西門子變頻器6SE6440-2UD33-0EB1
西門子變頻器MICROMASTER系列中包含MM420,,MM430,MM440三種類型的變頻器,。在自動化控制系統(tǒng)的驅(qū)動控制中,,西門子變頻器MM4系列和西門子PLC之間需要進(jìn)行通訊來實現(xiàn)數(shù)據(jù)的交換任務(wù),。用戶需要通過上位機或觸摸屏對通過西門子PLC來實現(xiàn)對西門子變頻器的遠(yuǎn)程控制。在西門子PLC的眾多系列中,,與西門子變頻器之間常用的通訊方式是USS通訊方式,。本文下面就對西門子PLC與西門子變頻器之間的USS通訊的錯誤代碼做一個介紹,供用戶在實際使用過程中進(jìn)行參考,。
二,、西門子變頻器MM4的USS通訊錯誤代碼
西門子變頻器MM4系列與西門子PLC的多個系列都可以實現(xiàn)USS通訊,下面對它們之間的USS通訊錯誤代碼進(jìn)行說明:
其中錯誤代碼的范圍是0-10,,用戶在使用過程中,,如果出現(xiàn)了這些錯誤代碼,可以對照下面的說明進(jìn)行排查故障,,
1. 錯誤代碼0:表示無錯誤,;
2. 錯誤代碼1:表示驅(qū)動裝置無響應(yīng);
3. 錯誤代碼2:表示來自驅(qū)動的響應(yīng)中檢測到校驗和錯誤,;
4. 錯誤代碼3:表示來自驅(qū)動的響應(yīng)中檢測到奇偶校驗錯誤,;
5. 錯誤代碼4:表示用戶程序干擾引起錯誤;
6. 錯誤代碼5:表示嘗試執(zhí)行非法命令,;
7. 錯誤代碼6:表示提供了無效的驅(qū)動裝置地址,;
8. 錯誤代碼7:表示通信口未定義為 USS 協(xié)議;
9. 錯誤代碼8:表示通信口忙于處理其他指令,;
10. 錯誤代碼9:表示驅(qū)動裝置速度設(shè)定輸入值超限,;
11. 錯誤代碼10:表示驅(qū)動裝置返回的信息長度不正確;
當(dāng)西門子變頻器MM440的操作面板顯示以“A"開頭的4位數(shù)字時,,表示變頻器出現(xiàn)了報警信息,;如果出現(xiàn)以“F"開始的4位數(shù)字時,表示變頻器出現(xiàn)故障,,需要用戶進(jìn)行處理,。
如果用戶通過操作面板對電機進(jìn)行啟動操作,而電機沒有啟動時,,通??梢园凑杖缦虏襟E進(jìn)行排查:
1. 檢查參數(shù)設(shè)置,P0700是否設(shè)定正確,,1-通過操作面板進(jìn)行操作,,2-通過數(shù)字量端子進(jìn)行控制;
2. 檢查參數(shù)設(shè)置,,P0010是否設(shè)置正確,,P0010的含義是快速調(diào)試;
3. 確認(rèn)給出的電機啟動信號是否正常,;
4. 檢查參數(shù)設(shè)置,,P1000信號源與實際設(shè)定是否對應(yīng),,例如:若用戶設(shè)定通過外部端子給定變頻器的頻率,則在相應(yīng)的端子上確認(rèn)是否給定了電壓信號,;
5. 需要注意的是,,電動機的參數(shù),如:電壓,,功率等需要和西門子變頻器的參數(shù)匹配,。
(1) 工業(yè)過程自動化新一代主控系統(tǒng)及其綜合自動化的開發(fā)和產(chǎn)業(yè)化,主要包括集散控制系統(tǒng)(DCS),,現(xiàn)場總線控制系統(tǒng)(FCS)和以工業(yè)計算機為基礎(chǔ)的開放式控制系統(tǒng)等,。重點支持若干具有工業(yè)過程綜合自動化系統(tǒng)產(chǎn)業(yè)化能力和開放能力的企業(yè),發(fā)展具有市場竟?fàn)幜Φ漠a(chǎn)品,,同時適當(dāng)支持建設(shè)工業(yè)過程自動化的工程化驗證環(huán)境與開發(fā)能力,。
??(2) *控制與優(yōu)化軟件開發(fā)與產(chǎn)業(yè)化,主要包括*控制技術(shù),,過程優(yōu)化技術(shù),,實時監(jiān)控軟件平臺,信息集成軟件平臺,,系統(tǒng)集成技術(shù)等,,專項將重點支持上述具有特色和市場價值的系列軟件的產(chǎn)業(yè)化。
??(3) 智能儀表,,執(zhí)行器與變送器,,成套控制裝置和成套優(yōu)化系統(tǒng)的開發(fā)與產(chǎn)業(yè)化。
