 您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)










| 產地類別 | 進口 | 應用領域 | 化工,電子/電池 |
|---|---|---|---|
| 產地 | 德國 | 品牌 | 西門子 |
有些負載在特定的頻率下需要電機提供特定的轉矩,,用可編程的v/f控制對應設置變頻器參數(shù)即可得到所需控制曲線。設置p1320,、p1322,、p1324確定可編程的v/f特性頻率座標,對應的p1321,、p1323,、p1325為可編程的v/f 特性電壓座標。
參數(shù)p1300設置為20,,變頻器工作于矢量控制,。這種控制相對完善,調速范圍寬,,低速范圍起
 |
| 參考價 | 面議 |
更新時間:2022-02-24 11:41:25瀏覽次數(shù):441
聯(lián)系我們時請說明是化工儀器網(wǎng)上看到的信息,,謝謝!
 |
 |
 |
|
 |
西門子MM440變頻器6SE6440-2UD32-2DB1
PROFIBUS PA主站系統(tǒng)通過DP/PA link連接到PROFIBUS DP主站系統(tǒng),。
DP/PA link包含一個或兩個IM153-2接口模塊以及相互連接的一到五個 DP/PA 耦合器。
DP/PA link經接口模塊連接到PROFIBUS DP主站,。在DP/PA link中使用兩個接口模塊,,可以連接DP/PA link到冗余的PROFIBUS DP主站。底層的PROFIBUS PA現(xiàn)場設備經DP/PA 耦合器連接到DP/PA link.
這意味著DP/PA link創(chuàng)建了一個從PROFIBUS DP主站系統(tǒng)到PROFIBUS PA主站系統(tǒng)的網(wǎng)關,。
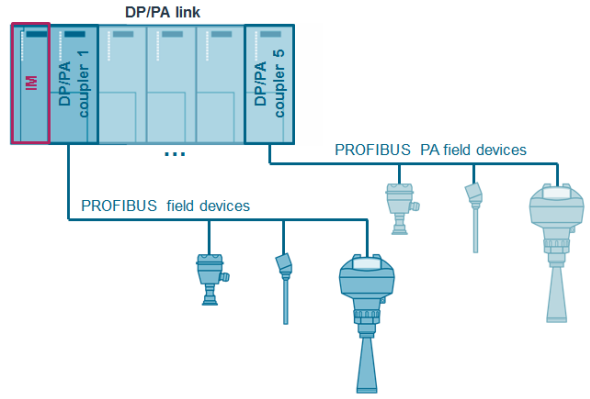
圖 01
DP/PA link工作原理
在PROFIBUS DP傳輸速率超過45.45K的情況下可以使用DP/PA link。DP/PA link在背板總線上將PROFIBUS DP較高的傳輸速率重置至45.45K,,并傳遞到DP/PA耦合器,。只需組態(tài)DP/PA link的接口模塊,。DP/PA耦合器無需組態(tài)。
DP/PA coupler功能
DP/PA coupler是PROFIBUS DP與PROFIBUS PA的物理連接器。
DP/PA coupler可以在沒有其他組件的情況下獨立運行,。這使得PROFIBUS PA現(xiàn)場設備經PROFIBUS DP訪問成為可能,。DP/PA coupler可以在PROFIBUS DP支持45.45Kbuad的情況下獨立使用,,并且這也是允許的傳輸速率,。在這種情況下,DP/PA coupler無需組態(tài),,只要連接到PROFIBUS主站即可,。PROFIBUS PA現(xiàn)場設備直接通過PROFIBUS DP來組態(tài),。
DP/PA link是上層DP 主站的DP從站,,并作為底層總線系統(tǒng)(PA現(xiàn)場總線)站點的代理。
DP/PA link形成一個獨立的,、通過通信技術與上層DP主站系統(tǒng)去耦的底層總線系統(tǒng)。
多個DP/PA coupler可用來增加PA主站系統(tǒng)的電流帶載能力,。
DP/PA link中所有的DP/PA耦合器構成與所連接的PA現(xiàn)場設備共用的總線系統(tǒng)。
新的存儲機制
充足的存儲空間,可用于各行業(yè)的所有應用
靈活的存儲卡機制,適合各種項目規(guī)模
較大的存儲空間:支持高達 2 GB 的存儲卡,可存儲項目數(shù)據(jù),歸檔,配方和相關文檔
優(yōu)化后的數(shù)據(jù)模塊,可準確選擇剩余存儲空間中的數(shù)據(jù),。
SIMATIC 工業(yè)軟件具有模塊化的設計。各個工具可根據(jù)特定應用而單獨使用,。
提供了 4 個軟件級別:
STEP 7 是用于對 SIMATIC S7/C7/WinAC 進行編程的基礎,。編程時總要使用該軟件。
它具有以下版本:
STEP 7:
用于各種應用的完方版本,帶有梯形圖,功能塊圖和指令表編程語言
STEP 7 Professional 高性能軟件包:
支持所有 IEC 語言(梯形圖,功能塊圖,指令表,順序功能圖和結構化文本),。并且,還提供了一個集成離線模擬組件 (S7-PLCSIM),。
STEP 7 Lite:
適用于較低性能范圍的版本,可用于 SIMATIC S7-300 和 SIMATIC C7
STEP 7 Micro:
用于 SIMATIC S7-200 的精簡編程軟件包
工程工具是一些面向任務的工具,除 STEP 7 之外也可使用這些工具。它們可大大降低能源成本,并顯著提高舒適性,。
設計工具(Engineering Tool)包括:
供編程人員使用的高級語言
供技術專家使用的圖形化語言
用于診斷,模擬,遠程維護,設備文檔制作等的擴展軟件。
運行版軟件包括已編程好并可由用戶程序調用的解決方案,。它直接集成在自動化解決方案中,分為兩種類型:
硬件捆綁:
軟件與特定硬件相關
非硬件捆綁:
軟件可滿足一般硬件要求。
例如,運行版軟件包括:
用于 SIMATIC S7 和 WinAC 的控件
用于將自動化系統(tǒng)集成到 Windows 應用程序中的工具
您可在“基于 SIMATIC PC 的控制"下面找到用于基于 PC 的控制的運行版軟件。
人機界面包括:
SIMATIC ProTool 和 ProTool/Lite 用于組態(tài)操作面板
SIMATIC ProTool/Pro – 通過 PC 實現(xiàn)機器級可視化
SIMATIC ProAgent ? 用于過程診斷的選件包
SIMATIC WinCC flexible – 用于組態(tài) SIMATIC HMI 操作員面板的工程工具和用于在機器級簡便完成可視化任務的高性能可視化軟件
SIMATIC WinCC – Windows NT/2000/XP 系統(tǒng)下的高性能可視化系統(tǒng)
西門子常用兩種電線電纜簡介如下: 一種為紫色電纜 一種為藍色電纜
(1)自動上水
水箱內裝液位傳感器p,,水箱內水低于一定值時(20%),,自動補水閥上電,水箱自動補水,,水位達到設定值時(90%),,自動補水閥斷電,自動補水停止,。
(2)集熱循環(huán)
當集熱器出水口水溫(出水口安裝溫度傳感器)高于水箱內水溫,,達到PLC設定啟動溫差(6-10攝氏度)時,集熱循環(huán)泵啟動;集熱水箱中的低溫水進入到真空管集熱器組中,,集熱器中的相對高溫水循環(huán)到集熱水箱中,,使水箱中的水溫升高。當溫差值降低到系統(tǒng)設定停止溫差時(1-3攝氏度),,循環(huán)泵停止,,集熱循環(huán)停止。如此反復進行,,逐漸將熱量傳遞到水箱,,使水箱中的水溫度逐漸提升,直到達到洗浴要求的溫度,。
(3)管路恒溫出水
恒溫回水管路循環(huán)主要是針對室內的洗浴熱水管道而言,,為了保證洗浴時一開噴頭閥門即有熱水,,同時減少無效冷水的浪費,必須安裝熱水回水管路,,采取管路循環(huán)措施,。管路循環(huán)采用定溫循環(huán)方式,在室內熱水回水管路中適當位置安裝溫度檢測傳感器和循環(huán)泵,,設置一個溫度范圍來控制泵的運行,。當管道內水溫低于設定值時,啟動洗浴管道循環(huán)泵,,將管路中的低溫熱水打入保溫水箱,,當水溫達到設定值時,管道循環(huán)泵停止運行,。
(4)恒溫控制
當水箱內水溫低于一定值時,,集熱器不能達到洗浴熱水的溫度要氣,此時開啟水箱內電加熱或其它輔助熱源(空氣源熱泵),,以實現(xiàn)任何天氣條件下都能保證有熱水供應的要氣,。
(5)冬季防凍循環(huán)
室外管道(保溫水箱和集熱器之間)在寒冷的冬天可能被凍,因此必須有防凍循環(huán)功能;當集熱器溫度(檢測傳感器測溫)低于一定值(2-5攝氏度)時,,啟動集熱循環(huán)泵,,將保溫水箱中的熱水打進集熱器,防止管路結凍,。
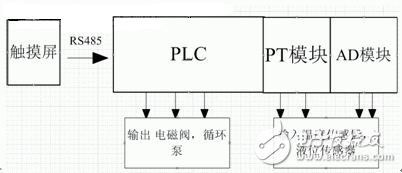
系統(tǒng)上位機選用HMI b7s515型號觸摸屏以實現(xiàn)系統(tǒng)運行的可視化監(jiān)測與控制,,下位機選用臺達系列PLC,主機CPU選用DVP40ES2,,溫度模塊選用04PT-E2,,AD模塊選用04AD-E2。擴展模塊還可加入功率變送器,,監(jiān)測電磁閥,,循環(huán)泵以及輔助熱源的功率,如圖2所示,。
(1)溫度傳感器所測得溫度相關信號經PT模塊轉化為數(shù)字量后傳回PLC的CPU,PLC的狀態(tài)反應到觸摸屏上,,實現(xiàn)數(shù)據(jù)的實時監(jiān)控,,如圖3所示。
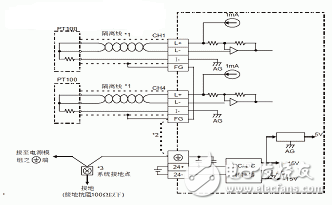
圖3 溫度傳感器PT100與DVP04PT模塊的外部接線圖
(2)水箱液位傳感器測得電信號后,,經液位變送器將電信號轉化為4-20mA的標準電流信號后,,經AD模塊轉換為數(shù)字量信號傳回PLC,PLC根據(jù)設定值做出判斷,,控制水箱電磁閥的開啟與斷開,,如圖4所示,。
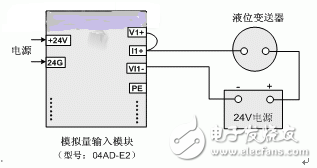
圖4 液位變送器與04AD-E2模塊的外部接線圖
另外,各溫度傳感器的測量溫度直接代表各個組成部分的溫度,,以此來控制系統(tǒng)的運行,,因此,溫度傳感器的安裝位置極其重要,。溫度傳感器安裝處的水溫必須能代表所測部分的平均溫度,。
(1)WPL Soft開發(fā)PLC控制程序
WPL Soft為臺達電子可編程控制器DVP系列在WINOOWs存在系統(tǒng)環(huán)境下所使用的程序編程軟件,臺達PLC采用可以編制程序的存儲器,,用來在其內部執(zhí)行邏輯運算,、順序運算、計時,、計數(shù)和算術運算等操作的指令,,并能通過數(shù)字式或模擬式的輸入和輸出,控制各種類型的機械或生產過程,。
系統(tǒng)控制的關鍵是溫度,、液位的比較,通過PLC的比較指令可方便的實現(xiàn),。
各擴展模塊讀取參數(shù)的頻率,、精度是本控制系統(tǒng)的關鍵,臺達PLC提供的溫度控制模塊,、AD轉換模塊可以輕松的實現(xiàn)系統(tǒng)的自動化精確控制,。
(2)觸摸屏人機界面(HMI)程序
觸摸屏替代鼠標及鍵盤部分功能,安裝在顯示屏前端的輸入設備,,是人與控制系統(tǒng)之間傳遞,、交換信息的媒介和對話接口,包括遠距離的信息傳遞與控制,,是控制系統(tǒng)的重要組成部分,。在PLC控制程序中加入開關量,與HMI的寄存器相關聯(lián),,實現(xiàn)HMI與PLC的關聯(lián),,如圖5所示。
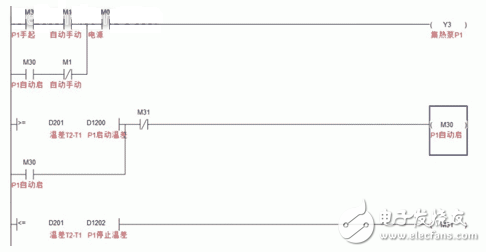
圖5 PLC程序控制集熱循環(huán)泵的啟動與停止
西門子MM440變頻器6SE6440-2UD32-2DB1

1.2 BOP修改參數(shù)
下面通過將參數(shù)P1000的第0組參數(shù),,即設置P1000[0]=1的過程為例,,介紹一下通過操作BOP面板修改一個參數(shù)的流程:

本變頻器由微處理器控制,并采用具有現(xiàn)代*技術水平的絕緣柵雙極型晶體管(IGBT)作為功率輸出器件,。因此,,它們具有很高的運行可靠性和功能的多樣性。其脈沖寬度調制的開關頻率是可選的,因而降低了電動機運行的噪聲,。全面而完善的保護功能為變頻器和電動機提供了良好的保護,。
1.2 特點
主要特性
? 易于安裝,參數(shù)設置和調試 ? 易于調試 ? 牢固的EMC設計
? 可由IT(中性點不接地)電源供電 ? 對控制信號的響應是快速和可重復的
? 參數(shù)設置的范圍很廣,,確保它可對廣泛的應用對象進行配置 ? 電纜連接簡便 ? 具有多個繼電器輸出
? 具有多個模擬量輸出(0 – 20 mA)
? 6 個帶隔離的數(shù)字輸入,,并可切換為 NPN/PNP 接線 ? 2 個模擬輸入:
? AIN1:0 – 10 V, 0 – 20 mA 和 –10至 +10 V ? AIN2:0 – 10 V,, 0 – 20 mA ? 2個模擬輸入可以作為第7和第8個數(shù)字輸入 ? BiCo(二進制互聯(lián)連接)技術 ? 模塊化設計,,配置非常靈活
? 脈寬調制的頻率高,因而電動機運行的噪音低 ? 詳細的變頻器狀態(tài)信息和全面的信息功能
? 有多種可選件供用戶選用:用于與 PC通訊的通訊模塊,,基本操作面板(BOP-2)和用于進行
現(xiàn)場總線通訊的PROFIBUS 模塊
? 用于水泵和風機控制時的特點:
? 電動機的分級控制
? 節(jié)能控制方式
? 手動/自動控制(手動操作/ 自動操作)
? 傳動皮帶故障的檢測(對水泵無水空轉的檢測)
使用中常常遇到因個別參數(shù)設置不當,,導致變頻器不能正常工作的現(xiàn)象。
控制方式:即速度控制,、轉距控制,、PID控制或其他方式。采取控制方式后,,一般要根據(jù)控制精度,,需要進行靜態(tài)或動態(tài)辨識。
zui低運行頻率:即電機運行的zui小轉速,,電機在低轉速下運行時,,其散熱性能很差,電機長時間運行在低轉速下,,會導致電機燒毀,。而且低速時,其電纜中的電流也會增大,,也會導致電纜發(fā)熱,。
zui高運行頻率:一般的變頻器zui大頻率到60Hz,有的甚至到400 Hz,,高頻率將使電機高速運轉,,這對普通電機來說,其軸承不能長時間的超額定轉速運行,,電機的轉子是否能承受這樣的離心力,。
載波頻率:載波頻率設置的越高其高次諧波分量越大,這和電纜的長度,,電機發(fā)熱,,電纜發(fā)熱變頻器發(fā)熱等因素是密切相關的。
電機參數(shù):變頻器在參數(shù)中設定電機的功率,、電流、電壓,、轉速,、zui大頻率,,這些參數(shù)可以從電機銘牌中直接得到。
跳頻:在某個頻率點上,,有可能會發(fā)生共振現(xiàn)象,,特別在整個裝置比較高時;在控制壓縮機時,,要避免壓縮機的喘振點,。
控制參數(shù)
變頻器日常使用中出現(xiàn)的一些問題,很多情況下都是因為變頻器參數(shù)設置不當引起的,。西門子變頻器可設置的參數(shù)有幾千個,,只有系統(tǒng)地、合適地,、準確地設置參數(shù)才能充分利用變頻器性能,。[1]
變頻器控制方式的選擇由負荷的力矩特性所決定,電動機的機械負載轉矩特性根據(jù)下列關系式決定:
p= t n/ 9550
式中:p——電動機功率(kw)
t——轉矩(n. m)
n——轉速(r/ min)
轉矩t與轉速n的關系根據(jù)負載種類大體可分為3種[2],。
(1)即使速度變化轉矩也不大變化的恒轉矩負載,,此類負載如傳送帶、起重機,、擠壓機,、壓縮機等。
(2)隨著轉速的降低,,轉矩按轉速的平方減小的負載,。此類負載如風機、各種液體泵等,。
(3)轉速越高,,轉矩越小的恒功率負載。此類負載如軋機,、機床主軸,、卷取機等。
變頻器提供的控制方式有v/f控制,、矢量控制,、力矩控制。v/f控制中有線性v/f控制,、拋物線特性v/f控制,。將變頻器參數(shù)p1300設為0,變頻器工作于線性
v/f控制方式,,將使調速時的磁通與勵磁電流基本不變,。適用于工作轉速不在低頻段的一般恒轉矩調速對象。
將p1300設為2,變頻器工作于拋物線特性v/f控制方式,,這種方式適用于風機,、水泵類負載。這類負載的軸功率n近似地與轉速n的3次方成正比,。其轉矩m近似地與轉速n的平方成正比,。對于這種負載,如果變頻器的v/f特性是線性關系,,則低速時電機的許用轉矩遠大于負載轉矩,,從而造成功率因數(shù)和效率的嚴重下降。為了適應這種負載的需要,,使電壓隨著輸出頻率的減小以平方關系減小,,從而減小電機的磁通和勵磁電流,使功率因數(shù)保持在適當?shù)姆秶鷥取?/p>
可以進一步通過設置參數(shù)使v/f控制曲線適合負載特性,。將p1312在0至250之間設置合適的值,,具有起動提升功能。將低頻時的輸出電壓相對于線性的v/f曲線作適當?shù)奶岣咭匝a償在低頻時定子電阻引起的壓降導致電機轉矩減小的問題,。適用于大起動轉矩的調速對象,。
變頻器v/f控制方式驅動電機時,在某些頻率段,,電機的電流,、轉速會發(fā)生振蕩,嚴重時系統(tǒng)無法運行,,甚至在加速過程中出現(xiàn)過電流保護,,使得電機不能正常啟動,在電機輕載或轉矩慣量較小時更為嚴重,??梢愿鶕?jù)系統(tǒng)出現(xiàn)振蕩的頻率點,在v/f曲線上設置跳轉點及跳轉頻帶寬度,,當電機加速時可以自動跳過這些頻率段,,保證系統(tǒng)能夠正常運行。從p1091至p1094可以設定4個不同的跳轉點,,設置p1101確定跳轉頻帶寬度,。
有些負載在特定的頻率下需要電機提供特定的轉矩,用可編程的v/f控制對應設置變頻器參數(shù)即可得到所需控制曲線,。設置p1320,、p1322、p1324確定可編程的v/f特性頻率座標,,對應的p1321,、p1323,、p1325為可編程的v/f 特性電壓座標。
參數(shù)p1300設置為20,,變頻器工作于矢量控制,。這種控制相對完善,調速范圍寬,,低速范圍起動力矩高,精度高達0.01%,,響應很快,,高精度調速都采用svpwm矢量控制方式。
參數(shù)p1300設置為22,,變頻器工作于矢量轉矩控制,。這種控制方式是目前上的控制方式,其他方式是模擬直流電動機的參數(shù),,進行保角變換而進行調節(jié)控制的,,矢量轉矩控制是直接取交流電動機參數(shù)進行控制,控制簡單,,精確度高,。
