西門子NCU數(shù)控主板6FC5357-0BB25-0AA0
用技術(shù)變量進(jìn)行軸診斷
例如,在調(diào)試過程中改變軸的參數(shù)時(shí),,跟蹤函數(shù)S7T Config可提供廣泛的支持,。
為了有效的實(shí)現(xiàn)跟蹤函數(shù),例如通過不同的設(shè)定值和真實(shí)值,,建議您對(duì)CPU 31xT的設(shè)定值通道和控制結(jié)構(gòu)有概括的了解,。在此概述中演示了技術(shù)變量在哪里以及如何處理,。
設(shè)定值通道
通常在疊加函數(shù)的情況下,設(shè)定值是由不同的組件構(gòu)成 的,。當(dāng)然,決定性的問題是,,例如,,對(duì)跟蹤記錄是否分析其基本運(yùn)動(dòng),疊加運(yùn)動(dòng)或所導(dǎo)致的整體運(yùn)動(dòng),。
通?;具\(yùn)動(dòng)的變量是在結(jié)構(gòu)“basicMotion"中,而疊加運(yùn)動(dòng)的變量在結(jié)構(gòu)“superimposedMotion"中,。作為結(jié)果的設(shè)定值位置在結(jié)構(gòu)“positioningState"中,;速度和加速度在結(jié)構(gòu)“motionState"中。
這些值會(huì)在運(yùn)行系統(tǒng)級(jí)的IPO周期中更新(插補(bǔ)周期),。
圖 1:設(shè)定值通道中的技術(shù)變量
對(duì)活動(dòng)的軸運(yùn)動(dòng)的功能塊作用于設(shè)定值通道的不同點(diǎn),。
基本函數(shù)
包含所有定位作業(yè)(例如:MC_MoveAbsolute)。它們只作用于軸的基本運(yùn)動(dòng),。當(dāng)啟動(dòng)一個(gè)基本函數(shù)時(shí),,所有運(yùn)行的基本和疊加作業(yè)都會(huì)終止。然后平穩(wěn)過渡到新作業(yè),。當(dāng)疊加運(yùn)動(dòng)中止時(shí),,所有疊加變量的位置,速度和加速度的當(dāng)前值都 被用來計(jì)算basicMotion的啟動(dòng)條件中,。
疊加函數(shù)
只有FB MC_MoveSuperImposed,。此函數(shù)的啟動(dòng)對(duì)運(yùn)行的基本函數(shù)沒有影響。
在基本系統(tǒng)中的同步操作
基本系統(tǒng)中同步操作的FB用來啟動(dòng),,改變或終止驅(qū)動(dòng)器或凸輪的同步操作,。這里設(shè)定值不直接在軸里而是在的同步操作對(duì)象中被影響。從那里輸入軸的basicMotion結(jié)構(gòu),。當(dāng)在基本系統(tǒng)中啟動(dòng)同步操作時(shí),,所有運(yùn)行的運(yùn)動(dòng)由于基本函數(shù)而被終止。
在疊加系統(tǒng)中的同步操作
疊加同步操作函數(shù)對(duì)第二個(gè)同步操作對(duì)象有影響,。當(dāng)啟動(dòng)這樣一個(gè)函數(shù)時(shí),,它對(duì)基本函數(shù)沒有影響。但運(yùn)行的MC_MoveSuperImposed作業(yè)被取代,。
當(dāng)作業(yè)被取代時(shí)的上述現(xiàn)象是標(biāo)準(zhǔn)設(shè)置,,它可通過特殊應(yīng)用的專家列表更改,。
控制結(jié)構(gòu)
軸位置控制所需的函數(shù)在運(yùn)行系統(tǒng)級(jí)“Servo"中運(yùn)行。分析所需的變量主要在結(jié)構(gòu)“servodata"中,。
取決于所使用的驅(qū)動(dòng)器,有兩個(gè)位置控制步驟可用:
位置控制發(fā)生在CPU中,。由于通信延時(shí)在位置控制循環(huán)中有長的停止時(shí)間,。