??就第(1)點而言,,特別強調(diào)了“工業(yè)過程自動化新一代主控系統(tǒng)及其綜合自動化的開發(fā)和產(chǎn)業(yè)化,。其“綜合自動化"就是要打破傳統(tǒng)的計算機、PLC,、DCS的分工界限,,構(gòu)成有機組成的三電一體化的綜合自動化系統(tǒng)。自從我們1984年提出“三電一體化的綜合自動化系統(tǒng)"的觀點以來,,十幾年來的事實證明這種預(yù)計是正確的,。促成這種轉(zhuǎn)變的動力是科學(xué)技術(shù)的發(fā)展,是計算機技術(shù),、網(wǎng)絡(luò)技術(shù),、數(shù)據(jù)庫技術(shù)、顯示技術(shù)及多媒體技術(shù)的發(fā)展,,而這種發(fā)展并沒有停止,,并涵蓋著更多更廣泛的內(nèi)容,如語音技術(shù)、有線和無線通信技術(shù),,Web信息服務(wù)技術(shù)等,。所以,,當(dāng)今“綜合自動化"的內(nèi)涵有著更深刻,、更廣泛的含義,甚至可以包容我們工作,,生活的各個方面,。
??2 生產(chǎn)過程自動化系統(tǒng)和生產(chǎn)管理系統(tǒng)的融合
??在ISO的六層功能模型中,把從檢測,、執(zhí)行,、驅(qū)動到公司(總廠)一級的控制和管理共分成六層功能。構(gòu)成這種多層功能結(jié)構(gòu)的出發(fā)點,,是按工廠經(jīng)營,、生產(chǎn)管理、控制功能的劃分,,而不是按控制和管理計算機系統(tǒng)硬件結(jié)構(gòu)來劃分的,。只不過過去,特別是七十年代和八十年代初,,由于當(dāng)初計算機技術(shù)和網(wǎng)絡(luò)技術(shù)的限制,,以及計算機系統(tǒng)設(shè)計人員理解的不充分,*以來,,把工廠的計算機系統(tǒng)按六層功能模型相對應(yīng)的分成六級計算機系統(tǒng)的多層次結(jié)構(gòu),。
??隨著計算機技術(shù)和網(wǎng)絡(luò)技術(shù)的發(fā)展,越來越暴露這種多層次計算機系統(tǒng)在數(shù)據(jù)采集,,管理,,數(shù)據(jù)和知識的共享,硬軟件資源共享,,數(shù)據(jù)通信,,軟件開發(fā)等等中的各種弊端,特別是在設(shè)備控制,,過程控制,,生產(chǎn)控制之間。以至很早就有人提出管控一體化,,或者控制系統(tǒng)就是管理系統(tǒng)的觀點,。美國西屋過程控制的WDPF Ovation系統(tǒng)就是基于這種觀點開發(fā)的,可以預(yù)計今后更多的工業(yè)過程自動化系統(tǒng)將會朝著這個方向發(fā)展,。
??3 軟PLC和軟DCS
??由于計算機技術(shù),,特別是芯片技術(shù)的快速發(fā)展,按照摩爾定律微處器芯的速度性能每18個月將提高一倍。因此,,當(dāng)Intel Pentium處理器問世后不久,,Pentium 2,3以及主頻為1.4GHz的Pentium 4處理器就相繼提供給市場,。當(dāng)廣大用戶還未來得及使用Pentium 4處理器時,,5月29日Intel和HP兩家公司就聯(lián)合推出了64位的Itanium微處理器。自動化系統(tǒng)設(shè)備制造商和集成商難以跟上硬件技術(shù)的發(fā)展,,往往出現(xiàn)自動化系統(tǒng)設(shè)備制造商和集成商的自動化系統(tǒng)設(shè)備的更新,,發(fā)展。滯后于計算機技術(shù)的發(fā)展,。(5)可編程控制器的輸出負(fù)載可能產(chǎn)生噪聲干擾,,因此要采取措施加以抑制。
此外,,對于能使用戶造成傷害的危險負(fù)載,,除了在控制程序中加以考慮之外,應(yīng)設(shè)計外部緊急停車電路,,使得可編程控制器發(fā)生故障時,,能將引起傷害的負(fù)載電源切斷。
交流輸出線和直流輸出線不要用同一根電纜,,輸出線應(yīng)盡量遠(yuǎn)離高壓線和動力線,,避免并行。
?機器人控制
?掃描器,,條碼閱讀器,,等
特殊功能塊包括在通信功能手冊的供貨范圍之內(nèi)。
使用多點接口 (MPI) 進(jìn)行數(shù)據(jù)通信
MPI(多點接口)是集成在 SIMATIC S7-300 CPU 上的通信接口,。它可用于簡單的網(wǎng)絡(luò)任務(wù),。
?MPI 可以同時連接多個配有 STEP 7 的編程器/PC、HMI 系統(tǒng)(OP/OS),、S7-300 和 S7-400,。
?全局?jǐn)?shù)據(jù):
“全局?jǐn)?shù)據(jù)通信"服務(wù)可以在聯(lián)網(wǎng)的 CPU 間周期性地進(jìn)行數(shù)據(jù)交換。 一個 S7-300 CPU 可與多達(dá) 4 個數(shù)據(jù)包交換數(shù)據(jù),,每個數(shù)據(jù)包含有 22 字節(jié)數(shù)據(jù),,可同時有 16 個 CPU 參與數(shù)據(jù)交換(使用 STEP 7 V4.x)。?
