6ES7313-5BF03-0AB0
西門子6es7313-5bf03-0ab0是s7-300,,cpu 313c,, 帶 mpi 的緊湊型 cpu, 24 de/16 da,,4ae,,2aa,,1 pt100, 3 個快速計數(shù)器(30 khz),, 集成電源 24v dc,, 工作存儲器 64 kb, 前連接器(2x 40 極)和 需要微型存儲卡

movepath 功能
按照預先定義好的路徑差補軌跡點表格,,實現(xiàn)路徑軌跡控制,。可以在三維空間預先定義若干個點,,按照這些路徑點去做插補運動,,可以實現(xiàn)常用的拾取 / 堆放工藝。參考圖20 movepath 軌跡,。在軌跡的每一個段落內(nèi),,都可以實現(xiàn)速度變化;在軌跡控制中,,可以定義位置停止點,,支持m 功能輸出,路徑表多支持240個位置點,。

圖20 movepath 軌跡
首先需要使用fb489 “mc_pathselect “ 做路徑軌跡的選擇,,然后調(diào)用功能塊fb488”mc_movepath” 做路徑插補運動。參考圖21 路徑選擇與運動,。必須首先調(diào)用“mc_pathselect” 工藝功能選擇插補點數(shù)據(jù),,同時定義路徑段,數(shù)值為1-5,,數(shù)值寫入輸入?yún)?shù)segment,,然后將其裝入到t-cpu 的technology內(nèi)核中。使用該technology內(nèi)核可存儲5條路徑段,。工藝功能“mc_movepath” 允許一個路徑對象沿著一條路徑段運動的同時,,通過工藝功能“mc_pathselect”準備好其他路徑段。
可以使用 udt 121創(chuàng)建路徑點db “pathdata”,, “pathdata” 使用指針形式 any-pointer,,每一個路徑點占用 22 byte,每個路徑表多由240個路徑點組成,。參考圖22 生成路徑表,。

圖21 路徑選擇與運動
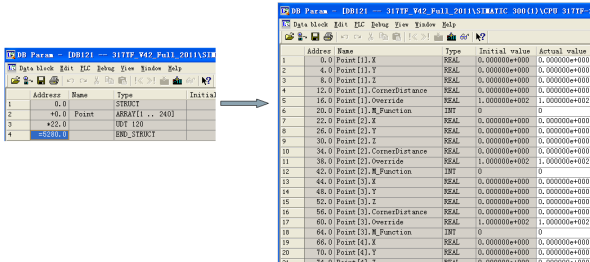
圖22 生成路徑表
在路徑表中,point[x].x,、point[x].y,、point[x].z 分別指x,y,z坐標,point[x].cornerdistance表示直線在插補點之間的圓弧轉(zhuǎn)換和帶沖擊限制的多項式轉(zhuǎn)換的角距離(real),,根據(jù)pathdeion (3或11)選擇轉(zhuǎn)換模式,。對于小于0.0的值,,路徑對象的運動在相關(guān)停止點被中斷。參考圖23 插補點轉(zhuǎn)換,。point[x].override表示速度替換值/速度校正值(real) ,,取值范圍從0.0%到200%,。參考圖24 速度校正,。對于沿著路徑段的雙向運動,速度曲線是一致的,。point[x].m_function表示用戶自定義功能碼(int) ,,對應(yīng)mc_movepath的輸出參數(shù)code輸出值。創(chuàng)建路徑點db “pathdata”在程序中的調(diào)用請參考圖25 路徑表調(diào)用,。
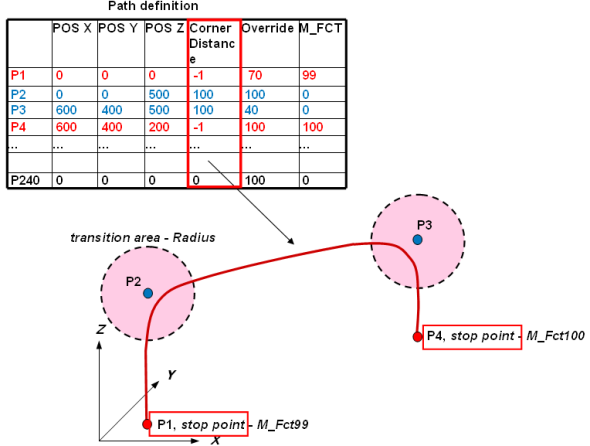
圖23 插補點轉(zhuǎn)換

