 您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)

西門子PLC控制器6ES7313-6CG04-0AB0現(xiàn)貨供應(yīng)
西門子PLC控制器6ES7313-6CG04-0AB0
MC指令稱為主控指令,又名公共串聯(lián)觸點(diǎn)的連接指令,,用于表示主控區(qū)的開始,該指令的操作元件為Y ,、M(不包括特殊輔助繼電器),。
MCR指令稱為主控復(fù)位指令,又名公共串聯(lián)觸點(diǎn)的清除指令,,用于表示主控區(qū)的結(jié)束,,該指令的操作元件為主控指令的使用次數(shù)N(N0~N7)。 如圖12-3所示,。當(dāng)X0接通時,,執(zhí)行MC到MCR的指令,當(dāng)X0斷開時,,累積定時器,、計數(shù)器、用置位/復(fù)位指令驅(qū)動的軟元件保持當(dāng)時的狀態(tài),,非累積定時器,、計數(shù)器、用OUT指令驅(qū)動的軟元件變?yōu)閿嚅_狀態(tài),。
在MC指令內(nèi)使用MC指令稱為嵌套,,在有嵌套結(jié)構(gòu)時,嵌套層數(shù)N的編號從N0~N7依次增大,。在沒有嵌套結(jié)構(gòu)時,,可再次使用N0編制程序,,N0的使用次數(shù)無限,。

西門子S7-1200 PLC在當(dāng)前的市場中有著廣泛的應(yīng)用,作為常與變頻器共同使用的PLC,,其與西門子MM440 變頻器的USS通信一直在市場上有著非常廣泛的應(yīng)用。本文將主要介紹如何使用USS通信協(xié)議來實(shí)現(xiàn)S7-1200與MM440變頻器的通信,。
1. USS通信介紹
1.1. USS協(xié)議特點(diǎn)
USS (Universal Serial Interface, 即通用串行通信接口) 是西門子專為驅(qū)動裝置開發(fā)的通信協(xié)議。USS 協(xié)議的基本特點(diǎn)如下:
? 支持多點(diǎn)通信(因而可以應(yīng)用在 RS 485 等網(wǎng)絡(luò)上)
? 采用單主站的“主-從"訪問機(jī)制
? 每個網(wǎng)絡(luò)上多可以有 32 個節(jié)點(diǎn)(多 31 個從站)
? 簡單可靠的報文格式,,使數(shù)據(jù)傳輸靈活高效
? 容易實(shí)現(xiàn),,成本較低
USS 的工作機(jī)制是,通信總是由主站發(fā)起,,USS 主站不斷循環(huán)輪詢各個從站,從站根據(jù)收到的指令,,決定是否以及如何響應(yīng)。從站永遠(yuǎn)不會主動發(fā)送數(shù)據(jù),。從站在以下條件滿足時應(yīng)答:
-- 接收到的主站報文沒有錯誤,并且
-- 本從站在接收到主站報文中被尋址
上述條件不滿足,,或者主站發(fā)出的是廣播報文,從站不會做任何響應(yīng),。對于主站來說,從站必須在接收到主站報文之后的一定時間內(nèi)發(fā)回響應(yīng),。否則主站將視為出錯。
USS 的字符傳輸格式符合 UART 規(guī)范,,即使用串行異步傳輸方式。USS 在串行數(shù)據(jù)總線上的字符傳輸幀為 11 位長度,,如表1所示:

表1:USS字符幀
USS 協(xié)議的報文簡潔可靠,高效靈活,。報文由一連串的字符組成,協(xié)議中定義了它們的特
定功能,,表2所示:

表2:USS報文結(jié)構(gòu)
每小格代表一個字符(字節(jié))。其中:
STX: 起始字符,,總是 02 h
LGE: 報文長度
ADR:從站地址及報文類型
BCC: BCC 校驗(yàn)符
凈數(shù)據(jù)區(qū)由 PKW 區(qū)和 PZD 區(qū)組成,如表3所示:

表3:USS凈數(shù)據(jù)區(qū)
PKW: 此區(qū)域用于讀寫參數(shù)值,、參數(shù)定義或參數(shù)描述文本,,并可修改和報告參數(shù)的改變 。其中:
PKE: 參數(shù) ID,。包括代表主站指令和從站響應(yīng)的信息,以及參數(shù)號等
IND: 參數(shù)索引,,主要用于與 PKE 配合定位參數(shù)
PWEm:參數(shù)值數(shù)據(jù)
PZD: 此區(qū)域用于在主站和從站之間傳遞控制和過程數(shù)據(jù)??刂茀?shù)按設(shè)定好的固定格式在主、從站之間對應(yīng)往返,。如:
PZD1:主站發(fā)給從站的控制字/從站返回主站的狀態(tài)字
PZD2: 主站發(fā)給從站的給定/從站返回主站的實(shí)際反饋
根據(jù)傳輸?shù)臄?shù)據(jù)類型和驅(qū)動裝置的不同,,PKW 和 PZD 區(qū)的數(shù)據(jù)長度都不是固定的,,它們可以靈活改變以適應(yīng)具體的需要,。但是,,在用于與控制器通信的自動控制任務(wù)時,網(wǎng)絡(luò)上的所有節(jié)點(diǎn)都要按相同的設(shè)定工作,,并且在整個工作過程中不能隨意改變。
注意:
對于不同的驅(qū)動裝置和工作模式,,PKW 和 PZD 的長度可以按一定規(guī)律定義。 一旦確定就不能在運(yùn)行中隨意改變 ,;
PKW 可以訪問所有對 USS 通信開放的參數(shù),;而 PZD 僅能訪問特定的控制和過程數(shù)據(jù),;
PKW 在許多驅(qū)動裝置中是作為后臺任務(wù)處理,因此 PZD 的實(shí)時性要比 PKW 好,。
1.2. S7-1200 USS通信簡介
CM 1241 RS485 模塊通過 RS485 端口與MM440進(jìn)行通信。 可使用 USS 庫控制MM440和讀/寫MM440參數(shù),。該庫提供 1 個 FB 和 3 個 FC 來支持 USS 協(xié)議。 每個 CM1241 RS485 通信模塊多支持 16 個MM440,。連接到一個 CM 1241 RS485 的所有MM440(多 16 個)是同一 USS 網(wǎng)絡(luò)的一部分。連接到另一 CM 1241 RS485 的所有MM440是另一 USS 網(wǎng)絡(luò)的一部分,。 因?yàn)?S7-1200多支持三個 CM 1241 RS485 設(shè)備,,所以用戶多可建立三個 USS 網(wǎng)絡(luò),,每個網(wǎng)絡(luò)多 16 個MM440,總共支持 48 個 USS MM440,。各 USS 網(wǎng)絡(luò)使用各自的數(shù)據(jù)塊進(jìn)行管理(使用三個 CM 1241 RS485 設(shè)備建立三個 USS網(wǎng)絡(luò)需要三個數(shù)據(jù)塊)。 同一USS 網(wǎng)絡(luò)相關(guān)的所有指令必須共享該數(shù)據(jù)塊,。 這包括用于控制網(wǎng)絡(luò)上所有MM440的 USS_DRV、USS_PORT,、USS_RPM 和USS_WPM 指令,。
2. 硬件需求及接線
2.1. 硬件需求
S7-1200 PLC目前有3種類型的CPU:
1)S7-1211C CPU,。
2)S7-1212C CPU,。
3)S7-1214C CPU。
這三種類型的CPU都可以使用USS通信協(xié)議通過通信模塊CM1241 RS485來實(shí)現(xiàn)S7-1200與MM440變頻器的通信,。
本例中使用的PLC硬件為:
1) S7-1214C ( 6ES7 214 -1BE30 -0XB0 )
2) CM1241 RS485 ( 6ES7 241 -1Cspan0 -0XB0 )
3) CSM 1277 ( 6GK7 277 -1AA00 - 0AA0)
本例中使用的MM440變頻器硬件為:
1) MM440 ( 6SE6440 - 2AB11 - 2AA1 )
2) MICROMASTER 4 ENCODER MODULE ( 6SE6400 - 0EN00 - 0AA0 )
3) SIEMENS MOTOR ( 1LA7060 - 4AB10 - Z )
4) USS 通信電纜 ( 6XV1830 - 0EH10 )
2.2. 接線
建議使用西門子的網(wǎng)絡(luò)插頭和PROFIBUS電纜,。在 S7-1200 CPU 通信口上使用西門子網(wǎng)絡(luò)插頭。
PROFIBUS 電纜的紅色導(dǎo)線B 即 RS 485 信號 +,,此信號應(yīng)當(dāng)連接到 MM 440 通信端口的 P+,;綠色導(dǎo)線A 即 RS 485 信號 -,此信號應(yīng)當(dāng)連接到 MM 440 通信端口的 N-,。
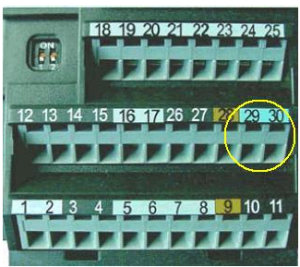

圖1: MM440接線端子 表4:MM440端子定義
因?yàn)镸M 440 通信口是端子連接,所以 PROFIBUS 電纜不需要網(wǎng)絡(luò)插頭,,而是剝出線頭直接壓在端子上,。如果還要連接下一個驅(qū)動裝置,則兩條電纜的同色芯線可以壓在同一個端子內(nèi),。PROFIBUS 電纜的紅色芯線應(yīng)當(dāng)壓入端子 29,;綠色芯線應(yīng)當(dāng)連接到端子 30,,如圖1、表4所示,。完整接線圖如圖2所示,。

圖2: