西門子6SE6440-2UE37-5FA1
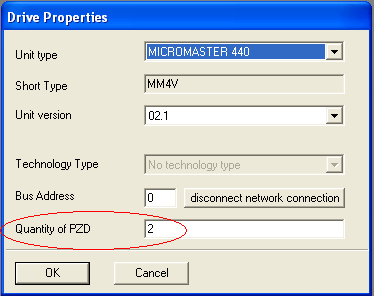
現(xiàn)象:在用DriveMonitor 調(diào)試MM4變頻器時(shí),在線狀態(tài)下有時(shí)會(huì)遇到參數(shù)顯示不正常(亂碼)的問題,。如圖1所示:
圖 1
問題解決:這是由于在設(shè)置驅(qū)動(dòng)屬性時(shí),,設(shè)置的PZD的數(shù)量與變頻器中的設(shè)置不*造成的,如圖2,。因此在新建變頻器參數(shù)時(shí),,應(yīng)檢查MM4的參數(shù)P2012[0]或P2012[1](根據(jù)連接的MM4接口)確定通訊接口PZD的數(shù)量。使得DriveMonitor中設(shè)置的PZD的數(shù)量與變頻器中的設(shè)置*,。在使用DriveMonitor調(diào)試其他變頻器時(shí),,同樣要注意這個(gè)問題。
一,、分析Timer
1. 提出問題
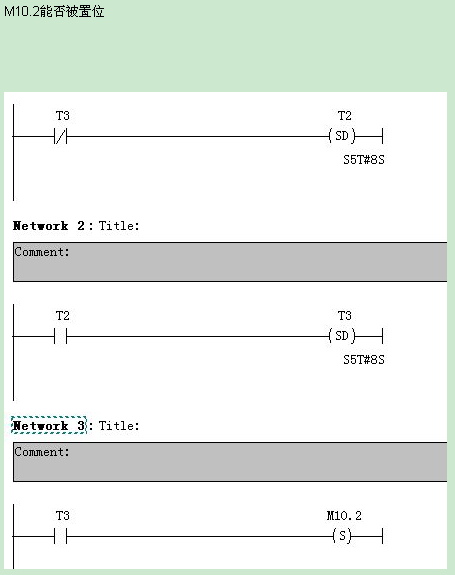
圖1
問題1:M10.2能否被置位,?
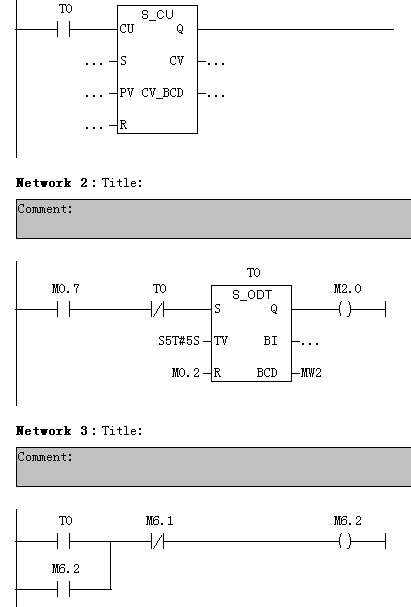
圖2
問題2:S_CU計(jì)數(shù)有無問題,M6.2能否被置位?
先來了解一下都有哪幾個(gè)計(jì)時(shí)器,,以及它們的特性如何
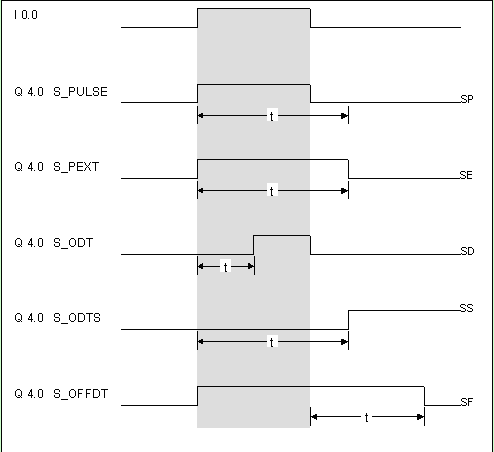
圖3
2. 計(jì)時(shí)器描述
從以圖3可以看出5個(gè)計(jì)時(shí)器的基本特性,,可以簡單的從中挑選與控制工藝相符合的計(jì)時(shí)器使用,如果想了解計(jì)時(shí)器的詳細(xì)信息,,可以選擇計(jì)時(shí)器,,并按F1看幫助信息中的具體邏輯圖。
以計(jì)時(shí)器SD為例,,參見圖4
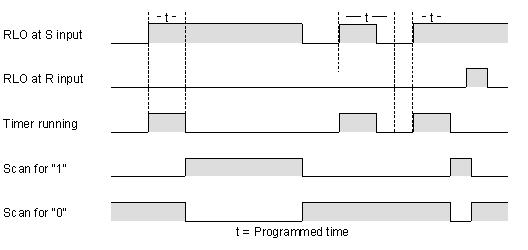
圖4
我們從中可以知道,,當(dāng)觸發(fā)端S的信號為上升沿時(shí),,觸發(fā)計(jì)時(shí)器開始運(yùn)行,時(shí)間結(jié)束后計(jì)時(shí)器輸出端為1,,S信號為下降沿時(shí),,計(jì)時(shí)器輸出端為0
那么根據(jù)此情況,以圖1為例,,咱們可以把剛才的梯形圖程序通過時(shí)序圖表示如下圖5
其中a,b之間是在掃描此段程序兩個(gè)周期之間的間隙,。
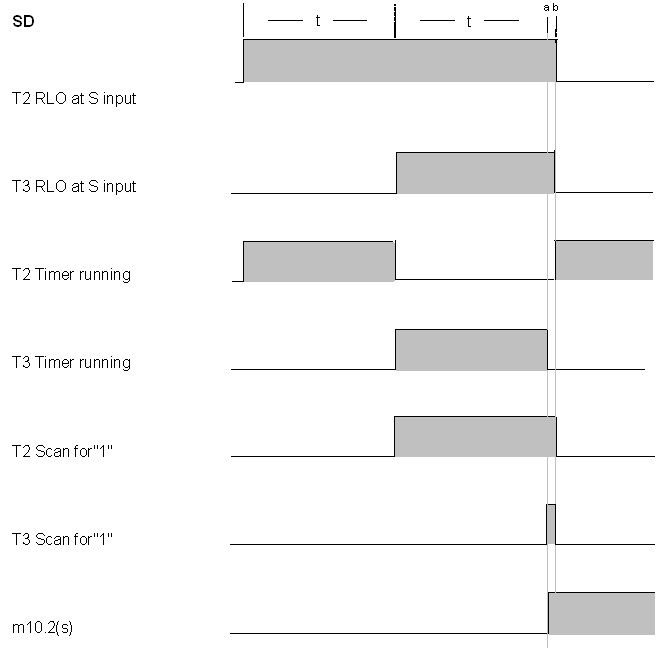