圖24 速度校正
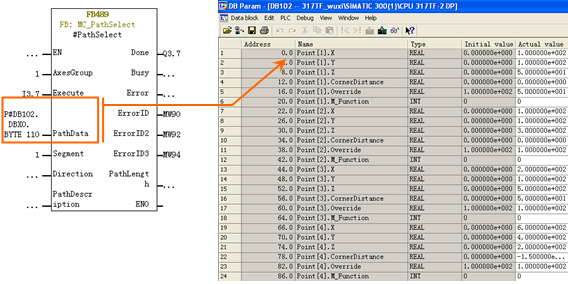
圖25 路徑表調(diào)用
按照圖25 所示的路徑表,,執(zhí)行“mc_movepath”后,三個軸同時到達(600,,400,,200)的坐標位置,參考圖26 movepath trace 曲線,。
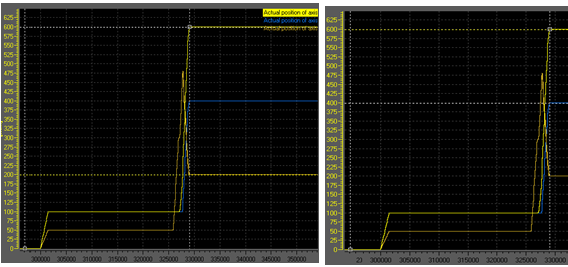
圖26 movepath trace 曲線
3.2 直線插補,、圓弧插補和多項式插補
t-cpu 可以通過功能塊實現(xiàn)空間三維的直線插補、圓弧插補和多項式插補,,相關(guān)功能塊有fb484 “mc_movelinearabsolute”,,fb485 “mc_movelinearrelative”,fb 486 "mc_movecircularabsolute",,fb 487 "mc_movecircularrelative",,fb 490 “mc_movepolynomabsolute”,fb 491”mc_movepolynomrelative”,。另外還有一個圓周運動
能塊fb 496 "mc_movecircles",。參考圖27 路徑插補基本功能。
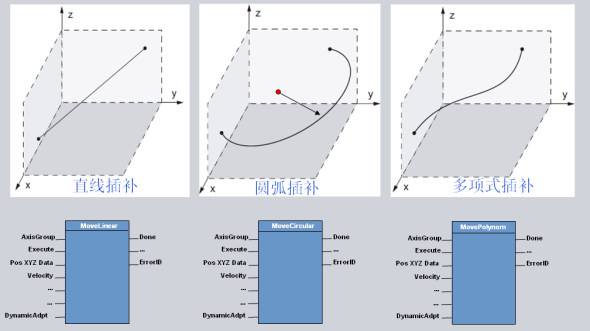
圖27 路徑插補基本功能
3.2.1 直線插補
fb484 “mc_movelinearabsolute”工藝功能使路徑對象沿著一條線性路徑移動到一個絕
對目標位置,。目標位置在三維空間,。命令中的輸入?yún)?shù)axesgroup 寫入路徑對象的工藝db 塊號;position 寫入目標位置的坐標地址,,該地址的數(shù)據(jù)結(jié)構(gòu)由”s7-tech”庫中的udt42 創(chuàng)建,;velocity , jerk, acceleration和 deceleration允許路徑對象的動態(tài)值;根據(jù)輸入?yún)?shù)coordsystem,,可以參照基礎(chǔ)坐標系或目標坐標系,;輸入?yún)?shù)buffermode允許是否用新的運動取代當前運動,或?qū)⑿碌倪\動添加在當前運動之后,,或?qū)⑿碌倪\動與當前運動混合再附加在當前運動之后,;輸入?yún)?shù)transitionmode允運動混合的類型,;輸入?yún)?shù)transitionparameter混合類型的相關(guān)參數(shù)(轉(zhuǎn)彎半徑)。參考圖28 fb484,。