所連接的驅(qū)動(dòng)器支持DSC程序。這里位置控制發(fā)生在驅(qū)動(dòng)器中,。使用這一程序也可實(shí)現(xiàn)高動(dòng)態(tài)的應(yīng)用。
對(duì)于CPU 317T或CPU 315T,,由于驅(qū)動(dòng)器只是通過PROFIBUS進(jìn)行分散的連接,,必須考慮通信延時(shí)。由此在CPU中,,設(shè)定值和實(shí)際位置總是來自不同的掃描時(shí)間。這兩個(gè)值的簡(jiǎn)單不同不能給出 實(shí)際跟蹤誤差,。
伺服塊(圖2)將設(shè)定值作為輸入。在此簡(jiǎn)化視圖中,,未考慮一般限制和過濾器函數(shù),。

圖2:CPU中的位置控制(簡(jiǎn)化結(jié)構(gòu))
設(shè)定值位置可包含針對(duì)相關(guān)軸DB或結(jié)構(gòu)positioningState的變量的偏移。如果在運(yùn)行操作中設(shè)置或修正位置值,,偏移量就會(huì)改變,因?yàn)闆]有在伺服塊中使用 位置修正,。
速度預(yù)控值來自設(shè)定值位置和kpc加權(quán)的區(qū)別(.NumberOfDataSets.DataSet1.ControllerStruct.PV_Controller.kpc),。補(bǔ)償值也可開始作用,例如通過摩擦補(bǔ)償(臨時(shí) 的補(bǔ)充設(shè)定值以克服靜態(tài)摩擦),。
為了檢查預(yù)控或正確縮放的效果,可以大量減小位置控制的影響,。為此必須將位置控制增益kv設(shè)置到非常低的值。這個(gè)測(cè)試程序不考慮位置控制發(fā)生在CPU還是驅(qū)動(dòng)器中,。
位置設(shè)定值通過一個(gè)對(duì)稱過濾器,其對(duì)標(biāo)準(zhǔn)應(yīng)用的過濾時(shí)間常數(shù)設(shè)定為非常小幾乎就是無效的值(<< 20ms),。 使用此過濾器可以優(yōu)化高速動(dòng)態(tài)應(yīng)用中位置控制的過火行為,。過濾器只在使用預(yù)控制時(shí)有效。
CPU中的位置控制
如果位置控制發(fā)生在CPU中,,那么位置控制器(servodata.ControllerOutput)的輸出就是位置差servodata.controllerDifference和位置控制增益kv的結(jié)果。位置控制器的輸出被加入到預(yù)控制 ,,并作為速度設(shè)定值傳遞到驅(qū)動(dòng)器,。
DSC過程
在DSC過程中(圖 3 )速度預(yù)控(NSOLL_B),位置控制增益(KPC)以及設(shè)定值位置和實(shí)際位置(XERR)間的差異作為位置控制的相關(guān)信號(hào)被發(fā)送到驅(qū)動(dòng)器,。驅(qū)動(dòng)器從XERR信號(hào)中形成實(shí)際位置設(shè)定值。位置控制發(fā)生在驅(qū)動(dòng)器中,。
圖3:使用DSC過程的位置控制結(jié)構(gòu)(簡(jiǎn)化結(jié)構(gòu))
可在控制器中仿真使用DSC過程的有效跟蹤誤差“servodata.followingError"。
用跟蹤函數(shù)觀測(cè)技術(shù)變量
使用S7T Config的跟蹤工具可記錄并存儲(chǔ)信號(hào)路徑和技術(shù)變量的值,。可在圖表中顯示并編輯記錄的測(cè)量值,。
在啟動(dòng)跟蹤工具前,必須將S7T Config設(shè)為在線模式并將技術(shù)變量加載到PLC,。
在瀏覽器中選中技術(shù)變量,,并選擇菜單命令PLC > Trace,來啟動(dòng)跟蹤工具,。通過Trace signal selection(圖 4 )選擇技術(shù)變量并將其分配到記錄通道,。
圖4:選擇技術(shù)變量(跟蹤)
S7-1200 的通訊伙伴
