 都帶有 "STARTER" 軟件.
因此, 是不能再獨(dú)立安裝非集成版本的 "STARTER"來要設(shè)置"MICROMASTER" 和"SINAMICS" 產(chǎn)品系列的驅(qū)動設(shè)備; 比如, 在標(biāo)準(zhǔn)S7 CPU上操作這些驅(qū)動設(shè)備.
下面說明了在組態(tài)工具 "S7 Technology" 和"SIMOTION SCOUT" 集成的 "STARTER"中如何設(shè)置"MICROMASTER" 和"SINAMICS" 產(chǎn)品系列的驅(qū)動設(shè)備.
| No. | 步驟 |
| 1 | 建立 STEP 7 項(xiàng)目:
|
MM4變頻器的*高輸出頻率,,除了與參數(shù)P1082(*高頻率)有關(guān)外,,還與其他條件有關(guān)。
當(dāng)PID自整定功能被激活時(P2350=1,2,3,4),,BOP面板會顯示“A0936"報警,,報警與參數(shù)P2350交替閃爍,此 時變頻器在很低的頻率下運(yùn)行,,整定會花費(fèi)幾分鐘的時間。整定結(jié)束后,,報警將自動消失,,變頻器開始正常運(yùn)行。
如果采用非矢量控制方式(P1300≤19),,則*高輸出頻率僅受參數(shù)P1802的限制:
即,,fmax = P1082
如果采用矢量控制方式(P1300≥20),,則*高輸出頻率為以下限制條件中的*小值:
| 限制條件 | 含義 |
| P1082 | *高頻率 |
| 200 | 矢量控制方式的*高輸出頻率 |
| P0310*5 | 5倍的電機(jī)額定頻率 |
即,fmax = (P1082,,200,,5*P310)min
注:載波脈沖頻率P1800,會隨著對參數(shù)P1082和P0310的修改而自動更改,,以滿足輸出頻率對P1800的要求,,因此不需要考慮P1800對*高輸出頻率的限制。
MM440,,MM430,,G120系列變頻器的PID功能有效時,在通常設(shè)定下,,斜坡時間P1120,,P1121的設(shè)置是無效的。這樣,,如果PI參數(shù)設(shè)定不當(dāng),,系統(tǒng)響應(yīng)過快,變頻器運(yùn)行時就容易出現(xiàn)F0001過流,,F(xiàn)0002過壓等故障,;或者為了避免這些故障,降低系統(tǒng)響應(yīng),,造成系統(tǒng)響應(yīng)過慢,,不能滿足工藝要求。
針對PID相關(guān)參數(shù),,可以參考以下例子進(jìn)行設(shè)定,,使PID功能與斜坡時間P1120,P1121同時有效,。
P1070=2294
P1120=10(斜坡上升時間,,根據(jù)實(shí)際情況設(shè)定)
P1121=10(斜坡下降時間,根據(jù)實(shí)際情況設(shè)定)
P2200=0
P2253=2890(PID目標(biāo)值給定通道,,根據(jù)實(shí)際情況設(shè)定)
P2264=755.0(反饋通道,,根據(jù)實(shí)際情況設(shè)定)
P2280=3(比例增益,根據(jù)實(shí)際情況設(shè)定)
P2285=5(積分時間,,根據(jù)實(shí)際情況設(shè)定)
P2890=50(PID目標(biāo)值給定,,根據(jù)實(shí)際情況設(shè)定)
以上參數(shù)在MM430 V2.02,MM440 V2.09,,G120 V3.0驗(yàn)證通過,。
MM4變頻器在現(xiàn)場使用中,有時會•出現(xiàn)報警A911或者A502,檢查進(jìn)線電壓和直流母線電壓均正常,。造成報警的原因分析如下:
MM4變頻器在運(yùn)行時會檢測直流母線的電壓值,,當(dāng)直流母線過高或者過低時,變頻器會產(chǎn)生相應(yīng)的報警或故障代碼,。如圖1所示:
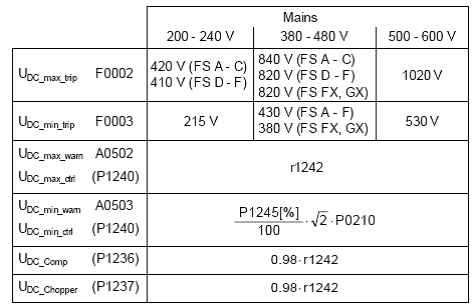
圖1 MM4變頻器直流母線電壓檢測
如圖在直流母線電壓大于r1242的值時,,如果Vdmax控制器已使能會出現(xiàn)A0911報警,如果Vdmax控制器沒有使能,,會出現(xiàn)A0502報警,。
r1242的值與參數(shù)P1254的設(shè)置有關(guān),當(dāng)P1254=0時: 
而當(dāng)P1254=1時,,變頻器在啟動過程中會根據(jù)進(jìn)線電壓自動計(jì)算確定r1242的值,。
如果P1254=1,在現(xiàn)場使用中可能遇到這種情況:在啟動變頻器時,,電網(wǎng)的電壓比較低(例如電網(wǎng)上接有大的負(fù)載時),,此時 變頻器根據(jù)當(dāng)前進(jìn)線電壓計(jì)算出一個較低的閾值(r1242),而在正常運(yùn)行中,,電網(wǎng)電壓恢復(fù)正常電壓值(例如電網(wǎng)上大的負(fù)載停止工作),,此時直流母線電壓可能會超過r1242的閾值,出現(xiàn)報警A0911或A0502,。而此時,,如果測量進(jìn)線電壓或直流母線電壓均正常。
在這種情況下可以設(shè)置P1254=0,,禁止變頻器電壓的自動檢測,,可以解決此類問題。
用戶可以使用以下命令通過 USS 建立 JOG 操作:
1) P0700 必須設(shè)置為 4 或 5 (分別通過 RS232 或 RS485 進(jìn)行 USS 通訊 )
2) 變頻器必須停止并準(zhǔn)備運(yùn)行,。
要完成此操作,,發(fā)送 PZD 命令 047E 0000 (十六進(jìn)制)
= (0000 0100 0111 1110 0000 0000 0000 0000).
