西門子6SE6440-2UE27-5CA1
一臺進口數(shù)控旋壓機(西門子840D系統(tǒng)),,開機后液壓不啟動。通過分析后發(fā)現(xiàn),,其液壓啟動回路串聯(lián)在電源模塊的113和63端子上,,在正常狀態(tài)下,開機后113上產(chǎn)生24V電壓,,通過液壓回路,,脈沖使能端子63上也將出現(xiàn)24V電壓,,電源模塊開始正常工作。在故障狀態(tài)下,,測量電源模塊各個端子,,發(fā)現(xiàn)9有24V產(chǎn)生而113沒有24V,說明電源模塊內(nèi)部電源電路*,,問題出在內(nèi)部主接觸器上,,打開電源模塊,檢測主接觸器常閉觸點,,發(fā)現(xiàn)其接觸電阻將近15k,,將該觸點修磨后,再次開機啟動液壓,,故障排除,。
從時間調(diào)度上來說PLC的程序一般不能按事先設(shè)定的循環(huán)周期運行。PLC程序是從頭到尾執(zhí)行一次后又從頭開始執(zhí)行,。(現(xiàn)在一些新型PLC有所改進,,不過對任務周期的數(shù)量還是有限制)而DCS可以設(shè)定任務周期。
在西門子200系列中各個型號的區(qū)別是什么,。S7-200系列出色表現(xiàn)在以下幾個方面:1)*的可靠性,。2)極豐富的指令集。3)易于掌握,。4)便捷的操作,。5)豐富的內(nèi)置集成功能。6)實時特性,。7)強勁的通訊能力,。
8)豐富的擴展模塊。編輯本段適用范圍----S7-200系列在集散自動化系統(tǒng)中充分發(fā)揮其強大功能,。使用范圍可覆蓋從替代繼電器的簡單控制到更復雜的自動化控制。應用領(lǐng)域極為廣泛,,覆蓋所有與自動檢測,,自動化控制有關(guān)的工業(yè)及民用領(lǐng)域,包括各種機床,、機械,、電力設(shè)施、民用設(shè)施,、環(huán)境保護設(shè)備等等