S7-1200 可以通過集成的 PN 口與以下設(shè)備進(jìn)行通訊:
其他 S7 CPU (S7-200, S7-300, S7-400, S7-1200, S7-1500)
編程設(shè)備
HMI 設(shè)備 (例如:SIMATIC 精簡(jiǎn)面板和 SIMATIC 精智面板)
支持開放式用戶通信的設(shè)備
支持的大同步,、異步通信連接數(shù)量
S7-1200 CPU 支持的大同步,、異步通訊連接數(shù)量如下所示:
| 連接類型 | 描述和大連接數(shù)量 |
開放式用戶通訊 | S7-1200 CPU 通過以下指令支持 8 個(gè)開放式用戶通訊連接(主動(dòng)或者被動(dòng)): T_SEND_C, T_RECV_C, TCON, TDISCON, TSEND 和 TRECV,。 注意
Modbus TCP 使用開放式用戶通訊(OUC)連接作為 Modbus 的通訊路徑。除了在 STEP 7 和 CPU 之間建立連接外還可以建立多個(gè)客戶機(jī)-服務(wù)器連接,。總共的客戶機(jī)-服務(wù)器連接數(shù)由 CPU 支持的大開放式用戶通訊數(shù)量決定,。 |
| S7 通訊 | 3個(gè)服務(wù)器連接: S7-1200 作為被動(dòng)方與作為主動(dòng)方的 S7 CPU 或者 LOGO! 通信,,此時(shí) S7-1200 作為 S7 服務(wù)器。主動(dòng)方 S7 CPU 或者 LOGO! 發(fā)起建立連接并使用 PUT 和 GET 指令 (S7-300,S7-400, S7-1200 和 S7-1500) 或者 指令 (S7-200)讀寫數(shù)據(jù),。 8 個(gè)客戶機(jī)連接:S7-1200 作為主動(dòng)方與作為被動(dòng)方的 S7 CPU 或者LOGO通信,,此時(shí) S7-1200 作為 S7 客戶機(jī)。主動(dòng)方 S7 CPU 發(fā)起建立連接并使用 PUT 和 GET 指令讀寫數(shù)據(jù),。
|
| HMI 連接 | 固件版本 V2 和V3
S7-1200 CPU 提供專門的 HMI 連接,,支持 多3 個(gè)HMI設(shè)備。
固件版本 V4
V4或者更高固件版本的S7-1200 CPU 支持多12個(gè)HMI 連接,。根據(jù) HMI 設(shè)備類型和功能使用模式,,每個(gè) HMI 設(shè)備實(shí)際需要1,2或3個(gè)連接資源,。這里可以保證支持4個(gè)HMI 設(shè)備而不必關(guān)心可用的連接資源數(shù)量,。同時(shí)連接超過4個(gè)HMI設(shè)備也是可能的。 |
| PG 連接 | S7-1200 CPU 支持 1 個(gè)編程設(shè)備 (PG) 連接,。 |
| Web 服務(wù)器連接 (HTTP) | S7-1200 CPU 支持 Web 服務(wù)器連接,。 |
表1
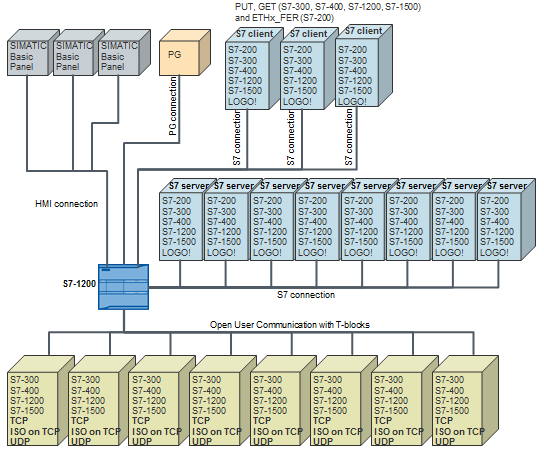
圖. 01
PROFINET 和 PROFIBUS
固件版本 V2.02 到 V2.2 的 S7-1200 CPU
對(duì)于 PROFINET,S7-1200 多支持 8 個(gè) PROFINET IO 設(shè)備和 128 個(gè)子模塊,二者以先滿足者為準(zhǔn),。對(duì)于 PROFIBUS 每個(gè) DP 主站多支持 16 個(gè) DP 從站,,每個(gè) DP 從站多 256 個(gè)子模塊。 DP 從站和 IO 設(shè)備的總數(shù)多支持 16 個(gè) ,。
固件版本 V3.0 或者更高版本的 S7-1200
S7-1200 從固件版本 V3.0 起支持 16 個(gè)PROFINET IO 設(shè)備,,多 256 個(gè)子模塊。PROFIBUS 支持 32 個(gè)從站,,每個(gè) DP 從站多 512 個(gè)子模塊,。