變頻器需使用 FA31 0000 (十六進(jìn)制) 進(jìn)行應(yīng)答
= (1111 1010 0011 0001 0000 0000 0000 0000)
3) 要右向點(diǎn)動 (JOG),發(fā)送命令 057E 0000 (十六進(jìn)制)
= (0000 0101 0111 1110 0000 0000 0000 0000)
4) 要左向點(diǎn)動 (JOG),,發(fā)送命令 067E 0000 (十六進(jìn)制)
= (0000 0110 0111 1110 0000 0000 0000 0000)
5) 要停止,,則發(fā)送命令 047E 0000 (十六進(jìn)制)
= (0000 0100 0111 1110 0000 0000 0000 0000)
使用控制位 8 和 9 可以改變點(diǎn)動 (JOG) 方向但并不會停止運(yùn)行。
例如:057E 0000 命令后使用 067E 0000,,變頻器無需停機(jī)就可將點(diǎn)動方向從右向改變到左向,。
MM430和MM440中FX,GX尺寸的變頻器,,在配置DP模板使用外部24V供電,,在變頻器主電源斷電的情況下,變頻器出現(xiàn)F0022,A0522故障和報警,,如何處理,?
回答:
通過DP模板上的端子給變頻器提供24V電源時,,對于尺寸為FX,GX的變頻器,,在變頻器主電源斷電的情況下可能會出現(xiàn)A0522,、F0022!這樣在變頻器主電源恢復(fù)的情況下也不能直接啟動運(yùn)行變頻器,,必須得先確認(rèn)故障然后再運(yùn)行變頻器,!
解決辦法如下:
將通過DP模板上的端子提供外部24V供電,改為通過端子X9上的1,,2號端子提供外部24V供電即可解決這個問題,。
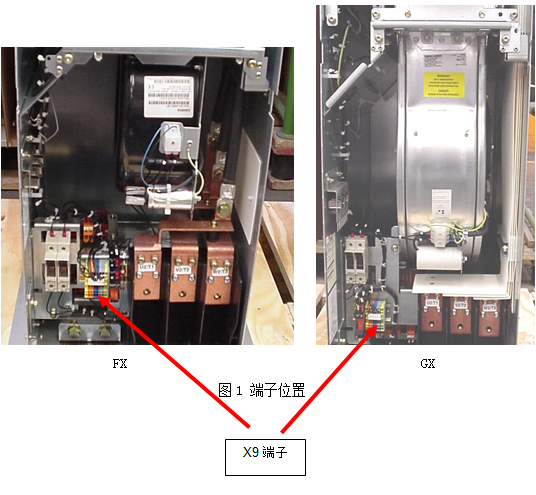

圖1:設(shè)置參數(shù)P0724的濾波邏輯示意圖
方法1
利用自由功能塊(FFB)的定時器實(shí)現(xiàn),。將數(shù)字量輸入DIN1經(jīng)過一個定時器延時,,然后,在應(yīng)用中利用定時器1的輸出信號r2852取代r0722就可以了,。
如圖2所示,,假設(shè)原來的應(yīng)用是用數(shù)字量輸入DIN1(即5號端子)作為變頻器的ON/OFF1起停命令,參數(shù)設(shè)置如下:
P0700.0 = 2, P0701.0 = 1
經(jīng)過消抖設(shè)置后,,參數(shù)設(shè)置變成:
P0700.0 = 2, P0701.0 = 99
P2800 = 1, //使能自由功能塊
P2802.0 = 1, //使能定時器
P2849 = 722.0, P2850 = 0.5, P2851 = 1, //定時器0.5s延時
P0840.0 = 2852.0 // ON/OFF1
這樣設(shè)置后,,變頻器運(yùn)行后,在DIN1上出現(xiàn)持續(xù)時間小于0.5s的低電平干擾,,不會導(dǎo)致變頻器誤停機(jī),。
如果修改上述設(shè)置,讓P2851 = 2,,可以濾除時間相同的正,、負(fù)脈沖。
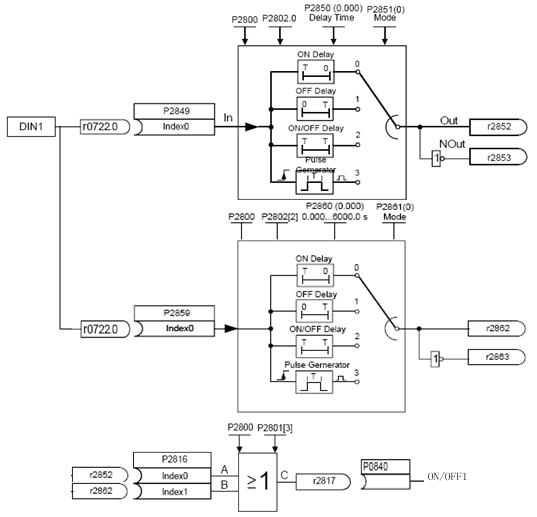
圖3:定時器和“或"門實(shí)現(xiàn)消抖設(shè)置
P0748參數(shù)是一個可以進(jìn)行位設(shè)置的參數(shù),,低3位bit00bit01bit02分別對應(yīng)三個數(shù)字量輸出(繼電器輸出),。修改P0748參數(shù)可以使變頻器的數(shù)字量輸出繼電器的邏輯反相。
參數(shù)七段顯示得結(jié)構(gòu),,各位設(shè)置的定義如下圖所示:
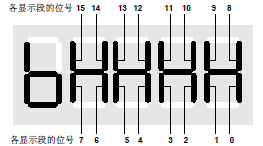
以數(shù)字量輸出1舉例(對于MM440MM430,是端子18,、19和20;對于MM420,,是端子10和11 ),,變頻器的數(shù)字量輸出1默認(rèn)設(shè)置表示故障信號,,默認(rèn)的動作邏輯是:一上電*常開節(jié)點(diǎn)閉合,有故障斷開,。如果要求的邏輯是*斷開,,有故障閉合的話,就需要設(shè)置參數(shù)P0748,,具體方法如下:
找到參數(shù)P0748,,如圖1所示,
圖1
按“ "鍵確認(rèn),,如圖2所示,,
"鍵確認(rèn),,如圖2所示,,
區(qū)分通信故障和信息錯誤:
在診斷參數(shù)r2026-r2031中,可區(qū)分通信故障還是信息中的錯誤,。如果這些值中只有一個在增加,,這說明通信是好的,但信息本身中有錯誤,。如果幾個或所有值都同時增加,,這說明存在由EMC問題引起的通信故障。
各個參數(shù)的重要性在相應(yīng)MICROMASTER類型的手冊“MICROMASTER 4xx 參數(shù)列表"中有詳細(xì)描述,。
識別干擾噪聲:
診斷參數(shù)r2024-r2025表示由干擾噪聲 引起的通信故障,。如果轉(zhuǎn)換器成功接收到信息,r2024就開始計(jì)數(shù),,參數(shù)r2025表示被拒絕的信息數(shù)量,。在正常工作的系統(tǒng)中r2024至少應(yīng)該比r2025的增加速度快五十倍。如果r2025增加的比r2024快,,很可能是信息結(jié)構(gòu)不正確或信息被破壞(例如通過干擾噪聲),。請參照條目! !“如何在S7-200和MICROMASTER 4之間通過端口0建立帶EMC和過壓保護(hù)的通信連接?"來檢查物理總線,。
識別EMC或 偏壓問題:
診斷參數(shù)r2026-r2029表示由EMC或偏壓問題引起的通信故障,。如果所有參數(shù)(r2026至r2029)都增加,就表明有EMC或偏壓問題,。如果偏壓不足,,網(wǎng)絡(luò)就會對干擾噪聲非常敏感。網(wǎng)絡(luò)上的峰值能超出偏壓并作為邏輯“0"被接收,,而這通常表明信息的開始,。可以通過錯誤的啟動位錯誤(由r2029計(jì)數(shù))的增加來識別它,。如何使用示波器來發(fā)現(xiàn)錯誤的偏壓在條目! !“如何使用示波器檢測在RS485接口上的錯誤偏壓,?"中有描述。
 您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)