例如,,可以允許一個 CPU 訪問另一個 CPU 的輸入/輸出,。只可通過 MPI 接口進(jìn)行全局?jǐn)?shù)據(jù)通信。
?內(nèi)部通信總線(C-bus):
CPU 的 MPI 直接連接到 S7-300 的 C 總線,。因此,,可以通過 MPI 從編程器直接找到與 C 總線連接的 FM/CP 模塊的地址,。
對于各種PLC的現(xiàn)場硬件組態(tài)和軟件調(diào)試,通常有經(jīng)驗的工程師應(yīng)該先花一些時間對自己的現(xiàn)場工作進(jìn)行一個簡單的規(guī)劃,,通常應(yīng)當(dāng)采取如下的步驟:
(1) 系統(tǒng)的規(guī)劃
首先,,必須深入了解系統(tǒng)所需求的功能,并調(diào)查可能的控制方法,,同時與用戶或設(shè)計院共同探討之操作程序,,根據(jù)所歸納之結(jié)論來擬定系統(tǒng)規(guī)劃,決定所采行的PLC系統(tǒng)架構(gòu),、所需之I/O點數(shù)與I/O模塊型式,。
(2) I/O模塊選擇與地址設(shè)定
當(dāng)I/O模塊選妥后,,依據(jù)所規(guī)劃之I/O點使用情形,,由PLC的CPU系統(tǒng)自動設(shè)定I/O地址,或由使用者自定I/O模塊的地址,。
(3) 梯形圖程序的編寫與系統(tǒng)配線
在確定好實際的I/O地址之后,,依據(jù)系統(tǒng)需求的功能,開始著手梯形圖程序的編寫,。同時,,I/O之地址已設(shè)定妥當(dāng),故系統(tǒng)之配線亦可著手進(jìn)行,。
(4) 梯形圖程序的仿真與修改
在梯形圖程序撰寫完成后,,將程序?qū)懭隤LC,便可先行在PC與OpenPLC系統(tǒng)做在線連接,,以執(zhí)行在線仿真作業(yè),。倘若程序執(zhí)行功能有誤,則必須進(jìn)行除錯,,并修改梯形圖程序,。
(5) 系統(tǒng)試車與實際運轉(zhuǎn)
在線上程序仿真作業(yè)下,若梯形圖程序執(zhí)行功能正確無誤,,且系統(tǒng)配線亦完成后,,便可使系統(tǒng)納入實際運轉(zhuǎn),項目計劃亦告完成,。
(6)程序注釋和歸檔
為確保日后維修的便利,,要將試車無誤可供實際運轉(zhuǎn)的梯形圖程序做批注,并加以整理歸檔,,方能縮短日后維修與查閱程序之時間,。這是職業(yè)工程師的良好習(xí)慣,無論對今后自己進(jìn)行維護(hù),,或者移交用戶,,這都會帶來*的便利,,而且是你的職業(yè)水準(zhǔn)的一個體現(xiàn)。