S7-1200 的 集成 PROFINET 接口
S7-1200 CPU集 成的 PROFINET 接口是 RJ45 插口。
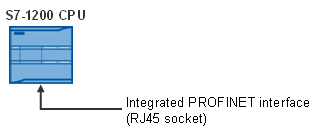
圖. 02
S7通信是S7系列PLC基于MPI,、PROFIBUS,、ETHERNET網(wǎng)絡(luò)的一種優(yōu)化的通信協(xié)議,主要用于S7300/400PLC之間的通信,。SIMATIC S7- PN CPU包含一個(gè)集成的 PROFINET 接口,,該接口除了具有 PROFINET I/O功能,還可以進(jìn)行基于以太網(wǎng)的S7通信,。SIMATIC S7- PN CPU支持無確認(rèn)數(shù)據(jù)交換,、確認(rèn)數(shù)據(jù)交換和單邊訪問功能。功能塊的調(diào)用如圖1,、圖2所示,。
塊
S7-400 | 塊
S7-300 | 描述 | 簡(jiǎn)要描述 |
| SFB 8 | FB 8 | 用于發(fā)送 | 無確認(rèn)的快速數(shù)據(jù)交換,發(fā)送數(shù)據(jù)后無對(duì)方接收確認(rèn),。 |
| SFB 9 | FB 9 | 用于接收 |
| SFB 12 | FB 12 | 用于發(fā)送 | 確認(rèn)數(shù)據(jù)交換,,發(fā)送數(shù)據(jù)后有對(duì)方接收確認(rèn)。 |
| SFB 13 | FB 13 | 用于接收 |
| SFB 14 | FB 14 | 讀數(shù)據(jù) | 單邊編程讀訪問,。 |
| SFB 15 | FB 15 | 寫數(shù)據(jù) | 單邊編程寫訪問,。 |
表1
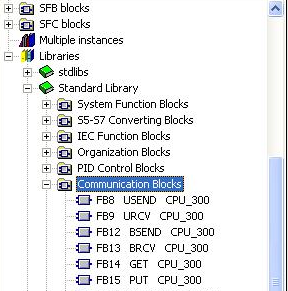
圖1
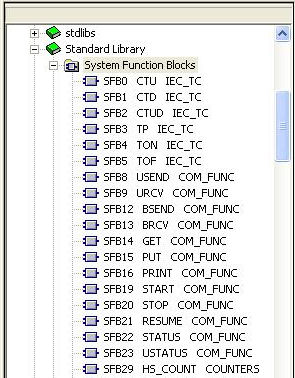
圖2
要通過 S7-PN CPU 的 集成PROFINET 接口實(shí)現(xiàn)S7 通信,需要在硬件組態(tài)中建立連接,。
2. 硬件及網(wǎng)絡(luò)組態(tài)
CPU采用兩個(gè)315-2PN/DP,,使用以太網(wǎng)進(jìn)行通信。
在STEP7中創(chuàng)建一個(gè)新項(xiàng)目,,項(xiàng)目名稱為PN S7,。插入兩個(gè)S7-300站,在硬件組態(tài)中,,分別插入CPU 315-2 PN/DP,。如圖3所示。
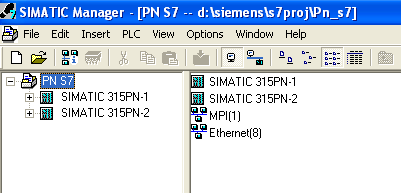
圖3
新建以太網(wǎng),,打開“NetPro"設(shè)置網(wǎng)絡(luò)參數(shù),,選中CPU,,在連接列表中建立新的連接。如圖4所示,。
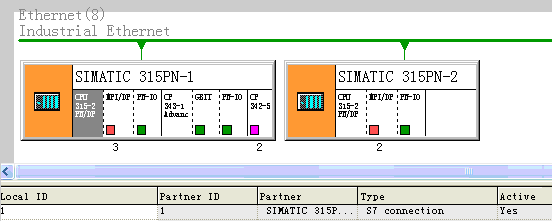
圖4
然后雙擊該連接,,設(shè)置連接屬性。在“General"屬性中塊參數(shù)ID = 1,,這個(gè)參數(shù)即是下面程序中的參數(shù)“ID",。在SIMATIC 315PN-1中激活“Establish an active connection",作為Client端,,SIMATIC 315PN-2作為Server 端,。
3. 軟件編程
3.1. 無確認(rèn)數(shù)據(jù)交換
SFB/FB 8 "USEND" 向類型為“URCV"的遠(yuǎn)程伙伴SFB/FB發(fā)送數(shù)據(jù)。執(zhí)行發(fā)送過程而不需要和SFB/FB伙伴進(jìn)行協(xié)調(diào),。也就是說,,在進(jìn)行數(shù)據(jù)傳送時(shí)不需要伙伴SFB/FB進(jìn)行確認(rèn)。
S7-300:在REQ的上升沿處發(fā)送數(shù)據(jù),。在REQ的每個(gè)上升沿處傳送參數(shù)R_ID,、