可以將MMC整個打包讀出來寫成一個IMG文件,,就象你原來用HD-COPY給軟盤做的IMG鏡象文件一樣。當然被誤格式化成電腦文件格式的MMC卡也可以用附帶的標準IMG文件來恢復,。比如你把8M MMC給格式化成16.7M的FAT格式,,結(jié)果電腦認識了,,PLC卻不認識了,這時候可以用<MMC寫卡軟件>拿8M MMC的IMG文件來恢復,,恢復完就還是PLC能認識的8M MMC了,。軟件版本的不同可能導致您無法寫入S7IMG文件,所以解壓包里共提供V0.9和V1.0兩個版本,,以供選用,。。,。
西門子PLC的MPI通訊詳解隨著科技的進步,,智能化芯片的發(fā)展逐漸成熟起來設(shè)備的智能化程度也相應提高,隨之智能化設(shè)備之間基于開放標準的現(xiàn)場總線技術(shù)構(gòu)成的自動化控制系統(tǒng)也逐漸成熟起來,。于是西門子PLC除了使用工業(yè)以太網(wǎng)和profibus,。
在我們常用的編程、組態(tài),、通訊還用到了MPI,、ASI等技術(shù)。這些技術(shù)協(xié)議實現(xiàn)西門子PLC主機與智能從站之間的通訊,,甚至兼容符合第三方產(chǎn)品的通訊協(xié)議,。西門子通訊大致有MPI網(wǎng)絡通訊、PROFIBUS網(wǎng)絡通訊,、工業(yè)以太網(wǎng)通訊這三種,。
---- NCM S7從5.0版本開始成為STEP 7的內(nèi)裝標準軟件。因此不再需要單獨訂貨和購買獨立授權(quán),。
---- 從STEP/NCM S7 5.0版本開始,,CP模塊的配置數(shù)據(jù)也可以按需要存在CPU中,即使掉電也不會丟失,,因此CP模塊更換后,,無需用編程器重新下載配置參數(shù),CPU起動后,,會自動將配置參數(shù)傳送到CP模塊,。在這種情況下,需要注意CPU的內(nèi)存空間是否足夠大,。