圖28 fb484
其中,,buffermode取值有0、1,、2,,transitionmode取值有0、3,、10,、11,具體的運動軌跡可以參考圖29 buffermode與transitionmode的作用,。
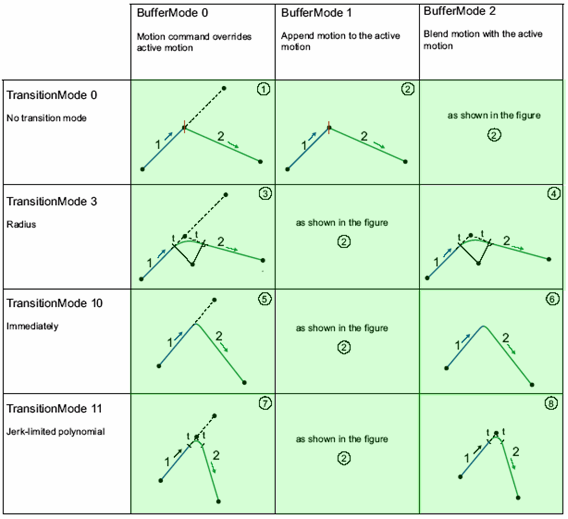
圖29 buffermode與transitionmode的作用
在該圖中,,對于模式 ①,立即執(zhí)行新的運動指令,,有停頓,;對于模式 ②,等待舊指令完成后執(zhí)行新指令,,有停頓,;對于模式 ③,立即執(zhí)行新的指令,,通過的轉(zhuǎn)彎半徑切換,,無停頓;對于模式 ④,,等待舊指令完成后,,通過的轉(zhuǎn)彎半徑執(zhí)行新指令,無停頓,;對于模式 ⑤,,立即執(zhí)行新的指令,無停頓,,拐點沖擊較大,;對于模式 ⑥,等待舊指令完成后執(zhí)行新指令,,無停頓,,拐點沖擊較大;對于模式 ⑦,,立即執(zhí)行新的指令,,通過多項式曲線切換,無停頓,,減小拐點沖擊,;對于模式 ⑧,,等待舊指令完成后,通過多項式曲線切換到新指令,,無停頓,,減小拐點沖擊。
如果將目標位置坐標定義為(100,,100,,50),參考圖30 目標位置,,則觸發(fā)fb484 后,,各軸同時到達(100,,100,,50)的目標位置,參考圖31 線性運動軌跡,。
,、

