6ES7131-4CD02-0AB0
SIMATIC ET 200M
針對(duì)帶有 S7-300 的高密度通道應(yīng)用的 I/O 站

說明
SIMATIC ET 200M 是針對(duì)具有高密度通道應(yīng)用的控制柜的模塊式 I/O 站使用接口模塊可以連接 profibus 和 PROFINET-還可以選擇使用光纜連接 Profibus,。ET 200M 可以用于標(biāo)準(zhǔn)應(yīng)用,也可用于安全應(yīng)用,。多可以有 12 個(gè)多通道信號(hào)模塊(例如 64 個(gè)數(shù)字輸入)和功能模塊以及 S7-300 通訊處理器可以用作 I/O 模塊——與過程的接口,。ET 200M 支持帶有擴(kuò)展用戶數(shù)據(jù)的模塊,,如具有 HART minor 變量的 HART 模塊。除了成熟的連接技術(shù),,ET 200M 還可以提供絕緣部署方法 Fast Connect,,用于快速接線。
應(yīng)用領(lǐng)域
ET 200M 特別適用于用戶*或復(fù)雜的自動(dòng)化任務(wù),??蓱?yīng)用的帶有 HART 的擴(kuò)展模擬輸入或輸出模塊可以優(yōu)化 ET 200M 用于過程工程組態(tài)。要求高等級(jí)的可用性的應(yīng)用,,可以與諸如 S7-400H 或 S7-400F/FH 這樣的冗余系統(tǒng)相組合來實(shí)現(xiàn),。
優(yōu)點(diǎn)
設(shè)計(jì)和功能
模塊式的 I/O 系統(tǒng) ET 200M 包括了接口模塊(在冗余設(shè)計(jì)情況下 2IM),和多 12 個(gè) I/O 模塊,。沒有插槽規(guī)則,。根據(jù)主模塊數(shù)量框架的各種類型的 I/O 模塊都可以插入。
SIMATIC S7-300 使用連接器的簡單結(jié)構(gòu)使 ET 200M 應(yīng)用靈活,,而且維修友好性高:
總線模塊跳到 DIN 導(dǎo)軌上,,使用縱向插入的連接器從側(cè)面對(duì)接固定。然后這些模塊安裝到總線模塊上,,并用螺絲固定到位,,與總線模塊接頭建立接觸。非占用槽上連接器用總線背板蓋保護(hù)起來,。總線模塊蓋插入到后一個(gè)總線模塊的側(cè)面,。背板總線集成到了模塊上,。有源總線模塊允許在工作中更換(熱插拔)。ET 200M 連接到一個(gè) S7-400 上的 profibus 上之后,,控制器就可以在正常運(yùn)行情況下進(jìn)行組態(tài)了(運(yùn)行中組態(tài) – CiR)
1)運(yùn)行速度高,,S7416執(zhí)行一條二進(jìn)制指令只要0.08μs。
2)存儲(chǔ)器容量大,,例如CPU417.4的RAM可以擴(kuò)展到16MB,,裝載存儲(chǔ)器(FEPROM或RAM)可以擴(kuò)展到64MB。
3) I/O擴(kuò)展功能強(qiáng),,可以擴(kuò)展21個(gè)機(jī)架,,S7417-4最多可以擴(kuò)展262144個(gè)數(shù)字量I/O點(diǎn)和16384個(gè)模擬量I/O。
4)有*的通信能力,,容易實(shí)現(xiàn)分布式結(jié)構(gòu)和冗余控制系統(tǒng),,集成的MPI(多點(diǎn)接口)能建立最多32個(gè)站的簡單網(wǎng)絡(luò)。大多數(shù)CPU集成有PROFIBUS-DP主站接口,,可以用來建立高速的分布式系統(tǒng),,使操作大大簡化,。從用戶的角度看,分布式I/O的處理與集中式I/O沒有什么區(qū)別,,具有相同的配置,、尋址和編程方法。CPU能與在通信總線和MPI上的站點(diǎn)建立聯(lián)系,,最多16~ 44個(gè)站點(diǎn),,通信速率最高12Mbit/s。
5)通過鑰匙開關(guān)和口令實(shí)現(xiàn)安全保護(hù),。
6)診斷功能強(qiáng),,的故障和中斷時(shí)間保存在FIFO(先入先出)緩沖區(qū)中。
7)集成的HMI(人機(jī)接口)服務(wù),,用戶只需要為HMI服務(wù)定義源和目的地址,,系統(tǒng)會(huì)自動(dòng)地傳送信
S7-400由機(jī)架、電源模塊(PS),、中央處理單元(CPU),、數(shù)字量輸入/輸出(DI/DO)模塊、模擬量輸入輸出( AI/AO)模塊,、通信處理器(CP),、功能模塊(FM)和接口模塊(IM)組成。DI/DO模塊和AI/AO模塊統(tǒng)稱為信號(hào)模塊(SM),。
S7-400的模塊插座焊在機(jī)架中的總線連接板上,,模塊插在模塊插座上,有不同槽數(shù)的機(jī)架供用戶選用,,如果一個(gè)機(jī)架容納不下所有的模塊,,可以增設(shè)一個(gè)或數(shù)個(gè)擴(kuò)展機(jī)架,各機(jī)架之間通過接口模塊和通信電纜交換信息,。
S7 -400提供了多種級(jí)別的CPU模塊和種類齊全的通用功能模塊,,使用戶能根據(jù)需要組合成不同的系統(tǒng)。S7-400采用模塊化設(shè)計(jì),,性能不同的模塊可以靈活組合,,擴(kuò)展十分方便。
中央機(jī)架(或稱中央控制器,,CC)必須配置CPU模塊和一個(gè)電源模塊,,可以安裝除用于接收的IM(接口模塊)外的所有S7-400模塊。如果有擴(kuò)展機(jī)架,,中央機(jī)架和擴(kuò)展機(jī)架都需要安裝接口模塊,。
擴(kuò)展機(jī)架(或稱擴(kuò)展單元,EU)可以安裝除CPU、發(fā)送IM,、IM463-2適配器外的所有S7-400模塊,,但是電源模塊不能與IM461-1(接收IM)一起使用。
中央機(jī)架和擴(kuò)展機(jī)架通過發(fā)送IM和接收IM相連,,CC可以插入最多6個(gè)發(fā)送IM,,每個(gè)EU有1個(gè)接收IM,每個(gè)發(fā)送IM有2個(gè)接口,,每個(gè)接口都可以連接一個(gè)擴(kuò)展線路,。
集中式擴(kuò)展方式適用于小型配置或一個(gè)控制柜中的系統(tǒng)。CC和EU的最大距離為1.5m(帶5V電源)或3m(不帶5V電源),。
分布式擴(kuò)展適用于分布范圍廣的場(chǎng)合,,CC與最后一個(gè)EU的最大距離為100m( S7EU)或600m(S5 EU)。CC最多插6塊發(fā)送IM,,最多有2個(gè)IM可以提供5V電源,。通過C總線(通信總線)的數(shù)據(jù)交換僅限于CC和6個(gè)EU之間。
用ET200分布式I/O可以進(jìn)行遠(yuǎn)程擴(kuò)展,,用于分布范圍很廣的系統(tǒng),。通過CPU中的PROFIBUS-DP接口,最多可以連接125個(gè)總線節(jié)點(diǎn),。使用光纜時(shí),,CC和最后一個(gè)節(jié)點(diǎn)的距離為23km。