---- PROFIBUS-DP 的功能塊包含在STEP 7 的標準庫中,。用來使用 S5 兼容通訊 (發(fā)送/接收) 的功能塊存在 SIMATIC NET 庫中 (安裝 NCM S7)。對于連接在網(wǎng)絡上的 SIMATIC S7 可編程控制器,,可以通過網(wǎng)絡進行配置和編程,。
為工業(yè)而設(shè)計
? 通過100Mbit/s工業(yè)以太網(wǎng),可將S7-300直接集成到復雜系統(tǒng)中
? 通過WAN的TCP/IP進行遠程編程,也可使用電話線連接 (例如 ISDN)
? 通過自由UDP連接,,可適于任何數(shù)量的站
? 一個模塊可以
控制
----循環(huán)時間20ms 和400ms之間,,連續(xù)控制和步進控制的專家:FM 355模塊,還適宜于復雜的應用,。
凸輪控制
----在某些場合,,例如需要在運行時間內(nèi)處理工件,電子式FM352凸輪控制模塊是機械解決方案的一種經(jīng)濟的替代方案,,它能在32個凸輪軌跡中形成128個凸輪,。
定位
----與定位和進給軸一起,,經(jīng)常要用到快速往復/蠕動進給定位程序,。用FM351雙通道模塊控制軸的高度動態(tài)調(diào)節(jié);該模塊可用于控制變級電動機和控制標準電動機的變頻器,。帶步進電機的定位機械軸一般不需要位置測量系統(tǒng),。這里建議,對有高的時鐘脈沖速率的高度動態(tài)機械軸采用FM353步進電機模塊,。
----對于不僅要求高動態(tài)性能,,還要求高精度軸定位的應用,解決方案是使用伺服電機,。FM354功能模塊也控制對動態(tài)性能,,精度和速度都有高要求的復雜的往復進給運動。FM 357非常適宜于最多4個插補軸的協(xié)同定位--既能用于伺服電機也能用于步進電機,。所有定位模塊的一個附加優(yōu)點是,,它們可以與控制程序無關(guān)的定位各軸。其結(jié)果是:有可能進行自主測試,,全面降低復雜性--從而在啟動過程中提高了效率,。
功能模塊包含的模塊有:
計數(shù)器模塊 定位模板 電子凸輪控制器 高速布爾處理器
定位模板 步進電機功率驅(qū)動器 步進電機 閉環(huán)控制模塊
超聲波位置解碼模塊 位置輸入模塊 稱重模塊

SM331模擬量輸入模塊 SM332模擬量輸出模塊 SM334模擬量輸入/輸出模塊 SM335快速模擬量I/O模塊
模擬量模塊
詳細信息
概述 S7-300的模擬輸入/輸出模塊
用于完成包含模擬過程信號的較復雜任務
用于連接不帶附加放大器的模擬執(zhí)行元件和傳感器
應用 模擬I/O模塊包括用于S7-300的模擬輸入和輸出模塊。通過這些模塊可將模擬傳感器和執(zhí)行元件與S7-300相連,。 模擬I/O模塊具有下列優(yōu)點:
優(yōu)化配合
模塊可任意組合以配合任何所需輸入/輸出點數(shù)量,。沒有必要增加投資
強大的模擬技術(shù)
不同的I/O范圍和高分辨率允許與眾多不同的模擬傳感器和執(zhí)行元件相連
設(shè)計 模擬輸入模塊具有下列機械特性:
結(jié)構(gòu)緊湊
牢固的塑料機殼中包括:
紅色的LED表示組故障/錯誤
前面板保護著的前連接器
前面板上有標簽區(qū)
組裝簡單
該模塊安裝在 DIN 標準導軌上并通過總線連接器與相鄰模塊相連接。沒有特定插槽規(guī)定:輸入地址由插槽決定,。 接線方便
模塊由插入式前連接器進行接線,。*次插入連接器時,有一個編碼元件與之嚙合,,該連接器以后就只能插入同樣類型的模塊中。
更換模塊時,,前連接器的接線狀況無需改變就可用于同樣類型的新模塊,。