ID和SD_1。在每個(gè)作業(yè)結(jié)束之后,,可以給R_ID,、ID和SD_1參數(shù)分配新數(shù)值。
S7-400:在控制輸入REQ的上升沿處發(fā)送數(shù)據(jù),。通過參數(shù)SD_1到SD_4來指向要
發(fā)送的數(shù)據(jù),,但并非都需要用到所有四個(gè)發(fā)送參數(shù)。
然而,,必須確保參數(shù)SD_1到SD_4/SD_1和RD_1到RD_4/RD_1 (在相應(yīng)通訊伙
伴SFB/FB "URCV" 上)所定義的區(qū)域在以下幾個(gè)方面保持*:
? ?編號(hào)
? ?長度
? ?數(shù)據(jù)類型
參數(shù)R_ID必須在兩個(gè)SFB中*相同,。如果傳送成功完成,,則通過狀態(tài)參數(shù)DONE來表示,,此時(shí)其邏輯數(shù)值為1。
SFB/FB 9 "URCV" 從類型為“USEND"的遠(yuǎn)程伙伴SFB/FB中異步接收數(shù)據(jù),,并
把接收到的數(shù)據(jù)復(fù)制到組態(tài)的接收區(qū)域內(nèi),。
當(dāng)程序塊準(zhǔn)備好接收數(shù)據(jù)時(shí),EN_R輸入處的邏輯值為1,??梢酝ㄟ^EN_R=0來取
消一個(gè)已激活的作業(yè)。
S7-300:在EN_R的每個(gè)上升沿處應(yīng)用參數(shù)R_ID,、ID和RD_1,。在每個(gè)作業(yè)結(jié)束
之后,可以給R_ID,、ID和RD_1參數(shù)分配新數(shù)值,。
S7-400:通過參數(shù)RD_1到RD_4來指向接收數(shù)據(jù)區(qū),。
必須確保參數(shù)RD_i/RD_1和SD_i/SD_1 (在相應(yīng)通訊伙伴SFB/FB "USEND"
上)所定義的區(qū)域在以下幾個(gè)方面保持*:
?? 編號(hào)
? ?長度
? ?數(shù)據(jù)類型。
通過NDR狀態(tài)參數(shù)邏輯數(shù)值為1來指示已經(jīng)成功完成復(fù)制處理過程,。參數(shù)R_ID必須在兩個(gè)SFB/FB上*相同,。
打開SIMATIC 315PN-1的OB1,在OB1中依次調(diào)用FB8,,F(xiàn)B9如圖5,、圖6所示:
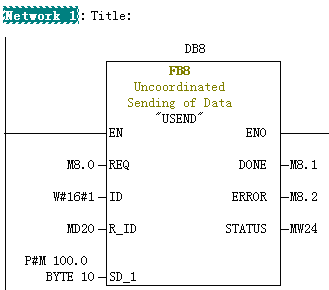
圖5
程序中的參數(shù)說明見表2
| 參數(shù) | 描述 | 數(shù)據(jù)類型 | 存儲(chǔ)區(qū) | 描述 |
| REQ | INPUT | BOOL | I、Q,、M,、D、L | 上升沿觸發(fā)工作 |
| ID | INPUT | WORD | M,、D,、常數(shù) | 連接ID |
| R_ID | INPUT | DWORD | I、Q,、M,、D、L,、常數(shù) | 連接號(hào),,相同連接號(hào)的功能塊互相對(duì)應(yīng)發(fā)送/接收數(shù)據(jù) |
| DONE | OUTPUT | BOOL | I、Q,、M,、D、L | 為1時(shí),,發(fā)送完成 |
| ERROR | OUTPUT | BOOL | I,、Q、M,、D,、L | 為1時(shí),有故障發(fā)生 |
| STATUS | OUTPUT | WORD | I,、Q,、M、D,、L | 狀態(tài)代碼 |
S7-300:
SD_1
S7-400:
SD_i
(1 ≤ i ≤ 4) | IN_OUT | ANY | M,、D、T,、Z I,、Q、M,、D,、T,、C | 發(fā)送數(shù)據(jù)區(qū) |
表2 FB8參數(shù)說明
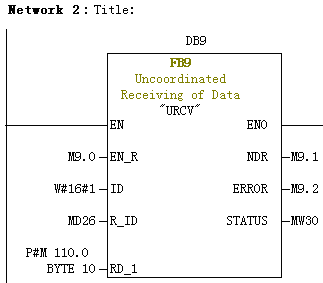
圖6
程序中的參數(shù)說明見表3
