 您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)

西門子CPU中央控制單元6ES7211-0BA23-0XB0價格優(yōu)勢
西門子CPU中央控制單元6ES7211-0BA23-0XB0
底板或機架
大多數(shù)模塊化plc采用基板或機架,其功能是實現(xiàn)模塊之間的電氣連接,使CPU可以訪問基板上的所有模塊,并實現(xiàn)模塊之間的機械連接,使模塊成為一個整體,。
7.PLC系統(tǒng)的其他設(shè)備
1、編程設(shè)備:編程器是PLC開發(fā)應(yīng)用、監(jiān)控運行,、檢查維護(hù)*的設(shè)備。用于編程,、設(shè)置系統(tǒng),、監(jiān)控PLC及PLC控制系統(tǒng)的工作狀態(tài),但不直接參與現(xiàn)場控制操作,。小程序員PLC一般都有手持編程器,,目前一般都是電腦充當(dāng)編程器。
2 ,、人機系統(tǒng)界面:簡單工作的人機界面是指示燈和按鈕,,目前液晶屏式的一體式操作員終端技術(shù)應(yīng)用研究越來越受到廣泛,由計算機可以充當(dāng)人機界面(interface)設(shè)計非常普及,。
3,、輸入輸出設(shè)備:用于存儲用戶數(shù)據(jù),如EPROM,、EEPROM寫入器,、條形碼閱讀器、輸入模擬電位器(Analog potentiometer),、打印機等,。
八、PLC的通信網(wǎng)絡(luò)
依靠*的工業(yè)網(wǎng)絡(luò)技術(shù),,可以快速有效地采集和傳輸生產(chǎn)管理數(shù)據(jù),,因此,網(wǎng)絡(luò)在自動化系統(tǒng)集成(Automation system integration)工程中的重要性越來越重要,,甚至有人提出“網(wǎng)絡(luò)就是控制器"的觀點,。
PLC具有通信和網(wǎng)絡(luò)功能,可以實現(xiàn) plc 與 plc 之間、 plc 與上位機及其它智能設(shè)備之間的信息交換,,形成一個統(tǒng)一的整體,,實現(xiàn)分散集中控制,大多數(shù) plc 都有 rs-232接口,,有些還有內(nèi)置接口來支持各自的通信協(xié)議,。
PLC的通信還沒有實現(xiàn)互操作性,IEC規(guī)定了多種現(xiàn)場總線標(biāo)準(zhǔn),,所有PLC廠商都采用,, 對于我們一個企業(yè)自動化工程 特別是中大規(guī)模控制管理系統(tǒng) 來講,,選擇通過網(wǎng)絡(luò)發(fā)展非常具有重要的,,首先,網(wǎng)絡(luò)信息必須是開放的,,以方便不同設(shè)備的集成及未來社會系統(tǒng)規(guī)模的擴展;其次,,針對這些不同國家網(wǎng)絡(luò)層次的傳輸性能要求,選擇網(wǎng)絡(luò)的形式,,這必須在較深入地了解該網(wǎng)絡(luò)課程標(biāo)準(zhǔn)的協(xié)議、機制的前提下可以進(jìn)行,,再次,,綜合考慮系統(tǒng)開發(fā)成本、設(shè)備兼容性,、現(xiàn)場工作環(huán)境適用性等具體實際問題,,確定研究不同需求層次所使用的網(wǎng)絡(luò)服務(wù)標(biāo)準(zhǔn)。


注意:如果在數(shù)據(jù)塊中定義了某地址的數(shù)據(jù),,而又使用這種辦法存儲同樣地址的數(shù)據(jù),,則當(dāng)CPU內(nèi)超級電容或電池沒電時,CPU再上電時將采用SMB31和SMW32存儲的數(shù)據(jù),。
問題8:EEPROM寫入次數(shù)的統(tǒng)計,?
回答:每次下載程序塊/數(shù)據(jù)塊/系統(tǒng)塊或者執(zhí)行一次SMB31.7置位的操作都算作對EEPROM的一次寫操作,所以請注意在程序中一定不要每周期都調(diào)用SMB31/SMW32用于將數(shù)據(jù)寫入EEPROM內(nèi),,否則CPU將很快報廢,。
問題9:不使用數(shù)據(jù)塊的方法,如何在程序中實現(xiàn)不止一個V區(qū)數(shù)據(jù)的存儲,?
