 您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)

西門子CPU 6ES7214-1BG40-0XB0型號規(guī)格
西門子CPU 6ES7214-1BG40-0XB0型號規(guī)格
可包括以下三種壞同類型設備:
?、?nbsp;一級DP主站(DPM1):一級DP主站是中央控制器,,它在預定的周期內(nèi)與分散的站(如DP從站)交換信息。典型的DPM1如PLC或PC,。
?、?nbsp;二級DP主站(DPM2):二級DP主站是編程器.組態(tài)設備或操作面板,,在DP系統(tǒng)組態(tài)操作時使用,,完成系統(tǒng)操作和監(jiān)視目的,。
③ DP從站:DP從站是進行輸入和輸出信息采集和發(fā)送的外圍設備(I/O設備.驅動器.HMI.閥門等),。
?、?nbsp;單主站系統(tǒng):在總線系統(tǒng)的運行階段,只有一個活動主站,。
?、?nbsp;多主站系統(tǒng):總線上連有多個主站,。這些主站與各自從站構成相互獨立的子系統(tǒng),。每個子系統(tǒng)包括一個DPMI.的若干從站及可能的DPM2設備。任何一個主站均可讀取DP從站的輸入/輸出映象,,但只有一個DP主站允許對DP從站寫入數(shù)據(jù),。
(3)
系統(tǒng)行為
系統(tǒng)行為主要取決于DPM1的操作狀態(tài),,這此狀態(tài)由本地或總線的配置設備所控制。主要有以下三種狀態(tài):
·停止:在這種狀態(tài)下,,DPM1和DP從站之間沒有數(shù)據(jù)傳輸,。
·清除:在這種狀態(tài)下,DPM1讀取DP從站的輸入信息并使輸出信息保持在故障安全狀態(tài),。
·運行:在這種狀態(tài)下,,DPM1處于數(shù)據(jù)傳輸階段,循環(huán)數(shù)據(jù)通信時,DPM1從DP站讀取輸入信息并向從站寫入輸出信息,。
?、?nbsp;DPM1設備在一個預先設定的時間間隔內(nèi),以有選擇的廣播方式將其本地狀態(tài)周期性地發(fā)送到每一個有關的DP從站,。
?、?nbsp;如果在DPM1的數(shù)據(jù)傳輸階段中發(fā)生錯誤,DPM1將所有有關的DP從站的輸出數(shù)據(jù)立即轉入清除狀態(tài),,而DP從站將不在發(fā)送用戶數(shù)據(jù),。在次之后,DPM1轉入清除狀態(tài)。
矢量控制(VC)方式
矢量控制變頻調速的做法是將異步電動機在三相坐標系下的定子電流Ia,、Ib,、Ic、通過三相-二相變換,,等效成兩相靜止坐標系下的交流電流Ia1Ib1,,再通過按轉子磁場定向旋轉變換,等效成同步旋轉坐標系下的直流電流Im1,、It1(Im1相當于直流電動機的勵磁電流,;It1相當于與轉矩成正比的電樞電流),然后模仿直流電動機的控制方法,,求得直流電動機的控制量,,經(jīng)過相應的坐標反變換,實現(xiàn)對異步電動機的控制,。其實質是將交流電動機等效為直流電動機,,分別對速度,磁場兩個分量進行獨立控制,。通過控制轉子磁鏈,,然后分解定子電流而獲得轉矩和磁場兩個分量,經(jīng)坐標變換,,實現(xiàn)正交或解耦控制,。矢量控制方法的提出具有劃時代的意義。然而在實際應用中,,由于轉子磁鏈難以準確觀測,,系統(tǒng)特性受電動機參數(shù)的影響較大,,且在等效直流電動機控制過程中所用矢量旋轉變換較復雜,使得實際的控制效果難以達到理想分析的結果,。
直接轉矩控制(DTC)方式
1985年,,德國魯爾大學的DePenbrock教授*提出了直接轉矩控制變頻技術。該技術在很大程度上解決了上述矢量控制的不足,,并以新穎的控制思想,、簡潔明了的系統(tǒng)結構、優(yōu)良的動靜態(tài)性能得到了迅速發(fā)展,。目前,,該技術已成功地應用在電力機車牽引的大功率交流傳動上。 直接轉矩控制直接在定子坐標系下分析交流電動機的數(shù)學模型,,控制電動機的磁鏈和轉矩,。它不需要將交流電動機等效為直流電動機,因而省去了矢量旋轉變換中的許多復雜計算,;它不需要模仿直流電動機的控制,,也不需要為解耦而簡化交流電動機的數(shù)學模型。
矩陣式交—交控制方式