圖30 目標位置

圖31 線性運動trace曲線
fb485 “mc_movelinearrelative” 工藝功能使路徑對象沿著一條線性路徑移動一段相對距離。該距離在三維空間,,由輸入?yún)?shù)distance 寫入,,該變量的數(shù)據(jù)結(jié)構(gòu)由”s7-tech”庫中的udt42 創(chuàng)建;運動命令中的輸入?yún)?shù)velocity , jerk, acceleration和 deceleration允許路徑對象的動態(tài)值,;根據(jù)輸入?yún)?shù)coordsystem,,可以參照基礎(chǔ)坐標系或目標坐標系;輸入?yún)?shù)buffermode允許是否用新的運動取代當前運動,,或?qū)⑿碌倪\動添加在當前運動之后,,或?qū)⑿碌倪\動與當前運動混合再附加在當前運動之后;輸入?yún)?shù)transitionmode混合類型的相關(guān)參數(shù)(轉(zhuǎn)彎半徑),。參考圖32 fb485,。
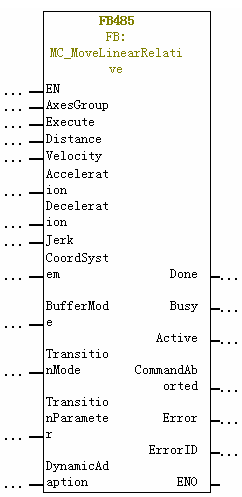
圖32 fb485
舉例說明buffermode和transitionmode 對運動軌跡的影響。參考圖33 兩次觸發(fā)fb485,,首先觸發(fā)fb485進行線性相對運動,,在目標位置還未到達時,觸發(fā)另外一個fb485進行線性相對運動,,時序圖參考圖34 線性相對運動時序圖,。由于fb485 buffermode和transitionmode均設(shè)置為0,則根據(jù)圖29 可得出,,第二次fb485觸發(fā)后,,軸將減速,向之前設(shè)定位置的運動停止下來,,并立即執(zhí)行新的運動指令,,終到達新的目標位置,。運動軌跡參考圖 35 線性運動軌跡。
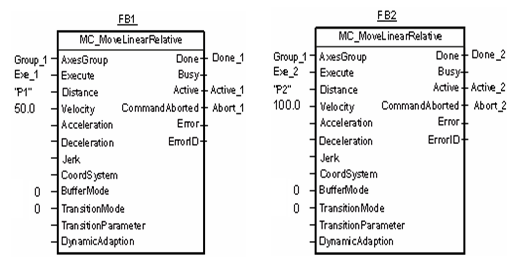
圖33 兩次觸發(fā)fb485
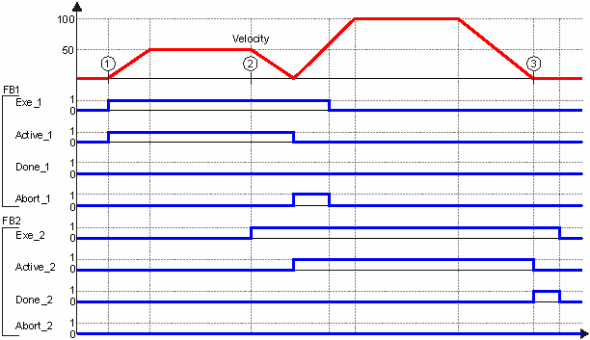
圖34 線性相對運動時序圖

圖35 線性運動軌跡
3.2.2 圓弧插補
fb486“mc_movecircularabsolute”工藝功能使路徑對象沿著一條圓弧路徑移動到一個目標位置,。目標位置在三維空間,。參考圖36 fb486,輸入?yún)?shù)axesgroup 寫入路徑對象的工藝db 塊號,,auxpoint,、endpoint 由udt42 創(chuàng)建的db塊來;velocity 路徑對象的運行速度,,acceleration 運行對象的加速度,,deceleration 運行對象的減速度,jerk運行對象的加加速,。圓弧路徑可由輸入?yún)?shù)circmode定義,,circmode為 0 時,用起點,、中間點和終點定義圓弧路徑,,參考圖37 circmode為 0;circmode為 1時,,用起點,、圓心點和終點定義圓弧路徑,參考圖38 circmode為 1,。通過pathchoice 來沿長弧運行或者沿短弧運行,。

圖36 fb486
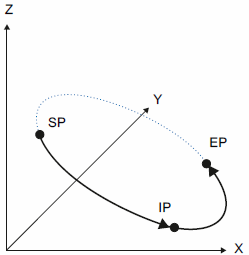
圖37 circmode為 0
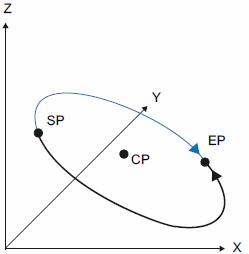
圖38 circmode為 1
buffermode 的值為0,則替代當前的運動,,值為1則附加當前的運動,,值為2 則覆蓋當前的運動,默認值為0,。在圖39 中,,路徑對象先做線性運動,在運動過程中,,觸發(fā)圓弧插補,,則當前的線性運動運動中止,軸減速停止然后執(zhí)行圓弧插補運動,。時序圖參考圖40圓弧插補時序圖,,運行軌跡參考圖41圓弧插補軌跡。

