 您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)

西門子6ES7 212-1BE40-0XB0現(xiàn)貨供應
西門子6ES7 212-1BE40-0XB0
PID運算
PID運算是FB58的運算核心,,主要通過對偏差信號(設(shè)定值SP_INT-過程值PV)進行比例、積分,、微分運算來得到對閥門,、變頻器等執(zhí)行機構(gòu)的控制信號。具體流圖如下圖所示:
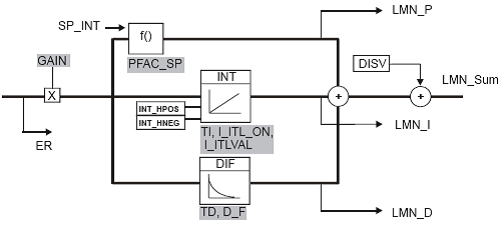
圖7 PID運算流程
從上述流程圖中有如下幾點信息:
- 比例,、積分和微分都是對比例和增益參數(shù)的乘積之積的運算,,其在時間域上的表達式為:

- 特殊地,在積分時間TI和微分時間TD為0的時候,,積分作用和微分作用被取消激活,,此時為純比例控制;
- 對于反作用方式,,需要將增益GAIN設(shè)置為負數(shù),;
- PFAC_SP為比例弱化功能。在設(shè)定值SP_INT發(fā)生階躍變化時,,設(shè)置比例因子PFAC_SP,,從而達到減弱因為設(shè)定值修改而導致的不穩(wěn)定,該比例因子PFAC_SP的取值范圍是0.0~1.0,;
- 對于積分作用,,在I_ITL_ON為1的時候,積分結(jié)果就是I_ITLVAL,;
- 積分功能中的INT_HPOS和INT_HNEG參數(shù)為正向積分功能保持和反向積分功能保持,,如果此時偏差ER和增益GAIN的乘積為正,且INT_HPOS為True,,那么此次運算周期中積分的增加量為0,,即積分項LMN_I的輸出不會改變,。INT_HNEG的作用與此類似。
- 微分功能中的D_F參數(shù)是微分因子,,在微分運算中和周期時間CYCLE作用類似,。
2.4 手動/自動切換
FB58的手動/自動切換是通過參數(shù)MAN_ON來完成的,在MAN_ON為True的時候,,PID處在手動工作狀態(tài),,此時,手動值通過參數(shù)MAN給出,。

圖8 控制輸出
默認情況下,,LMN_HLM和LMN_LLM分別是100.0和0.0,從上圖中可以看出,,手動值的有效數(shù)值范圍也應該是0.0~100.0,。
在參數(shù)MAN_ON為False的情況下,PID投入運行,,控制回路處于自動工作狀態(tài),。
為了降低手動/自動切換過程中擾動,算法通過如下措施來實現(xiàn)無擾切換:
- 在自動的狀態(tài)下,,比例和積分的運算結(jié)果之和會寫入到單元MAN中,,這樣在由自動切換到手動的過程中不會引起控制輸出波動;
- 在手動的狀態(tài)下,,積分項的輸出等于MAN的值減去比例項的值(偏差ER*增益Gain),,而在自動狀態(tài)中,積分項是一個累計的結(jié)果,,這樣在切換到自動狀態(tài)時積分項不會有太大的突變,。
從上面的分析可以知道,F(xiàn)B58已經(jīng)集成了相應的無擾切換的功能,,不需要編寫額外的程序來實現(xiàn),。
2.5 保存和重新裝載參數(shù)
保存和重新裝載控制器參數(shù)是FB58中的新功能,主要用來實現(xiàn)在多套參數(shù)之間的切換,。
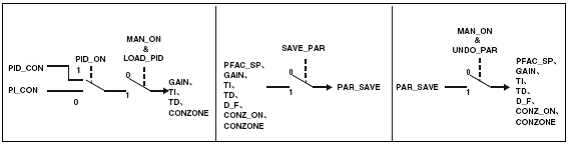
圖9 控制參數(shù)保存和重新裝載
從上圖中可以看出,,控制參數(shù)的處理有三種方式:
(1)從PID_CON/PI_CON中裝載
要實現(xiàn)此裝載,,必須滿足如下幾種條件:
手動控制狀態(tài)(MAN_ON=True),;
PID_CON.GAIN或者PI_CON.GAIN不為0;
LOAD_PID為1
如果參數(shù)PID_ON為1,,則從PID_CON中裝載如下參數(shù):
GAIN,、TI、TD,,并計算CONZONE=250.0/GAIN
如果參數(shù)PID_ON為0,,則從PI_CON中裝載如下參數(shù):
GAIN,、TI,、TD,,并計算CONZONE=250.0/GAIN。特殊地,,此時會關(guān)閉控制帶功能,,即設(shè)置CON_ZONE參數(shù)為0,并讓微分參數(shù)TD設(shè)置為0.0,。
裝載完成之后,,參數(shù)LOAD_PID會自動復位。
值得注意的是,,如果PID_CON中保存的增益參數(shù)PID_CON.GAIN為0,,則自動會修改PID_ON為0,并轉(zhuǎn)而從PI_CON中獲取參數(shù),。
注:PID_CON/PI_CON中的參數(shù)來自于自整定過程,。
(2)保存參數(shù)
保存參數(shù)可以在任何工作狀態(tài)下進行,,只需設(shè)置參數(shù)SAVE_PAR為1即可,。可以將如下參數(shù)保存找PAR_SAVE結(jié)構(gòu)體中:
PFAC_SP,、GAIN,、TI、TD,、D_F,、CONZ_ON、CON_ZONE
在保存結(jié)束之后,,參數(shù)位SAVE_PAR會自動復位,。
(3)重新裝載參數(shù)
重新裝載是“保存參數(shù)"的逆過程,,但其執(zhí)行是需要條件的:
手動控制狀態(tài)(MAN_ON=True),;
PAR_SAVE.GAIN不為0;
參數(shù)UNDO_PAR為1,。
在重新裝載完成之后,,參數(shù)UNDO_PAR會自動復位。
3 高級功能