所有 SINAMICS S120 組件,包括電機和編碼器,通過共用的 DRIVE-CliQ 串行接口互連,。標準化的電纜和連接器減少了不同部件的種類,,降低庫存費用。對于其它廠商的電機或者改造應用,,可使用變換器標準組件(傳感器模板)將常規(guī)編碼器信號轉(zhuǎn)換成DRIVE-CLiQ,。
快而安全:電子銘牌
SINAMICS S120 驅(qū)動系統(tǒng)重要的數(shù)字連接件是集成在各個組件中的電子標牌。它們允許通過 DRIVE-CLiQ 鏈路自動檢測所有驅(qū)動器組件,。其結(jié)果是:調(diào)試或更換組件時無需手動輸入相關(guān)數(shù)據(jù),,從而幫助確保成功地完成調(diào)試!例如,,電機的電子標牌包含電氣等效電路圖的參數(shù)和內(nèi)置電機編碼器的特性數(shù)據(jù),,以及訂購和標識編號的信息。
模塊化設(shè)計確??缮壭院挽`活性
直流/交流單元(= 電機模塊)– 具有緊湊書本型,、書本型和裝機裝柜型 – 采用模塊化設(shè)計。所有驅(qū)動器智能組織在控制單元中,??刂茊卧獔?zhí)行驅(qū)動器分組的所有閉環(huán)控制功能。它們還處理所有其他驅(qū)動器功能,,如驅(qū)動器相關(guān) I/O 互連等,,配備 PROFIBUS DP 或 PROFINET *接口,用于連接更高級別的自動化系統(tǒng),。
電源模塊集中為電壓源直流鏈路提供能量,。電源模塊可選擇配備經(jīng)過調(diào)節(jié)的饋電/再生反饋功能,以提供恒定的直流回路電壓和高度的供電兼容性,。電機模塊從直流回路為電機供能,。