回答:由于SMB31/SMW32一次多只能送入一個V區(qū)雙字給EEPROM區(qū)域,,因而當(dāng)有超過一個雙字的數(shù)據(jù)需要送入EEPROM中時,需要程序配合實現(xiàn),。具體操作方法可參照如下的例子,,即使用SMB31/SMW32送完一個數(shù)據(jù)(字節(jié)/字/雙字)之后,通過一個標(biāo)志位(如M0.0)來觸發(fā)下一個SMB31/SMW32操作,之后需要將上一個標(biāo)志位清零,,以用于下一次的存儲數(shù)據(jù)的操作,。


由于SM31.7在每次操作結(jié)束之后都自動復(fù)位,因而不能使用它作為第二次觸發(fā)操作的條件,。
以上程序僅供參考,。
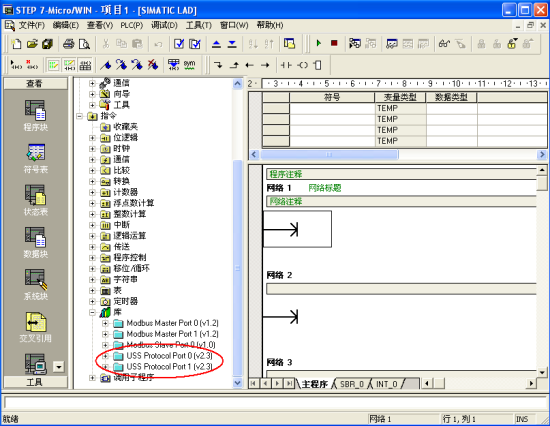
、在使用MicroWin software 創(chuàng)建項目之前,,確認(rèn)USS庫文件已經(jīng)安裝:
3,、創(chuàng)建一個例程:
3.1 設(shè)置通訊接口
本例程使用PC/PPI電纜。

3.2 建立PC和PLC之間的連接
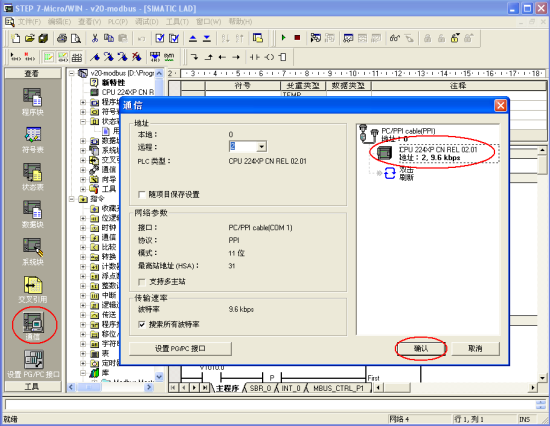
“雙擊刷新"搜索到PLC后,,點擊"確認(rèn)",。
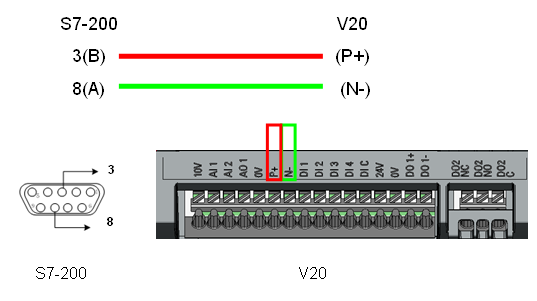
3.3 用電纜將S7-200 Port 0端口與V20的RS485接口相連(注意端口連接規(guī)則:V20的
P+對3、N-對8),,如下圖所示:
3.4 變頻器參數(shù)設(shè)置:
V20 可以通過選擇連接宏Cn010實現(xiàn)USS控制,,也可以通過直接更改變頻器參數(shù)的方法來實現(xiàn)。參數(shù)設(shè)置如下表所示:
表一:
| 參數(shù) | 描述 | Cn010默認(rèn)值 | 實際設(shè)置 | 備注 |
| P0700[0] | 選擇命令源 | 5 | 5 | RS485為命令源 |
| P1000[0] | 選擇頻率 | 5 | 5 | RS485為速度設(shè)定值 |
| P2023 | RS485協(xié)議選擇 | 1 | 1 | USS協(xié)議 |
| P2010[0] | USS/MODBUS波特率 | 8 | 6 | 波特率為9600bps |
| P2011[0] | USS地址 | 1 | 3 | 變頻器的USS地址 |
| P2012[0] | USS PZD長度 | 2 | 2 | PZD部分的字?jǐn)?shù) |
| P2013[0] | USS PKW長度 | 127 | 127 | PKW部分字?jǐn)?shù)可變 |
| P2014[0] | USS/MODBUS報文間斷時間 | 500 | 0 | 接收數(shù)據(jù)時間 |
3.5 使用USS協(xié)議的初始化模塊初始化S7-200的PORT0端口:
EN使能:每次改變通訊狀態(tài)都應(yīng)該執(zhí)行一次初始化指令,。所以EN信號應(yīng)該通過邊沿檢測元件脈沖激活,。
Mode:用這個USS輸入值選擇通訊協(xié)議。
1:為端口0USS協(xié)議,,并啟用該協(xié)議,。
0:為端口0PPI協(xié)議,并禁止USS協(xié)議,。
Baud: 波特率:9600,,19200…115200。
Active:激活驅(qū)動地址,。
Done:當(dāng)USS_INIT 指令執(zhí)行完成后,,Done=1。
Error:指令執(zhí)行的結(jié)果,,如果有錯誤,,顯示錯誤代碼。
Active:激活驅(qū)動地址舉例:
3.6 使用USS——CTRL模塊來控制USS地址為3的變頻器,,為了運行變頻器需要按照表一設(shè)置參數(shù):
狀態(tài)表:
功能塊定義:
EN:通常情況總是激活,。
RUN:指示驅(qū)動為啟用(1),或禁止(0),。
OFF2:允許V20自由停車,。