以上工作中,,復(fù)雜的系統(tǒng)規(guī)劃可能需要幾天甚至更長的時間,,但一個簡單的系統(tǒng)規(guī)劃在一個具有良好的職業(yè)習(xí)慣的編程工程師手中,可能只需要幾個小時,。
西門子變頻器6SE6440-2UD33-0EB1

選擇驅(qū)動為MM440驅(qū)動器,,如圖5所示
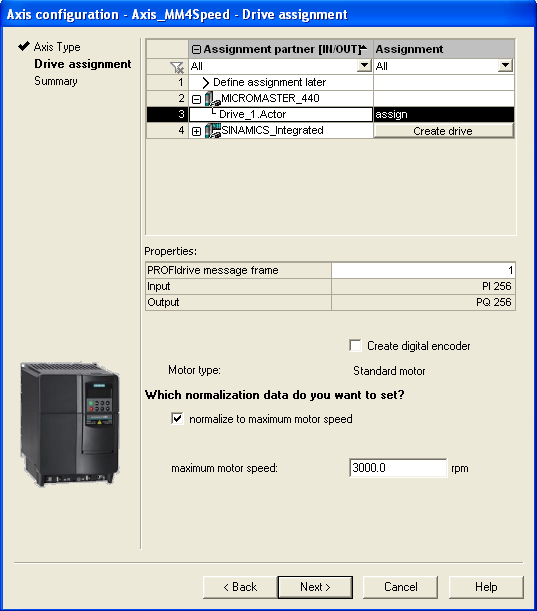
圖5.選擇MM440驅(qū)動
西門子6SE6440-2UD33-0EB1
(7)在SCOUT項目中編寫控制MM440速度軸的程序,如圖6所示
 SIEMENS西門子6SE6440-2UD25-5CA1
SIEMENS西門子6SE6440-2UD25-5CA1
圖6.編寫MM440速度軸的控制程序
4項目實例
D435控制MM440速度軸的配置示例程序請參考附帶文件:
SimotionControlMM440.Zip
此FAQ適用于MICROMASTER 430 和 MICROMASTER 440 變頻器,。
描述
DIM 模塊 (數(shù)據(jù)接口模塊)是用來連接BOP插槽和控制模塊之間的模塊,。
對于MICROMASTER 430 / 440 (結(jié)構(gòu)尺寸D 到F),DIM 模塊可以做為備件采購,詳細(xì)定貨號[MLFB]6SE6400-7AA00-0AF0。
它是由單個的組件組成, 具體由下列三部分組成:
| 組件號,,非訂貨號 |
| DIM 模塊 | 組件號.: MC1790L816B01 |
| OP 支架 | 組件號.: A5E00182243 |
| 連接電纜 | 組件號.: A5E00331744 |
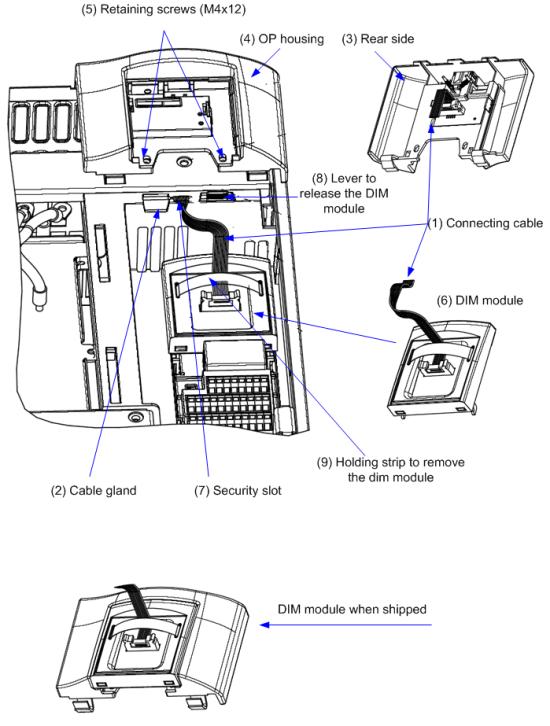
裝配
把要連接的線纜(1)的一端穿過密封孔(2),插入到OP支架(4)背面(3)的插槽內(nèi).
把OP支架連接到變頻器上, 卡在為支架預(yù)留的位置(5)上, 結(jié)構(gòu)尺寸 F ,并用 2 x M4 x 12 screws (0.8Nm) 螺釘固定.
把DIM接口板(6)插入預(yù)先提供的插槽內(nèi),把線纜的另一端插到DIM接口板的插槽內(nèi),并且把線纜移入安全槽(7)內(nèi).
注解:
通過向上壓解鎖手柄(8), 同時向外拉接口模板上的夾條(9),接口模板(6)能夠被拆下來. ,。
 您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)