在交流/交流裝置中,整流和電機電源功能組合在一個設(shè)備中,,即電源模塊 – 具有塊型和裝機裝柜型,。對于單軸應用,驅(qū)動控制功能由安裝電源模塊上的一個特殊控制單元 (CU310-2) 來執(zhí)行,;對于多軸應用,,驅(qū)動控制功能由通過 DRIVE-CliQ 回路連接的一個控制單元(如 CU320-2)執(zhí)行。在這種情況下,,控制單元適配器安裝在代替控制單元的電源模塊上,。
西門子6SE6440-2UE27-5CA1
S7-1200+V90 PTI定位控制
V90 PTI 驅(qū)動支持兩個脈沖輸入通道,PLC通過發(fā)送脈沖信號實現(xiàn)位置控制,。
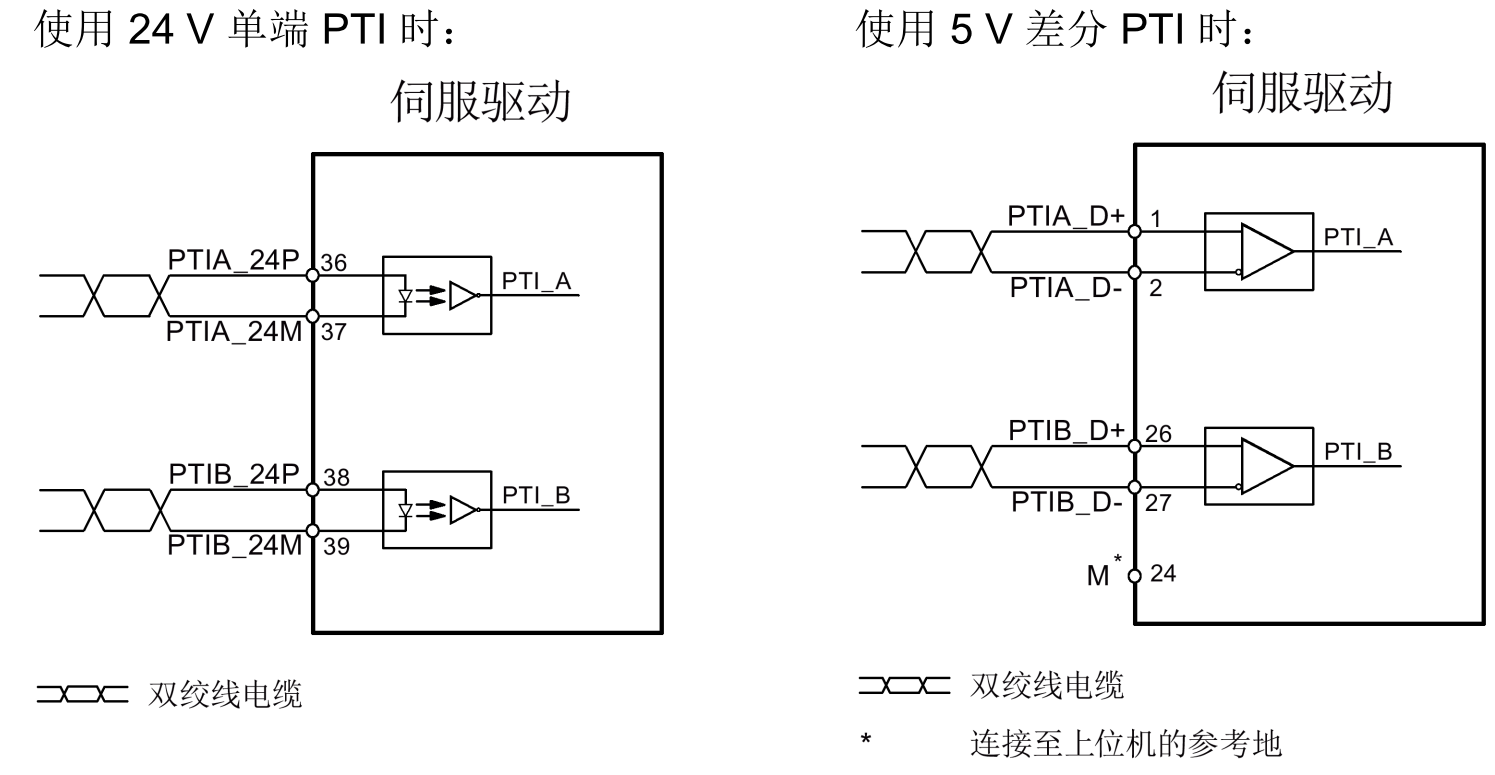
脈沖信號連接
支持下面兩種脈沖信號類型:
● 24 V 單端脈沖輸入
● 5 V 高速差分脈沖輸入(RS485)
S7-1200+V90 PTI位置控制
V90 PTI可以與S7-1200 配合使用,,通過脈沖輸出+方向信號控制V90實現(xiàn)位置控制,,本體集成的三個高速輸出點(Q0.0、Q0.1,、Q0.3)可通過 Micro/Win SMART 軟件中的運動控制向?qū)Х奖愕慕M態(tài)為脈沖輸出+方向信號控制通道,,可最多連接3個V90實現(xiàn)定位控制。
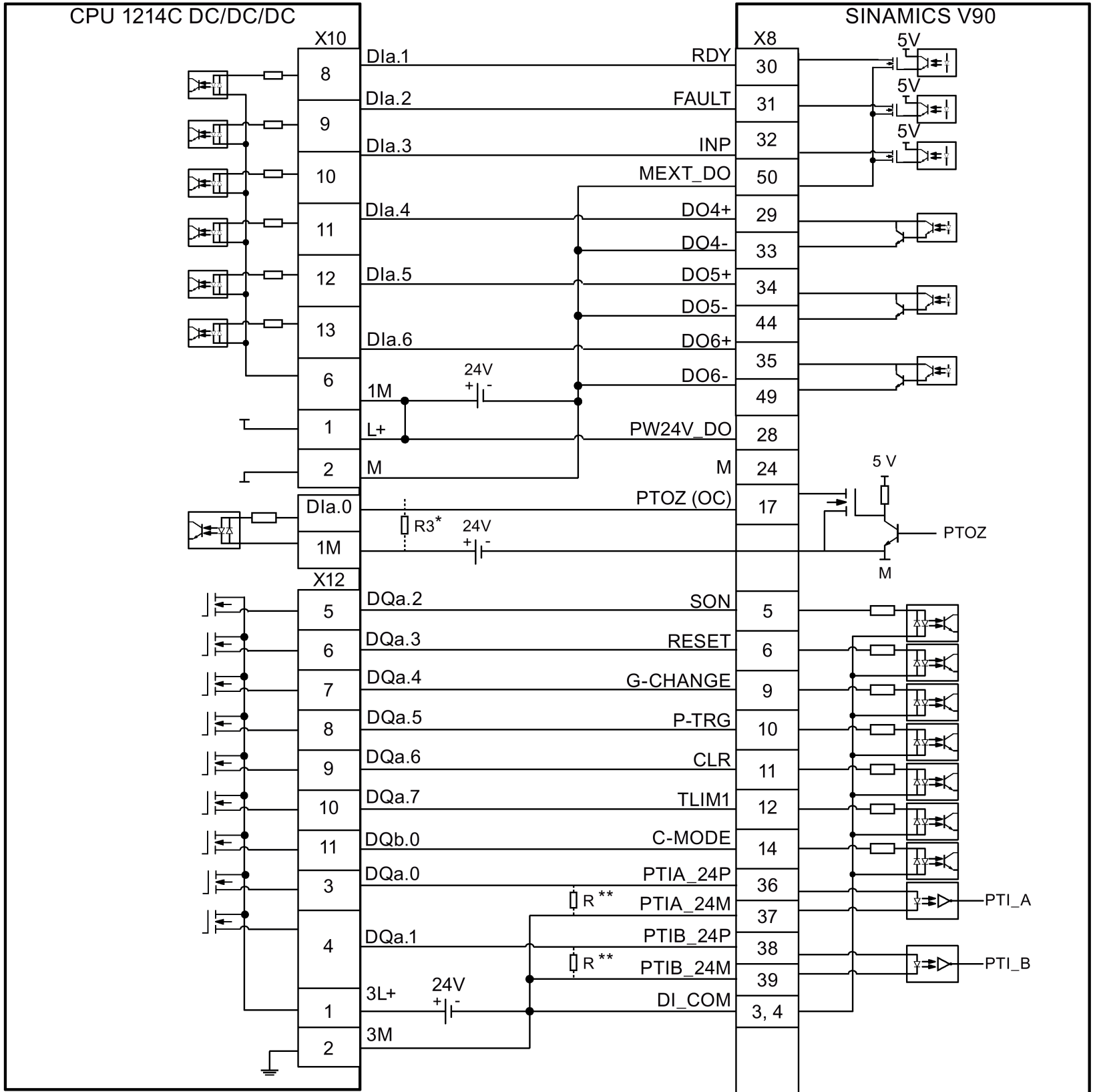
1. 1200 與 V90的接線
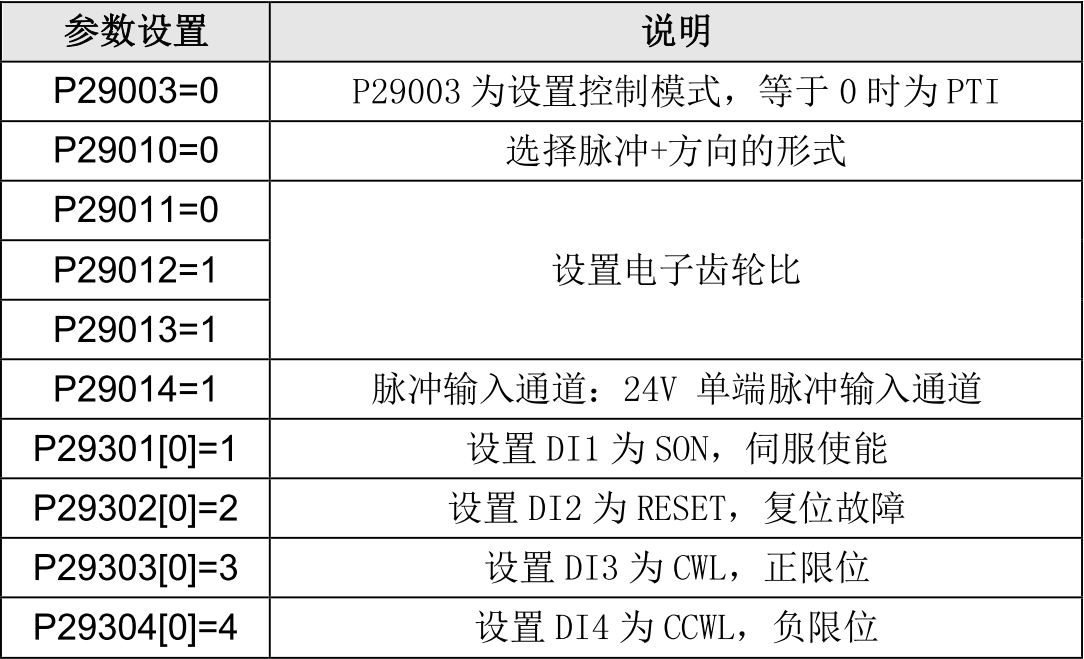
2. V90參數(shù)設(shè)置:
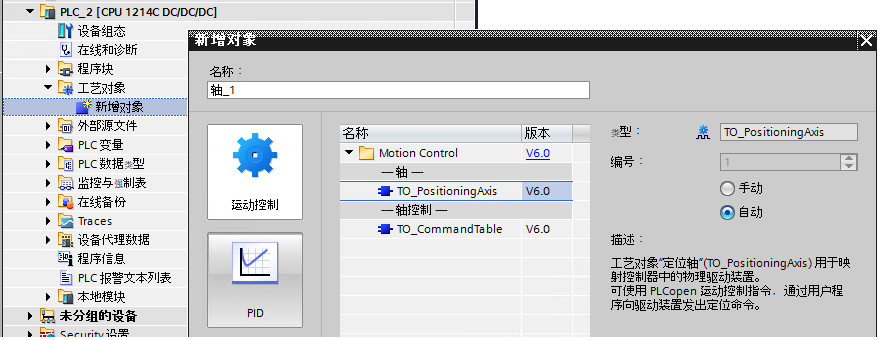
3. 在博途中添加軸工藝對象
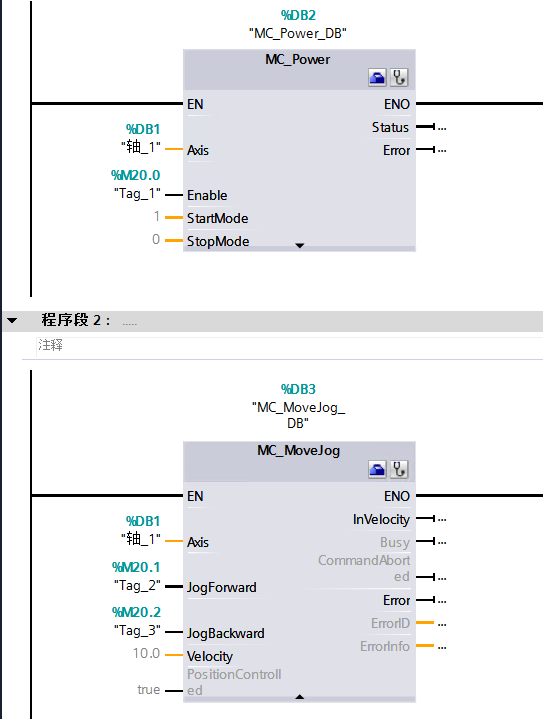
4. 在OB1中調(diào)用運動控制程序
常問問題
 PTI模式下上電后運行電機不轉(zhuǎn)怎么辦,?