OFF3:允許V20快速停止。
F _ACK:V2*復(fù)位,。
DIR:V20轉(zhuǎn)動方向(0:逆時針,;1:順時針),。
Drive:V20地址 0-31。
Speed:速度給定值,,以全速的百分比給出 (-200.0~~200.0%,,負(fù)值時,V20反向),。
Resp_R:輪詢V20,,掃描時=1,并更新下面值,。
Error:錯誤字節(jié),,參見表:USS指令執(zhí)行錯誤。
Status:V20返回狀態(tài)值,。
Speed:V20速度,,(-200.0~~200.0%)。
Run_EN:V20運行狀態(tài)(1:運行,;0:停止),。
D_DIR:V20轉(zhuǎn)動方向(0:逆時針;1:順時針)
Inhibit:V20禁止位狀態(tài),。 (0:啟用,;1:禁止)。要清除禁止位,,必須將Fault清零,,
RUN,OFF2,, OFF3輸入也要清零,。
Fault:指示故障狀態(tài),。根據(jù)V2*表確認(rèn)故障,。故障排除后,置位F _ACK使Fault
清零,。
表二:Error 信息
| Error代碼 | 說明 |
| 0 | 沒有錯誤 |
| 1 | 驅(qū)動未響應(yīng) |
| 2 | 檢測到驅(qū)動響應(yīng)中存在校驗和錯誤 |
| 3 | 檢測到驅(qū)動響應(yīng)中存在奇偶校驗錯誤 |
| 4 | 由于用戶程序干擾導(dǎo)致出錯 |
| 5 | 嘗試執(zhí)行了無效命令 |
| 6 | 提供的驅(qū)動地址無效 |
| 7 | 該通訊接口不能實現(xiàn)USS協(xié)議 |
| 8 | 該通訊接口正在忙于處理指令 |
| 9 | 驅(qū)動速度輸入溢出 |
| 10 | 驅(qū)動響應(yīng)的長度不正確 |
| 11 | 驅(qū)動響應(yīng)的首字符不正確 |
| 12 | 驅(qū)動響應(yīng)的長度字符不正確 |
| 13 | 驅(qū)動響應(yīng)錯誤 |
| 14 | 給出的DB_PTR地址不正確 |
| 15 | 給出的參數(shù)號不正確 |
| 16 | 選擇了無效的協(xié)議 |
| 17 | 啟用USS:不允許更改 |
| 18 | 了無效的波特率 |
| 19 | 無通訊:驅(qū)動未激活 |
| 20 | 驅(qū)動響應(yīng)中的參數(shù)或值不正確 |
圖5
注意:如果在數(shù)據(jù)塊中定義了某地址的數(shù)據(jù),,而又使用這種辦法存儲同樣地址的數(shù)據(jù),則當(dāng)CPU內(nèi)超級電容或電池沒電時,,CPU再上電時將采用SMB31和SMW32存儲的數(shù)據(jù),。
問題8:EEPROM寫入次數(shù)的統(tǒng)計?
回答:每次下載程序塊/數(shù)據(jù)塊/系統(tǒng)塊或者執(zhí)行一次SMB31.7置位的操作都算作對EEPROM的一次寫操作,,所以請注意在程序中一定不要每周期都調(diào)用SMB31/SMW32用于將數(shù)據(jù)寫入EEPROM內(nèi),,否則CPU將很快報廢。
問題9:不使用數(shù)據(jù)塊的方法,,如何在程序中實現(xiàn)不止一個V區(qū)數(shù)據(jù)的存儲,?
回答:由于SMB31/SMW32一次多只能送入一個V區(qū)雙字給EEPROM區(qū)域,,因而當(dāng)有超過一個雙字的數(shù)據(jù)需要送入EEPROM中時,需要程序配合實現(xiàn),。具體操作方法可參照如下的例子,,即使用SMB31/SMW32送完一個數(shù)據(jù)(字節(jié)/字/雙字)之后,通過一個標(biāo)志位(如M0.0)來觸發(fā)下一個SMB31/SMW32操作,,之后需要將上一個標(biāo)志位清零,,以用于下一次的存儲數(shù)據(jù)的操作。
由于SM31.7在每次操作結(jié)束之后都自動復(fù)位,,因而不能使用它作為第二次觸發(fā)操作的條件,。
以上程序僅供參考。