圖39 圓弧插補
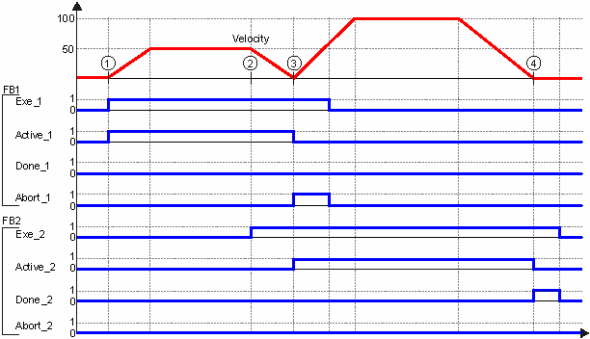
圖40 圓弧插補時序圖
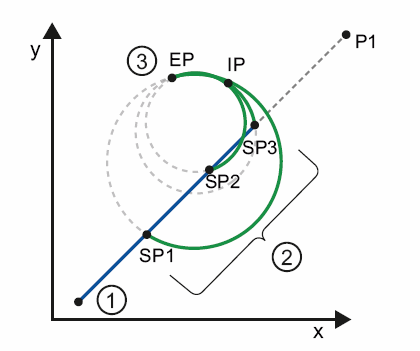
圖41 圓弧插補軌跡
例如,,將中間點坐標設(shè)置為(100,,80,60),終點坐標設(shè)置為(200,,160,,120),需要建立兩個db塊,,db塊的數(shù)據(jù)類型選擇udt42,,將x, y, z坐標填入對應(yīng)的db塊中,參考圖42 坐標點定義,。在功能塊fb486 中去調(diào)用這兩個功能塊,,參考圖43 調(diào)用坐標點。
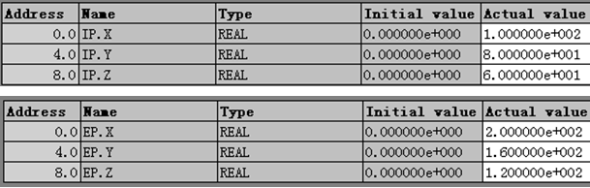
圖42 坐標點定義

圖43 調(diào)用坐標點
正確執(zhí)行該功能塊后,,可用trace功能查看各軸的位置曲線,,參考圖44,三個軸在同一時刻分別到達各自坐標位置(200,,160,,120)。
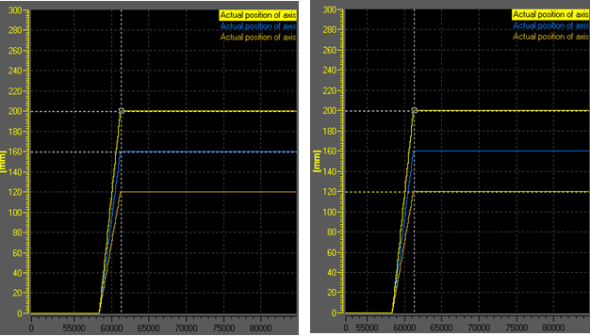
圖44 圓弧插補trace 曲線
fb487 “mc_movecircularrelative”工藝功能使路徑對象沿著一條圓弧路徑移動到一個相對于起點的目標位置,。目標位置在三維空間,,參考圖45 fb487。velocity 路徑對象的運行速度,,acceleration運行對象的加速度,deceleration運行對象的減速度,,jerk運行對象的加加速,。circmode 圓弧路徑模式,值為0時,,可以通過定義起始點,、相對中間點和相對終點來定義圓弧,;值為1時,,通過定義起始點、相對圓心和相對終點來定義圓弧,,通過pathchoice 來沿長弧運行或者沿短弧運行,。

圖45 fb487
在圖46 中,路徑對象先做線性運動,,在運動過程中,,觸發(fā)相對圓弧插補,buffermode 為1,,則立即執(zhí)行相對圓弧插補運動,,circmode為1,則按照起始點、相對圓心,、相對終點來定義圓弧,,pathchoice為1,則運動沿長弧段執(zhí)行,。時序圖參考圖47相對圓弧插補時序圖,,運行軌跡參考圖48相對圓弧插補軌跡。
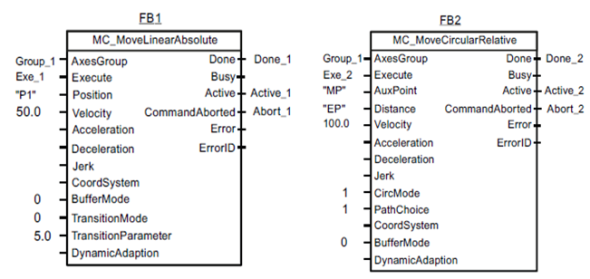
圖46 相對圓弧插補
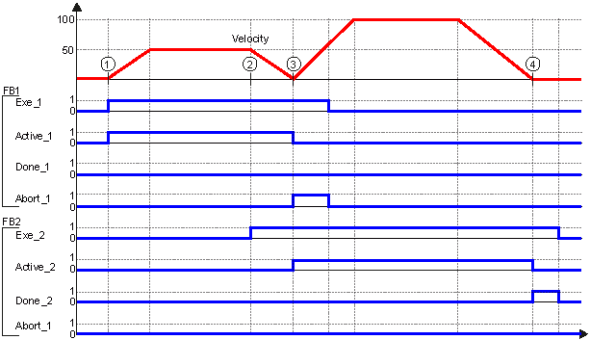
圖47相對圓弧插補時序圖
SIMATIC S7-300可編程控制器
模塊化中小型PLC系統(tǒng),,能滿足中等性能要求的應(yīng)用:
*大范圍的各種功能模塊可以非常好地滿足和適應(yīng)自動控制任務(wù) *由于簡單實用的分散式結(jié)構(gòu)和多界面網(wǎng)絡(luò)能力,,使得應(yīng)用十分靈活 *方便用戶和簡易的無風扇設(shè)計 *當控制任務(wù)增加時,可自由擴展 *由于大范圍的集成功能使得它功能非常強勁
SIMATIC S7-300可編程控制器訂貨型號:
6ES7312-1AE10-0AB0 CPU312,,16K 工作內(nèi)存,,位操作時間0.2μs,DI/DO *大256 點,,AI/AO *大64
6ES7314-1AG13-0AB0 CPU314,,64K 工作內(nèi)存,位操作時間0.1μs,,DI/DO *大1024 點,,AI/AO *大256
6ES7315-2AG10-0AB0 CPU315-2DP,128K 工作內(nèi)存,,位操作時間0.1μs,,PROFIBUS-DP 主/ 從接口,DI/DO *大16384 點 (集中式1024 點),,AI/AO *大1024 點(集中式256 點)
6ES7315-2EH13-0AB0 CPU315-2PN/DP,,128K 工作內(nèi)存,位操作時間0.1μs,,PROFIBUS-DP 主/ 從接口,,PROFINET 接口DI/DO *大 16384 點(集中式1024 點),AI/AO *大1024 點(集中式256 點)
6ES7317-2AJ10-0AB0 CPU317-2DP,,512K 工作內(nèi)存,,位操作時間0.05μs,PROFIBUS-DP 主/ 從接口,,DI/DO *大65536 點 (集中式1024 點),,AI/AO *大4096 點(集中式256 點)
6ES7317-2EK13-0AB0 CPU317-2PN/DP,512K 工作內(nèi)存,,位操作時間0.05μs,,PROFIBUS-DP 主/ 從接口,PROFINET 接口DI/DO *大65536 點(集中式1024 點),,AI/AO *大4096 點(集中式256 點)
6ES7318-2AJ00-0AB0 CPU318-2DP,,512K 工作內(nèi)存,,位操作時間0.1μs,PROFIBUS-DP 主/ 從接口,,DI/DO *大65536 點 (集中式1024 點),,AI/AO *大4096 點(集中式256 點)
