西門子6ES7405-0DA02-0AA0
工作原理包括:
·通過反射照明方法檢查對象: 要么僅形狀或僅樣本,,要么形狀和樣本同時
·開始檢查: 通過接口,,如數(shù)字輸入端/輸出端、PROFIBUS 或 PROFINET 和 Ethernet
·通過數(shù)字輸出端或通過 PROFIBUS 或 PROFINET 和 Ethernet 輸出檢查結(jié)果
·憑借其較小的尺寸和可牽引的連接電纜,,也可在系統(tǒng)運行時安裝傳感器頭和照明單元,。
·根據(jù)零件大小,每秒zui多 20 個評估(取決于對象)
·用于不同零件尺寸以及樣本尺寸的三種傳感器頭類型,,防護等級 IP65
德國西門子Siemens變頻器 通用變頻器MM,MMV,MDV系列

HTL/TTL 增量編碼器
SSI 值編碼器(不帶增量)
1 點溫度傳感器輸入(KTY84-130 或 PTC)
背面的 PM IF 接口(功率模塊接口),,用于直接連接模塊型 SINAMICS S120 PM240-2 或 PM340 功率模塊
組裝/安裝
SIMOTION D410-2 可直接插到模塊型 SINAMICS S120 功率模塊中。
或者,,可以將 SIMOTION D410-2 安裝在安裝板(需單獨訂購)上,,然后通過 DRIVE-CLiQ 連接到電源模塊。這種情況下,,必須將 CUA31/CUA32 控制單元適配器連接到電源模塊,。SIMOTION D410-2 只能連接一個控制單元適配器,。
注:
通過 CUA31/CUA32 連接電源模塊時,不能通過內(nèi)置端子(F-DI,、F-DO)使用集成擴展功能,。
在中國市場上我們能碰到的早期的西門子變頻器主要有電流源的SIMOVERT A,以及電壓源的SIMOVERT P,這些變頻器也主要由于設(shè)備的引進而一起進入了中國的市場,,目前仍有少量的使用,,而其后在中國市場大量銷售的主要有MICRO MASTER和MIDI MASTER,以及西門子變頻器zui為成功的一個系列SIMOVERT MASTERDRIVE,也就是我們常說的6SE70系列。它不僅提供了通用場合使用的AC變頻器,,也提供了在造紙,,化纖等特殊行業(yè)要求使用的多電機傳動的直流母線方案。當然西門子也推出了在我個人看來技術(shù)上比較失敗然而在市場上卻相當成功的ECO變頻器,,在技術(shù)上的失敗主要是由于它有太高的故障率,,市場上的成功主要是因為它超越了富士變頻器成為中國市場的品牌。

輸入信號負端與 MANA 的電位差,。
模塊的 UCM 是造成模擬量值超上限的主要原因,。
不同模塊 UCM 的值不同。
UISO : MANA 和 CPU 的 M 端子之間的電位差
3 ,、使用隔離的模擬量模塊連接隔離的傳感器 隔離傳感器與隔離模擬量信號連接圖如圖 1 所示: 圖 1 連接隔離的傳感器至隔離的模擬量輸入模塊 這種方式簡單,, 都與地隔離, 都不需要接地,, 但是輸入信號 (傳感器) 負端與 MANA 電壓超過 UCM 限制,,例如 SM331 ( 6ES7331-7KF02-0AB0 )為 2.5 VDC ,就 需要短接信號負端與 MANA ,,否則會出現(xiàn)超上限問題,。
現(xiàn)場可以查看一下,,幾乎所 有超上限問題都是沒有連接信號負端與 MANA
西門子6ES7405-0DA02-0AA0
說明
使用 S7-400 CPU模塊時,,組織塊是操作系統(tǒng)和用戶程序之間的接口。它們基于中斷或事件被操作系統(tǒng)調(diào)用,。
在訪問過程映像區(qū)時,,在CPU內(nèi),對于訪問該過程映像區(qū)的OB,,其過程映像區(qū)內(nèi)的信號數(shù)據(jù)是一致的,。如果在錯誤或中斷OB在調(diào)用過程中再通過過程映像區(qū)來訪問輸入或者輸出時,同時屬于該 OB 的過程映像區(qū)內(nèi)的值始終有效,。
下表說明如何分配一個過程映像區(qū)給 OB 塊:
| 序號 | 步驟 |
| 1 | 打開 STEP 7 項目的硬件組態(tài),,雙擊希望定義過程映像分區(qū)的模塊。 |
| 2 | 在 "Addresses" 標簽里從下拉列表中選擇過程映像分區(qū)“PIP1”,。 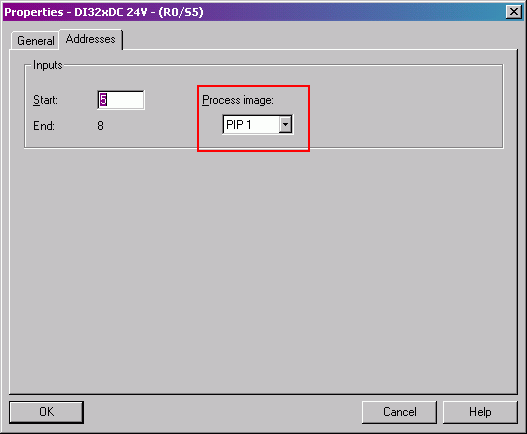
圖 01
|
| 3 | 點擊 OK 關(guān)閉對話框,。然后分配此過程映像分區(qū)給一個 OB 。 |
| 4 | 打開 CPU 的屬性 ,在 "Interrupts" 標簽下分配此過程映像分區(qū)給一個組織塊 ( 如 OB40 ) ,。當這個 OB 被系統(tǒng)調(diào)用時,,PIP1 映像分區(qū)將自動更新。 
圖 02
|
盡管 PIP 一次只能分配給一個 OB,,但每一個 PIP 可以包含多個 I/O 地址或模塊分配,。已經(jīng)分配給過程映像分區(qū)的輸入和輸出地址不再屬于OB1 的輸入和輸出過程映像。對于 OB1 過程映像和所有其它過程映像分區(qū),,所有輸入和輸出地址只能被分配一次,。
此外,還可以在程序的任意位置使用 SFC 26“UPDAT_PI”或 SFC 27“UPDAT_PO”更新過程映像區(qū),,之后該 PIP 可能不會被系統(tǒng)更新,。
注意
一個 PIP 不會自動更新。更新僅在 SFC被調(diào)用或相關(guān)的 OB 啟動/ 結(jié)束時執(zhí)行,。在示例中,,如果 OB 40 被系統(tǒng)調(diào)用,此時相應(yīng)的輸入點會被讀入,。 這些當前值在 OB40 處理過程中作為輸入使用.
時鐘中斷 OB 的過程映像分區(qū)不會被系統(tǒng)更新,,盡管它們被分配給了 OB 塊 (OB61-OB64) 。
以下 STEP 7 在線幫助下有更多關(guān)于過程映像分區(qū)的信息:
- 過程映像輸入/ 輸出表
- 在PROFIBUS DP 上組態(tài)短的和等長的過程響應(yīng)時間
- 分布式讀寫一致性數(shù)據(jù)
上述行為適用于 S7-400 和部分 S7-300 CPU 模塊 ( 如 CPU317 和 CPU319 FW3.2或更高版本 ) ,。CPU S7-317 和 S7-319 只有在 OB61 且沒有其它報警 OB 調(diào)用的時候支持過程映像分區(qū),。過程映像分區(qū)的數(shù)量取決于所用的具體 CPU 型號。
 您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)















