西門子6SE6440-2UD33-7EB1
高性能矢量控制變頻器,,提供更高級(jí)的過載能力,、200% 額 定電流3s,、150% 額定電流 60s (5分鐘內(nèi))高質(zhì)量集成 PID 控制器(自動(dòng)調(diào)諧)一體式 A 級(jí) EMC 濾波器用于裝置使用與 Micromaster 420 相同的附件,,例如操作面板和濾波器
集成制動(dòng)斬波需要操作面板來(lái)操縱此裝置或修改工廠設(shè)置參數(shù),。400 系列是 Micromaster 變頻器系列的進(jìn)一步發(fā)展。 該系列變頻器基于先前版本的成功經(jīng)驗(yàn),,從而使其在電動(dòng)機(jī)控制領(lǐng)域廣泛運(yùn)用,。
PM330L 功率模塊符合在作為第二環(huán)境標(biāo)準(zhǔn)的 IEC 61800-3 對(duì)抗干擾性能的要求,。在與進(jìn)線電抗器組合使用時(shí),,進(jìn)線濾波器還可以將功率模塊發(fā)射的傳導(dǎo)干擾限制在標(biāo)準(zhǔn) IEC 61800-3 中定義的 Category C2 極限值范圍內(nèi),。當(dāng)與一個(gè)*基于 EMC 設(shè)計(jì)導(dǎo)則的裝置結(jié)合使用時(shí),,
安裝地點(diǎn)的極限值將符合對(duì)DI一環(huán)境的要求。
進(jìn)線濾波器適用于接地系統(tǒng)(帶星形接地點(diǎn)的 TN 或 TT 系統(tǒng)),。
變頻器日常使用中出現(xiàn)的一些問題,很多情況下都是因?yàn)樽冾l器參數(shù)設(shè)置不當(dāng)引起的,。西門子變頻器可設(shè)置的參數(shù)有幾千個(gè),只有系統(tǒng)地,、合適地,、準(zhǔn)確地設(shè)置參數(shù)才能充分利用變頻器性能。[1]
頻器控制方式的選擇由負(fù)荷的力矩特性所決定,,電動(dòng)機(jī)的機(jī)械負(fù)載轉(zhuǎn)矩特性根據(jù)下列關(guān)系式?jīng)Q定:
轉(zhuǎn)矩t與轉(zhuǎn)速n的關(guān)系根據(jù)負(fù)載種類大體可分為3種[2],。
(1)即使速度變化轉(zhuǎn)矩也不大變化的恒轉(zhuǎn)矩負(fù)載,此類負(fù)載如傳送帶,、起重機(jī),、擠壓機(jī),、壓縮機(jī)等。
(2)隨著轉(zhuǎn)速的降低,,轉(zhuǎn)矩按轉(zhuǎn)速的平方減小的負(fù)載,。此類負(fù)載如風(fēng)機(jī)、各種液體泵等,。
(3)轉(zhuǎn)速越高,,轉(zhuǎn)矩越小的恒功率負(fù)載。此類負(fù)載如軋機(jī),、機(jī)床主軸,、卷取機(jī)等。
變頻器提供的控制方式有v/f控制,、矢量控制,、力矩控制,。v/f控制中有線性v/f控制、拋物線特性v/f控制,。將變頻器參數(shù)p1300設(shè)為0,變頻器工作于線性
v/f控制方式,,將使調(diào)速時(shí)的磁通與勵(lì)磁電流基本不變,。適用于工作轉(zhuǎn)速不在低頻段的一般恒轉(zhuǎn)矩調(diào)速對(duì)象。
將p1300設(shè)為2,,變頻器工作于拋物線特性v/f控制方式,,這種方式適用于風(fēng)機(jī),、水泵類負(fù)載,。這類負(fù)載的軸功率n近似地與轉(zhuǎn)速n的3次方成正比,。其轉(zhuǎn)矩m近似地與轉(zhuǎn)速n的平方成正比,。對(duì)于這種負(fù)載,,如果變頻器的v/f特性是線性關(guān)系,,則低速時(shí)電機(jī)的許用轉(zhuǎn)矩遠(yuǎn)大于負(fù)載轉(zhuǎn)矩,從而造成功率因數(shù)和效率的嚴(yán)重下降,。為了適應(yīng)這種負(fù)載的需要,,使電壓隨著輸出頻率的減小以平方關(guān)系減小,從而減小電機(jī)的磁通和勵(lì)磁電流,,使功率因數(shù)保持在適當(dāng)?shù)姆秶鷥?nèi),。