VVVF變頻,、矢量控制變頻,、直接轉矩控制變頻都是交—直—交變頻中的一種。其共同缺點是輸入功率因數(shù)低,,諧波電流大,,直流電路需要大的儲能電容,再生能量又不能反饋回電網(wǎng),,即不能進行四象限運行,。為此,矩陣式交—交變頻應運而生,。由于矩陣式交—交變頻省去了中間直流環(huán)節(jié),,從而省去了體積大、價格貴的電解電容,。它能實現(xiàn)功率因數(shù)為l,,輸入電流為正弦且能四象限運行,系統(tǒng)的功率密度大,。該技術目前雖尚未成熟,,但仍吸引著眾多的學者深入研究。其實質不是間接的控制電流,、磁鏈等量,,而是把轉矩直接作為被控制量來實現(xiàn)的。具體方法是:
——控制定子磁鏈引入定子磁鏈觀測器,實現(xiàn)無速度傳感器方式,;
——自動識別(ID)依靠的電機數(shù)學模型,,對電機參數(shù)自動識別,;
——算出實際值對應定子阻抗,、互感、磁飽和因素,、慣量等算出實際的轉矩,、定子磁鏈、轉子速度進行實時控制,;
——實現(xiàn)Band—Band控制按磁鏈和轉矩的Band—Band控制產(chǎn)生PWM信號,,對逆變器開關狀態(tài)進行控制。
矩陣式交—交變頻具有快速的轉矩響應(<2ms),,很高的速度精度(±2%,,無PG反饋),高轉矩精度(<+3%),;同時還具有較高的起動轉矩及高轉矩精度,,尤其在低速時(包括0速度時),可輸出150%~200%轉矩,。
當M0.0上升沿使能時,,將寫入的參數(shù)從MB100~MB166傳遞到輸入地址為100開始的模板,修改其數(shù)據(jù)記錄1的參數(shù),,同時也將參比接點的溫度也寫入模板的設定位置,。
表11 各參數(shù)的說明
4. 熱電偶的信號處理方式
4.1 硬件組態(tài)設置
首先要在硬件組態(tài)選擇與外部補償接線一致的measuring type(測量類型),measuring range(測量范圍),,reference junction(參比接點類型)和reference temperature(參比接點溫度)的參數(shù),,如下各圖所示。
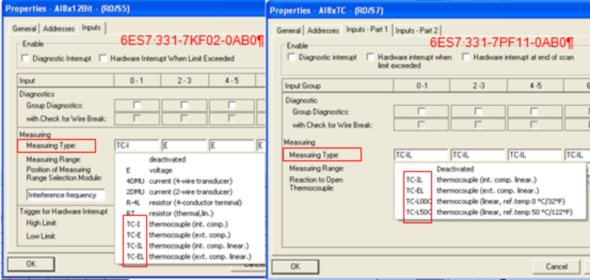
圖10 S7-300模板測量方式示意圖
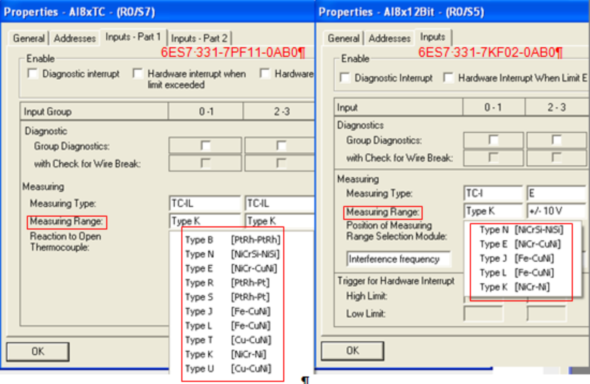
圖11 S7-300模板測量范圍示意圖
對于S7-300的模板,,組態(tài)如圖10和11所示,,只需要選擇測量類型和測量范圍(分度類型),補償方式包含在測量類型中,。比如: 參比接點固定溫度補償方式,,測量類型選擇 TC-L00C(參比接點溫度固定為0℃) 或 TC-L50C(參比接點溫度固定為50℃),再選擇分度類型,,組態(tài)就完成,。

圖12 S7-400模板組態(tài)圖1
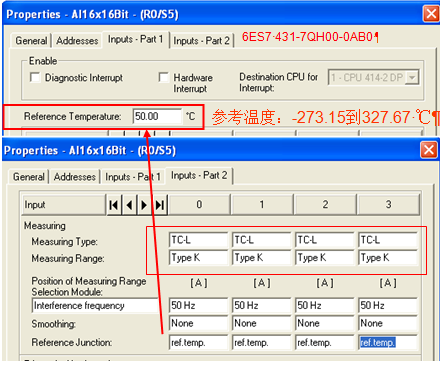
圖13 S7-400模板組態(tài)圖2
對于S7-400的模板,組態(tài)如圖12和13所示,,測量類型中選擇TC-L方式,,測量范圍中選擇與實際熱電偶類型一致的分度號,參比接點的選擇。比如:參比接點固定溫度的方式,,測量類型和測量范圍選擇完后,,在參比接點選擇ref.temp(參考溫度),然后在reference temperature框(參考溫度)內(nèi)填寫參比接點的固定,,組態(tài)就完成,,或者是共享補償方式,可以用SFC55動態(tài)傳輸溫度參數(shù),。
表13 測量方式各參數(shù)的說明及處理
注:測量方式中:I :內(nèi)部補償,,E:外部補償,L:線性處理,。
線性化方式(TC-IL/EL/L00C/L50C/L)
線性化方式下,,由模板內(nèi)部根據(jù)所選擇的熱電偶類型的特性進行線性處理,可以使用L PIW xxx 直接讀入,,則將獲得十進制的溫度值,,精度為0.1。例如:讀進來的 十進制值為2345,,則對應的溫度值為234.5℃,。
非線性化方式(TC-I/E)
對于非線性化的設置,此設置類似80Mv的電壓測量,,CPU得到的是0~27648之間的一個十進制數(shù)值,,即0~80Mv 對應0~27648,需要轉換成相應Mv信號,,然后通過對照表查找溫度,。
綜上所述,如果想得到所測的溫度值,,選擇線性化方式的設置比較方便,;如果僅需要得到Mv信號,可以選擇非線性化方式的設置