 您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)

西門子速度控制的兩種方法
西門子PLC S7-200 SMART 控制 V90 PN速度控制的兩種方法
從STEP 7-Micro/WIN SMART V2.4 和 S7-200 SMART PLC(固件版本 V2.4)開始增加了 PROFINET通信的功能,,通過PROFINET接口可與V90 PN伺服驅(qū)動器進行通信連接進行速度控制,,此接口可支持八個連接(IO 設備或驅(qū)動器),。實現(xiàn)的方法主要有以下兩種:
1. V90使用1號標準報文,,PLC通過調(diào)試軟件中提供的SINAMICS庫功能塊SINA_SPEED對V90PN進行速度控制,。
2. V90使用1號標準報文,,不使用任何程序塊,利用報文的控制字和狀態(tài)字通過編程進行控制,,使用這種方式需要對報文結(jié)構(gòu)比較熟悉。
需要安裝的軟件:
• STEP 7-Micro/WIN SMART V2.4 調(diào)試軟件
• STEP 7 Micro/WIN V2.4 SINAMIC control 庫更新工具
• SINAMICS V-ASSISTANT 軟件
V90 PN配置要點
• 設置控制模式為"速度控制(S)"
• 配置標準通信報文1(P922=1)
• V90在線后點擊"設置PROFINET->配置網(wǎng)絡",,設置V90的IP地址及設備名稱:注意:設置的設備名稱一定要與200 SMART項目中配置的相同,。
參數(shù)保存后需重啟驅(qū)動器才能生效。
方法一 使用標準報文1和SINA_SPEED功能塊
V90 PN與PLC采用PROFINET RT通信方式并使用報文1,,項目步驟如下:
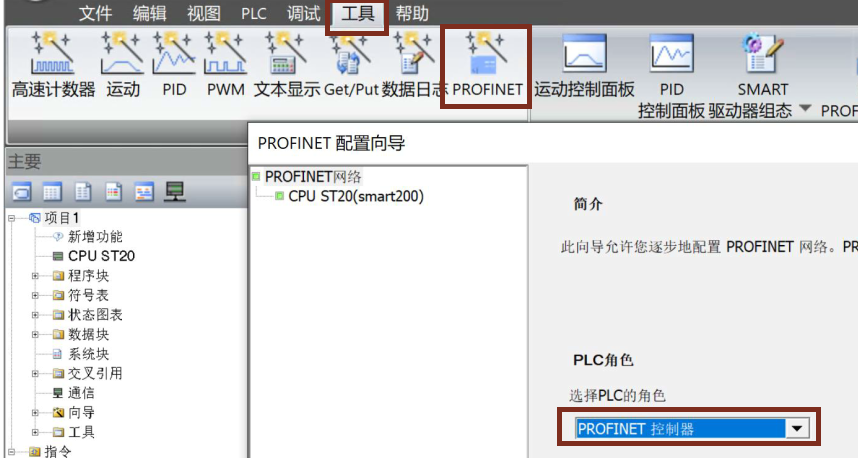
1. 創(chuàng)建項目后,,安裝V90 PN的GSD文件。V90GSD文件下載鏈接如下:

2. 選擇PLC為PROFINET控制器
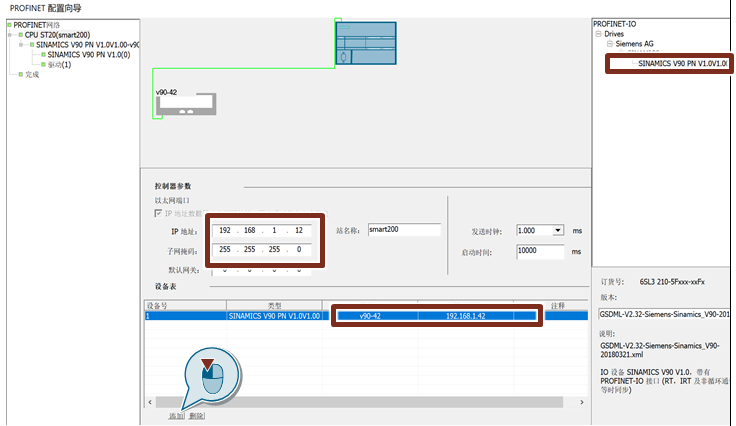
3. 設置PLC的IP地址,,并且添加V90 PN驅(qū)動器,,設置驅(qū)動器IP地址和設備名稱
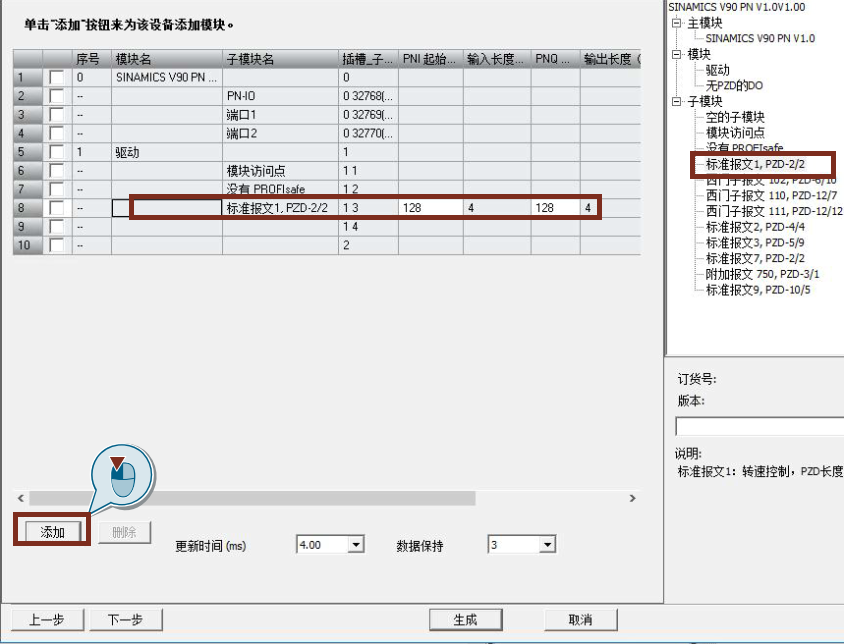
4. 在配置報文的視圖中添加標準報文1到模塊列表中,*小的更新時間為4 ms
5. 編寫程序,,注意St_I_add和St_Q_add的地址必須和報文1的IO地址對應
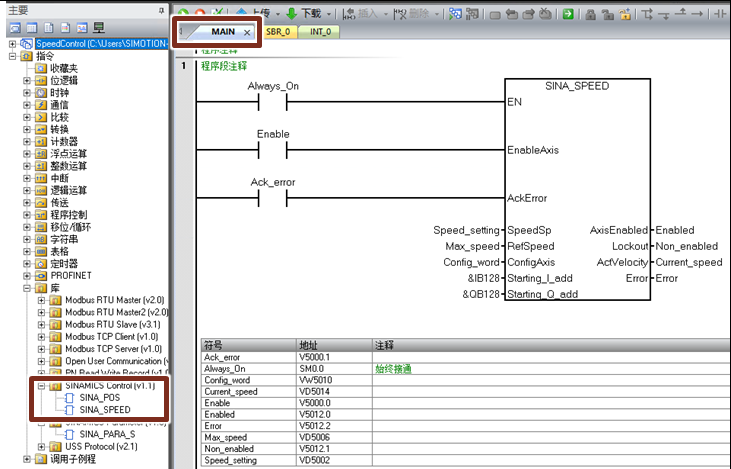
6. 分配程序庫使用的V地址區(qū)

7. SINA_SPEED功能塊輸入輸出參數(shù)說明
輸入?yún)?shù):
| 輸入信號 | 類型 | 含義 |
|---|---|---|
| EnableAxis | BOOL | =1,,驅(qū)動使能 |
| AckError | BOOL | 驅(qū)動故障應答 |
| SpeedSp | REAL | 轉(zhuǎn)速設定值[rpm] |
| RefSpeed | REAL | 驅(qū)動的參考轉(zhuǎn)速[rpm],對應于驅(qū)動器中的p2000參數(shù) |
| ConfigAxis | WORD | 默認設置為16#003F,,說明參看下表 |
| Starting_I_add | DWORD | V90 PN I 存儲區(qū)起始地址的指針 |
| Starting_Q_add | DWORD | V90 PN Q 存儲區(qū)起始地址的指針 |
ConfigAxis的各位說明:
| 位 | 默認值 | 含義 |
|---|---|---|
| 位0 | 1 | OFF2 |
| 位1 | 1 | OFF3 |
| 位2 | 1 | 驅(qū)動器使能 |
| 位3 | 1 | 使能/禁止斜坡函數(shù)發(fā)生器使能 |
| 位4 | 1 | 繼續(xù)/凍結(jié)斜坡函數(shù)發(fā)生器使能 |
| 位5 | 1 | 轉(zhuǎn)速設定值使能 |
| 位6 | 0 | 打開抱閘 |
| 位7 | 0 | 速度設定值反向 |
| 位8 | 0 | 電動電位計升速 |
| 位9 | 0 | 電動電位計降速 |
輸出參數(shù):
| 輸出信號 | 類型 | 含義 |
|---|---|---|
| AxisEnabled | BOOL | 驅(qū)動已使能 |
| LockOut | BOOL | 驅(qū)動處于禁止接通狀態(tài) |
| ActVelocity | REAL | 實際速度[rpm] |
| Error | BOOL | 1=存在錯誤 |
方法二 PLC通過IO地址直接控制V90 PN
此種控制方式無需的程序塊,,直接給定速度。V90使用標準報文1,,項目及網(wǎng)絡配置步驟與方法一相同,。通過對輸出的**個控制字進行驅(qū)動器的起停控制,、第二個控制字可以電機運行的速度,。
V90對應的輸出地址可從設備視圖中查看:

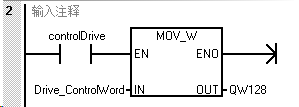
在主程序中調(diào)用MOV_W命令,發(fā)送對驅(qū)動的控制字及速度給定:
1. 通過**個控制字進行驅(qū)動器的起??刂疲?6#047E->16#047F)
2. 通過第二個控制字可以電機運行的速度(十六進制16#4000,,即十進制的16384對應 p2000 速度參數(shù)值)
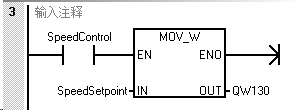
例如,V90 PN的p2000=3000rpm,,如果SpeedSetpoint設置為十進制的8192(即十六進制的16#2000),,則表示速度給定為1500rpm。