6ES7315-6FF01-0AB0 CPU315F-2DP, 故障安全型,,128K 工作內(nèi)存,,位操作時間0.1μs,PROFIBUS-DP 主/ 從接口,,DI/DO *大 16384 點(集中式1024 點),,AI/AO *大1024 點(集中式256 點)
6ES7317-6FF03-0AB0 CPU317F-2DP, 故障安全型,,512K 工作內(nèi)存,,位操作時間0.05μs,PROFIBUS-DP 主/ 從接口,,DI/DO *大 65536 點(集中式1024 點),,AI/AO *大4096 點(集中式256 點)
6ES7312-5BE03-0AB0 CPU312C,16K 工作內(nèi)存,,位操作時間0.2μs,,集成10DI/6DO,2 通道高速計數(shù),,2 通道PWM 輸出,,2 通道頻率測量, PID 調(diào)節(jié),;DI/DO *大256 點,,AI/AO *大64 點,1 個40 針前連接器(另購)
6ES7313-5BF03-0AB0 CPU313C,,32K 工作內(nèi)存,位操作時間0.1μs,,集成24DI/16DO,,4AI/2AO,3 通道高速計數(shù),,2 通道PWM 輸出,, 2 通道頻率測量,PID 調(diào)節(jié),;DI/DO *大1016/1008 點,,AI/AO *大253/250 點,2 個40 針前連接器(另購)
6ES7313-6CF03-0AB0 CPU313C-2DP,,32K 工作內(nèi)存,,位操作時間0.1μs,PROFIBUS-DP 主/ 從接口,集成16DI/16DO,,3 通道高速計數(shù),, 2 通道PWM 輸出,2 通道頻率測量,,PID 調(diào)節(jié),;DI/DO *大1008 點,AI/AO *大248 點,,1 個40 針前連接器(另購)
6ES7313-6BF03-0AB0 CPU313C-2PtP,,32K 工作內(nèi)存,位操作時間0.1μs,,RS485 點對點接口,,集成16DI/16DO,3 通道高速計數(shù),, 2 通道PWM 輸出,,2 通道頻率測量,PID 調(diào)節(jié),;DI/DO *大1008 點,,AI/AO *大248 點,1 個40 針前連接器(另購)
6ES7314-6CG03-0AB0 CPU314C-2DP,,64K 工作內(nèi)存,,位操作時間0.1μs,PROFIBUS-DP 主/ 從接口,,集成24DI/16DO,,4AI/2AO, 4 通道高速計數(shù),,4 通道PWM 輸出,,4 通道頻率測量,PID 調(diào)節(jié),一軸定位功能,;DI/DO *大1016/1008 點,, AI/AO *大253/250 點,2個40 針前連接器(另購)
6ES7314-6BG03-0AB0 CPU314C-2PtP,,64K 工作內(nèi)存,,位操作時間0.1μs,RS485 點對點接口,,集成24DI/16DO,,4AI/2AO, 4 通道高速計數(shù),,4 通道PWM 輸出,,4 通道頻率測量,,PID 調(diào)節(jié),一軸定位功能;DI/DO *大1016/1008 點,, AI/AO *大253/250 點,,2個40 針前連接器

 您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)