PTI模式下上電后運行電機不轉(zhuǎn)怎么辦,?
驅(qū)動器給出伺服使能信號(SON=1)后無法運行,,有如下可能:
(1)如果給出SON后驅(qū)動器READY信號為0:
• 檢查CWL,CCWL,EMGS信號是否為1(高電平)
• 檢查驅(qū)動器是否有故障或報警
排除上述原因后,重新給出SON信號,,驅(qū)動器READY信號為1后可發(fā)送脈沖控制驅(qū)動器運行,。
(2)如果給出SON后驅(qū)動器READY信號為1:
• 檢查驅(qū)動器的電子齒輪比設(shè)置
• 檢查脈沖信號類型設(shè)置及脈沖信號接線是否正確。
V90的電子齒輪比設(shè)置,?
電子齒輪比是用來放大或縮小從上級控制器所獲得的脈沖頻率,。電子齒輪比的分子是電機編碼器轉(zhuǎn)一圈的脈沖個數(shù),其分母是使電機轉(zhuǎn)一圈通過上級控制器所發(fā)出的脈沖數(shù)。
V90 脈沖控制模式下定位不準怎么辦,?
• 檢查驅(qū)動器電子齒輪比設(shè)置與PLC設(shè)置是否對應,;
• 測試驅(qū)動器接收到的脈沖個數(shù)與PLC發(fā)送的脈沖個數(shù)是否對應;
• 檢查機械設(shè)備是否有卡阻,。
PTI模式下,,如何查看V90接收到的脈沖個數(shù)?
可以通過以下方法查看驅(qū)動器接收到的脈沖個數(shù):
• 查看參數(shù)R482[1];
• 通過調(diào)試軟件V-ASSISTANT左側(cè)項目樹:測試-測試接口-脈沖個數(shù),;
注意:V90顯示收到的脈沖個數(shù)是實際發(fā)送脈沖的4倍,,這是因為上位機輸出的脈沖到驅(qū)動后會進行4倍頻導致的。
所有型號的1200 都可以控制V90 PTI嗎,?
• DC/DC/DC型的1200 PLC上配備有用于直接控制器的板載高速輸出可以直接控制V90 PTI;
• 繼電器輸出的CPU無法直接控制V90 PTI,,必須使用具有高速數(shù)字量輸出的信號板;
1200 可以控制幾個V90 PTI,?
1200 最多可以控制4個V90PTI進行定位控制,,不同型號的CPU及信號板可控制的數(shù)量見下表。

V90的PTI模式丟脈沖怎么辦,?
可從接線,、布線,、是否滿足相應EMC準則進行排查,。建議在脈沖信號上并聯(lián)200-500歐的電阻,,推薦使用的最小功率為 5 W。接線可以參考上邊實例中的接線圖,。
回零開關(guān)和限位開關(guān)應該連接到哪里,?
需要連接到PLC的數(shù)字量輸入。
 您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)