應用范圍
MICROMASTER 440變頻器適合用于各種變速驅動裝置,由于它具有高度的靈活性因而可以在廣泛的領域得到應用,。它尤其適合用于吊車和起重系統(tǒng),、立體倉儲系統(tǒng)、食品,、飲料和煙草工業(yè)以及包裝工業(yè)的定位系統(tǒng),。這些應用對象要求變頻器具有比常規(guī)應用更高的技術性能和更快的動態(tài)響應;變頻器的特點是設備性能面向用戶的需求,,并且使用方便,。他的輸入電源電壓范圍寬廣,適用于*,。
設計
MICROMASTER440變頻器采用模塊化結構設計,,操作面板和各種模塊易于更換。
標準
MICROMASTER 440變頻器符合EU?—低電壓規(guī)范的要求,;變頻器帶有MM440濾波器符合EU—EMC規(guī)范的要求,。
主要特點
調試簡單;模塊化結構,,因而其配置具有zui大的靈活性,; 6個可編程,帶隔離的數(shù)字輸入,;2個模擬輸入(0V至10V,,0mA至20mA,,可標定)它們也可以作為第7/8個數(shù)字輸入使用;2個可編程的模擬輸出(0mA至20mA),;3個可編程的繼電器輸出(30V直流/5A,,電阻性負載,250V交流/2SA,,電感性負載),;當使用較高的的開關頻率,電動機可以降低噪聲運行,;完善的電動機和變頻器保護功能,;
可選項(概覽)
A級/B級EMC濾波器;LC濾波器,;進線電抗器,;輸出電抗器;密封蓋,;設變頻器參數(shù)的BOP基本操作板,;具有多種文本顯示功能的高級操作板AOP;通訊模塊- PROFIBUS,,-DeviceNET,,-CANNopen;脈沖編碼器脈沖計數(shù)模塊,;PC連接組合件,;控制柜門上安裝操作板的組合件;PC調試工具,,在Windows95/98和NT/2000/XP Professional下運行,;與DruveES的TIA集成。
機械結構的特點
模塊化的設計,;工作溫度0.12KW至75KW:-10°C~+50°C 90KW至200KW:0°C~+40°C,;緊湊型結構,單位空間內的變頻器kw數(shù)高,;電纜連接方便,,電源和電動機接線相互隔離,達到*的電磁兼容性效果,;可嵌入的操作面板,;可拆卸的I/O板上,控制端子的連接不用螺絲,。
控制性能的特點
采用的IGBT技術,;數(shù)字的微處理控制;高質量的矢量控制系統(tǒng),;磁通電流控制,,可以改善動態(tài)響應特性,,并且優(yōu)化電動機的控制;線性v/f控制,;平方v/f控制,;多點v/f特性(可編程的v/f特性);捕捉再起動,;滑差補償,;在電源中斷或故障以后自動再起動:可以由用戶定義的自由功能塊,實現(xiàn)邏輯運算和算術運算的操作,;動態(tài)緩沖,;用于定位控制的減速斜坡函數(shù)曲線;變頻器具有內置的高級PID調節(jié)器,,可編程的加速/減速斜坡函數(shù),范圍為0至650秒,;斜坡起始和結束的平滑功能,;快速電流限制功能,避免運行中有的跳閘,;快速,、可重復的數(shù)字輸入響應時間;使用 2個高分辨率的10位二進制模擬輸入,,實現(xiàn)速度精調,;復合制動,實現(xiàn)快速制動控制,;集成的制動斬波器,;4個跳轉頻率;可拆卸的‘Y’ 性電容器鏈路,,可用于中性點不接地的電源系統(tǒng),。
過載功能:CT方式和VT方式;過電壓/欠電壓保護,;變頻器過溫保護,;直接與PTC通過數(shù)字輸入實現(xiàn)電動機過熱保護;接地故障保護,;短路保護,;電動機過熱保護;防止電動機失速,;參數(shù)互鎖,。