可以進(jìn)一步通過設(shè)置參數(shù)使v/f控制曲線適合負(fù)載特性。將p1312在0至250之間設(shè)置合適的值,,具有起動(dòng)提升功能,。將低頻時(shí)的輸出電壓相對(duì)于線性的v/f曲線作適當(dāng)?shù)奶岣咭匝a(bǔ)償在低頻時(shí)定子電阻引起的壓降導(dǎo)致電機(jī)轉(zhuǎn)矩減小的問題。適用于大起動(dòng)轉(zhuǎn)矩的調(diào)速對(duì)象,。
變頻器v/f控制方式驅(qū)動(dòng)電機(jī)時(shí),,在某些頻率段,,電機(jī)的電流,、轉(zhuǎn)速會(huì)發(fā)生振蕩,嚴(yán)重時(shí)系統(tǒng)無(wú)法運(yùn)行,,甚至在加速過程中出現(xiàn)過電流保護(hù),,使得電機(jī)不能正常啟動(dòng),在電機(jī)輕載或轉(zhuǎn)矩慣量較小時(shí)更為嚴(yán)重,??梢愿鶕?jù)系統(tǒng)出現(xiàn)振蕩的頻率點(diǎn),在v/f曲線上設(shè)置跳轉(zhuǎn)點(diǎn)及跳轉(zhuǎn)頻帶寬度,,當(dāng)電機(jī)加速時(shí)可以自動(dòng)跳過這些頻率段,,保證系統(tǒng)能夠正常運(yùn)行。從p1091至p1094可以設(shè)定4個(gè)不同的跳轉(zhuǎn)點(diǎn),,設(shè)置p1101確定跳轉(zhuǎn)頻帶寬度,。
有些負(fù)載在特定的頻率下需要電機(jī)提供特定的轉(zhuǎn)矩,用可編程的v/f控制對(duì)應(yīng)設(shè)置變頻器參數(shù)即可得到所需控制曲線,。設(shè)置p1320,、p1322,、p1324確定可編程的v/f特性頻率座標(biāo),對(duì)應(yīng)的p1321,、p1323,、p1325為可編程的v/f 特性電壓座標(biāo)。
參數(shù)p1300設(shè)置為20,,變頻器工作于矢量控制,。這種控制相對(duì)完善,調(diào)速范圍寬,,低速范圍起動(dòng)力矩高,,精度高達(dá)0.01%,響應(yīng)很快,,高精度調(diào)速都采用svpwm矢量控制方式
參數(shù)p1300設(shè)置為22,,變頻器工作于矢量轉(zhuǎn)矩控制。這種控制方式是目前上*的控制方式,,其他方式是模擬直流電動(dòng)機(jī)的參數(shù),,進(jìn)行保角變換而進(jìn)行調(diào)節(jié)控制的,矢量轉(zhuǎn)矩控制是直接取交流電動(dòng)機(jī)參數(shù)進(jìn)行控制,,控制簡(jiǎn)單,,精確度高。
西門子變頻器(圖1)
對(duì)于(6),、(7)兩點(diǎn)應(yīng)補(bǔ)充說明的是,,采用FCS系統(tǒng),節(jié)省投資的效果是不用懷疑的,,但是否如有的專家所說達(dá)60~66%,。這些數(shù)字在多篇文章中出現(xiàn),編者認(rèn)為這是相互轉(zhuǎn)摘的結(jié)果,,目前還未找到這些數(shù)字的原始出處,,因此,讀者在引用這些數(shù)字時(shí)要慎重,。
?。?)FCS相對(duì)于DCS組態(tài)簡(jiǎn)單,由于結(jié)構(gòu),、性能標(biāo)準(zhǔn)化,,便于安裝、運(yùn)行,、維護(hù),。
(9)用于過程控制的FCS設(shè)計(jì)開發(fā)要點(diǎn)。這一點(diǎn)并不作為與DCS的比較,,只是說明用于過程控制或者說用于模擬連續(xù)過程類的FCS在設(shè)計(jì)開發(fā)中應(yīng)重點(diǎn)考慮的問題,。
1)要求總線本安防爆功能,而且是頭等重要的,。
2)基本監(jiān)控如流量,、料位、溫度,、壓力等的變化是緩慢的,,而且還有滯后效應(yīng),因此,,節(jié)點(diǎn)監(jiān)控并不需要快電子學(xué)的響應(yīng)時(shí)間,,但要求有復(fù)雜的模擬量處理能力。這一物理特征決定了系統(tǒng)基本上多采用主一從之間的集中輪詢制,,這在技術(shù)上是合理的,,在經(jīng)濟(jì)上是有利的。
4. 熱電偶的信號(hào)處理方式
4.1 硬件組態(tài)設(shè)置
首先要在硬件組態(tài)選擇與外部補(bǔ)償接線*的measuring type(測(cè)量類型),,measuring range(測(cè)量范圍),,reference junction(參比接點(diǎn)類型)和reference temperature(參比接點(diǎn)溫度)的參數(shù),如下各圖所示,。
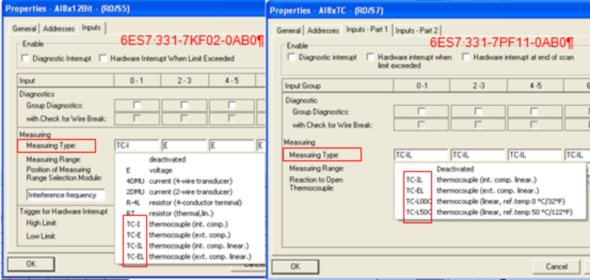
圖10 S7-300模板測(cè)量方式示意圖
圖11 S7-300模板測(cè)量范圍示意圖
對(duì)于S7-300的模板,,組態(tài)如圖10和11所示,只需要選擇測(cè)量類型和測(cè)量范圍(分度類型),,補(bǔ)償方式包含在測(cè)量類型中,。比如: 參比接點(diǎn)固定溫度補(bǔ)償方式,測(cè)量類型選擇 TC-L00C(參比接點(diǎn)溫度固定為0℃) 或 TC-L50C(參比接點(diǎn)溫度固定為50℃),,再選擇分度類型,,組態(tài)就完成。
圖12 S7-400模板組態(tài)圖1
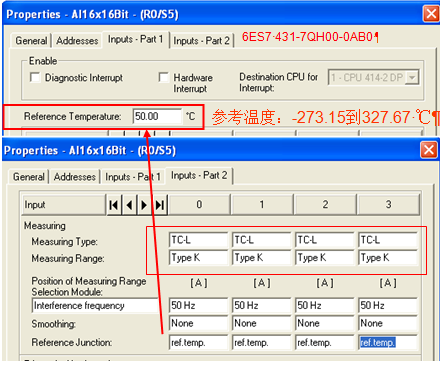
圖13 S7-400模板組態(tài)圖2
對(duì)于S7-400的模板,,組態(tài)如圖12和13所示,,測(cè)量類型中選擇TC-L方式,,測(cè)量范圍中選擇與實(shí)際熱電偶類型*的分度號(hào),,參比接點(diǎn)的選擇。比如:參比接點(diǎn)固定溫度的方式,,測(cè)量類型和測(cè)量范圍選擇完后,,在參比接點(diǎn)選擇ref.temp(參考溫度),然后在reference temperature框(參考溫度)內(nèi)填寫參比接點(diǎn)的固定,,組態(tài)就完成,,或者是共享補(bǔ)償方式,可以用SFC55動(dòng)態(tài)傳輸溫度參數(shù),。
| 400模板組態(tài)中Reference junction 參數(shù) | 說 明 |
| none | 無(wú)補(bǔ)償 |
| internet | 模板內(nèi)部補(bǔ)償 |
| Ref. temp | 參比接點(diǎn)溫度固定已知補(bǔ)償 |
表12 參比接點(diǎn)參數(shù)說明
4.2 測(cè)量方式和轉(zhuǎn)換處理
| CPU類型 | 測(cè)量方法 | 說 明 |
| 300CPU | TC-I | 內(nèi)部補(bǔ)償 |
| TC-E | 外部補(bǔ)償 |
| TC-IL | 線性,,內(nèi)部補(bǔ)償 |
| TC-EL | 線性,,外部補(bǔ)償 |
| TC-L00C | 線性,參比接點(diǎn)溫度保持在0°C |
| TC-L50C | 線性,,參比接點(diǎn)溫度保持在50°C |
| 400CPU | TC-L 線性 |
表13 測(cè)量方式各參數(shù)的說明及處理
西門子6SE6440-2UD33-7EB1