| 參數(shù) | 參數(shù) | 數(shù)據(jù)類型 | 存儲(chǔ)區(qū) | 描述 |
| EN_R | INPUT | BOOL | I、Q,、M,、D、L,、常數(shù) | 為1時(shí),,準(zhǔn)備接收 |
| ID | INPUT | WORD | M、D,、常數(shù) | 連接ID |
| R_ID | INPUT | DWORD | I,、Q、M,、D,、L、常數(shù) | 連接號(hào),,相同連接號(hào)的功能塊互相對(duì)應(yīng)發(fā)送/接收數(shù)據(jù) |
| NDR | OUTPUT | BOOL | I,、Q、M,、D,、L | 為1時(shí),接收完成 |
| ERROR | OUTPUT | BOOL | I,、Q,、M、D,、L | 為1時(shí),,有故障發(fā)生 |
| STATUS | OUTPUT | WORD | I、Q,、M,、D、L | 狀態(tài)代碼 |
S7-300:
RD_1
S7-400:
RD_i
(1 ≤ i ≤ 4) | IN_OUT | ANY | M,、D,、T、Z I,、Q、M,、D,、T、Z | 接收數(shù)據(jù)區(qū) |
表3 FB9參數(shù)說明
西門子NCU數(shù)控主板6FC5357-0BB25-0AA0
2,、 邏輯控制模塊 LOGO,!
? 內(nèi)置 HMI:MiniWeb_linemb_systemconfiguration.ini(828D 使用及 840Dsl TCU+NCU 配置)
? Win7 操作系統(tǒng):MiniWeb_win7_systemconfiguration.ini(840Dsl PCU+NCU 配置,,Win7
平臺(tái))
? Xp 操作系統(tǒng):MiniWeb_winxp_systemconfiguration.ini(840Dsl PCU+NCU 配置,WinXP
平臺(tái))
第 11 章 功能
11.2 OPC-UA 數(shù)據(jù)訪問
拷貝配置樣例文件到 HMI 數(shù)據(jù)設(shè)置制造商目錄下
實(shí)際上文件拷貝到 CF/oem/Sinumeirk/hmi/cfg 目錄下,。
例:使用內(nèi)置 HMI,,拷貝 MiniWeb_linemb_systemconfiguration.ini 文件
更改文件名稱為 systemconfiguration.ini。
選擇文件,,點(diǎn)擊屬性 ,,修改文件名稱為 systemconfiguration.ini.
4) 配置 MiniWeb Server 的 IP 地址
模板的文件:第 11 章 功能
11.2 OPC-UA 數(shù)據(jù)訪問
控制器6FC5357-0BB24-0AA0 現(xiàn)貨

400,
11-7
拷貝模板文件到系統(tǒng) CF/oem/SINUMERIK/hmi/miniweb/WebCfg 目錄下
在 OPC_UAApplication.xml 文件中配置 Server 的 IP 地址
文件中已經(jīng)說明,,使用 X130 的 IP 地址,,替換文件中所有的 localhost,總共有 3 處,。
替換完畢的文件:
5) 激活 OPC UA 服務(wù)器
選擇 -> -> ,,設(shè)置管理員及密碼,并激活 OPC UA,。
系統(tǒng)重新上電,,生效。
第 11 章 功能
11.3 驅(qū)動(dòng)器
11-8
6) 測(cè)試 OPC-UA 服務(wù)器
使用 OPC UA 客戶端測(cè)試接系統(tǒng),,客戶端測(cè)試軟件可以自行在網(wǎng)上下載,,也可以在 OPC
服務(wù)器的時(shí)候,就說明在 Operate 上配置的服務(wù)器已經(jīng)生效了,。
 您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)