圖5
西門子6SE6440-2UE37-5FA1
SIWAREX WP231自動(dòng)標(biāo)定(理論標(biāo)定 )
SIWAREX 稱重模塊進(jìn)行砝碼或?qū)嵨飿?biāo)定時(shí),要求砝碼或者實(shí)物重量大于傳感器量程總和的5%,,對于一些量程幾百噸的傳感器,,現(xiàn)場可能不具備砝碼或?qū)嵨飿?biāo)定的條件,此時(shí)可以采用理論標(biāo)定,。
理論標(biāo)定是基于傳感器廠家提供的技術(shù)參數(shù)(傳感器量程和特征值),,其原理如下:
SIWAREX WP231給稱重傳感器的供電電壓為4.85V,假設(shè)傳感器量程為200t,,特征值為2mV/V,,那么當(dāng)傳感器受到200t的力時(shí),輸出信號為9.7mV (=4.85V*2mV/V),。稱重模塊根據(jù)當(dāng)前檢測到的mV信號確定當(dāng)前重量,,該重量包含秤體自重、稱量的物料的重量,、安裝應(yīng)力及震動(dòng)等原因引入的額外重力,,因此理論標(biāo)定的精度與傳感器安裝密切相關(guān)。 下面介紹WP231理論標(biāo)定的具體步驟:
首先,,將稱重傳感器正確安裝到秤下面,,并保持秤臺(tái)或者容器為空;
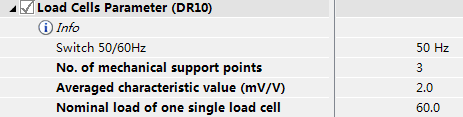
然后,,在DR10中輸入傳感器相關(guān)信息
No. of mechanical support points:傳感器數(shù)量
Average characteristic value (mV/V):傳感器特征值(靈敏度),,在傳感器銘牌或者樣本技術(shù)參數(shù)中可以查到該參數(shù);
Nominal load of one single load cell:每個(gè)稱重傳感器的額定量程
參數(shù)輸入完畢后,,鼠標(biāo)點(diǎn)擊上圖的Load cells parameter (DR 10),,鼠標(biāo)右鍵選擇Send,將上述參數(shù)設(shè)置發(fā)送到稱重模塊中,。
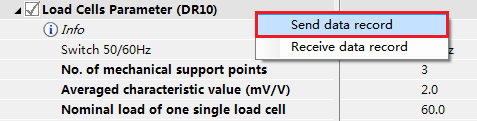
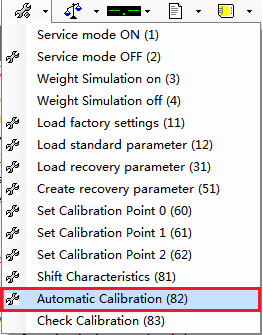
最后,,執(zhí)行Automatic Calibration (82)
 您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)