USS通信原理與編程的實(shí)現(xiàn)
4.1 S7 1200 PLC與MM440 通過USS通信的基本原理
S7 1200提供了專用的USS庫(kù)進(jìn)行USS通信,,如圖6所示:

圖6:S7 1200 專用的USS庫(kù)
USS_DRV功能塊通過USS_DRV_DB數(shù)據(jù)塊實(shí)現(xiàn)與USS_PORT功能塊的數(shù)據(jù)接收與傳送,而USS_PORT功能塊是S7-1200 PLC CM1241 RS485模塊與MM440之間的通信接口,。USS_RPM功能塊和USS_WPM功能塊與MM440的通信與USS_DRV功能塊的通信方式是相同的,。如圖7所示。

圖7:通信結(jié)構(gòu)圖
4.2. 功能塊使用介紹
USS_DRV 功能塊是S7-1200 USS通信的主體功能塊,,接受MM440的信息和控制MM440的指令都是通過這個(gè)功能快來(lái)完成的,。必須在主 OB中調(diào)用。
USS_PORT功能塊是S7-1200與MM440進(jìn)行USS通信的接口,,主要設(shè)置通信的接口參數(shù),。可在主OB或中斷OB中調(diào)用,。
USS_RPM功能塊是通過USS通信讀取MM440的參數(shù),。必須在主 OB中調(diào)用。
USS_WPM功能塊是通過USS通信設(shè)置MM440的參數(shù),。必須在主 OB中調(diào)用,。
4.3. S7 1200 PLC進(jìn)行USS通信的編程
4.3.1. USS_DRV功能塊的編程
USS_DRV功能塊的編程如圖8所示。

圖8: USS_DRV功能塊的編程
USS_DRV功能塊用來(lái)與MM440進(jìn)行交換數(shù)據(jù),,從而讀取MM440的狀態(tài)以及控制MM440的運(yùn)行,。每個(gè)MM440使用一的一個(gè)USS_DRV功能塊,但是同一個(gè)CM1241 RS485模塊的USS網(wǎng)絡(luò)的所有MM440(最多16個(gè))都使用同一個(gè)USS_DRV_DB
| USS_DRV_DB: MM440進(jìn)行USS通信的數(shù)據(jù)塊,。 |
|
| RUN: DB塊的MM440啟動(dòng)指令,。 |
|
|
| OFF2: 緊急停止,自由停車,。 該位為0時(shí)停車,。 |
|
| OFF3: 快速停車,帶制動(dòng)停車,。該位為0時(shí)停車,。 |
|
| F_ACK: MM440故障確認(rèn)。 |
|
|
| DIR : MM440控制電機(jī)的轉(zhuǎn)向,。 |
|
|
| SPEED_SP: MM440的速度設(shè)定值,。 |
|
|
| NDR: 新數(shù)據(jù)就緒。 |
|
|
|
| ERROR: 程序輸出錯(cuò)誤,。 |
|
|
|
| RUN_EN: MM440運(yùn)行狀態(tài)指示,。 |
|
|
| D_DIR: MM440運(yùn)行方向狀態(tài)指示。 |
|
|
| INHIBIT: MM440是否被禁止的狀態(tài)指示。 |
|
| FAULT: MM440故障,。 |
|
|
|
| SPEED: MM440的反饋的實(shí)際速度值,。 |
|
|
| DRIVE: MM440的USS站地址。MM440參數(shù)P2011設(shè)置,。 |
| PZD_LEN: PZD數(shù)據(jù)的字?jǐn)?shù),,有效值2,4,,6或8個(gè)字,。MM440參數(shù)P2012設(shè)置。 |
 您好, 歡迎來(lái)到化工儀器網(wǎng)
您好, 歡迎來(lái)到化工儀器網(wǎng)