電源模塊應(yīng)安裝在機(jī)架的最左邊(第1槽),,有冗余功能的電源模塊是一個(gè)例外,。中央機(jī)架只能插入最多6塊發(fā)送型的接口模塊,,每個(gè)模塊有兩個(gè)接口,,每個(gè)接口可以連接4個(gè)擴(kuò)展機(jī)架,,最多能連接21個(gè)擴(kuò)展機(jī)架。中央機(jī)架中同時(shí)傳送電源的發(fā)送接口模塊( IM460-1)不能超過兩塊,,IM460-1的每個(gè)接口只能帶一個(gè)擴(kuò)展機(jī)架。
擴(kuò)展機(jī)架中的接口模塊只能安裝在最右邊的槽(第18槽或第9槽),。通信處理器CP只能安裝在編號(hào)不大于6的擴(kuò)展機(jī)架中
6ES7131-4CD02-0AB0
ET200S 1 步進(jìn)模板輸出脈沖來控制步進(jìn)電機(jī) ,,輸出脈沖的數(shù)量決定步進(jìn)電機(jī)的運(yùn)動(dòng)距離,輸出脈沖的頻率決定步進(jìn)電機(jī)的速度,。
模板訂貨號(hào): 6ES7138-4DC00-0AB0
1.2 模板參數(shù)
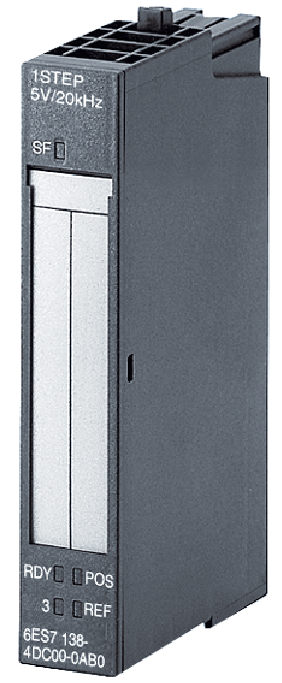
圖. 1: 步進(jìn)電機(jī)模板
- 1 通道,,可控制1個(gè)步進(jìn)電機(jī)
- 數(shù)字量輸入的參考點(diǎn)開關(guān)
- 外部停止或者外部脈沖使能數(shù)字輸入
- 脈沖和方向信號(hào)時(shí)RS422的差分輸出模式
- zui大輸出頻率: 204kHZ
- zui大脈沖數(shù): 1048575
- 4 LED 狀態(tài)指示燈
- 2 操作模式:尋找參考點(diǎn)和增量模式
2. 模板接線
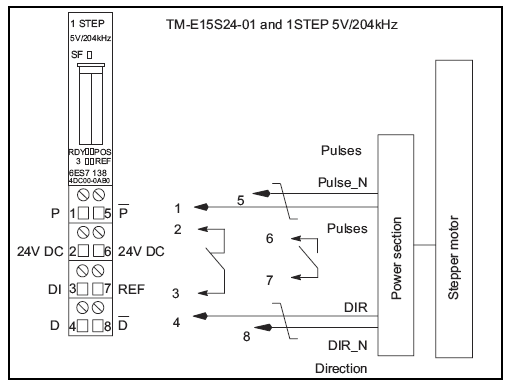
圖. 2: 步進(jìn)模板接線圖
- 端子1和5:脈沖差分信號(hào)
- 端子4和8:差分輸出的方向信號(hào)
- 端子2和3:外部停止或者外部脈沖使能數(shù)字量輸入ID。(功能選擇見 4.2 )
- 端子6和7:數(shù)字量輸入?yún)⒖键c(diǎn)開關(guān)
- 6ES7131-4BF00-0AA0
SIMATIC ET 200S, 開關(guān)量輸入, 8DI, DC 24V, ST
3. 硬件配置
步進(jìn)模板可以安裝在ET 200S接口模板或者 ET200S CPU后面,。
本文使用 IM151-7 CPU 為例,。

表 1: 軟件和硬件配置

圖. 3: ET200S 站的配置圖
4. 硬件和參數(shù)設(shè)置
4.1 硬件配置
1) 根據(jù)圖. 2 和圖. 3完成ET200S的接線
2) 打開STEP7,創(chuàng)建一個(gè)新項(xiàng)目,,并插入一個(gè)S7-300站
3) 從硬件目錄中選擇IM151-7 CPU直接拖拽到站配置窗口
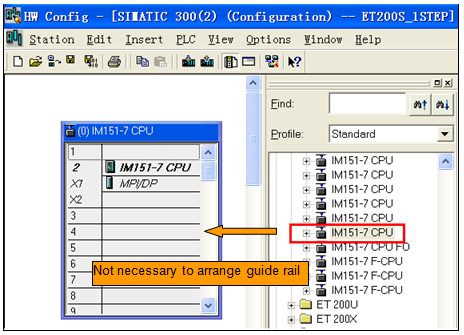
圖. 4: 插入IM151-7 CPU
4) 依次在4槽和5槽插入電源模板 PM-E DC24 和步進(jìn)模塊
圖. 5: 硬件配置
4.2 模板參數(shù)配置
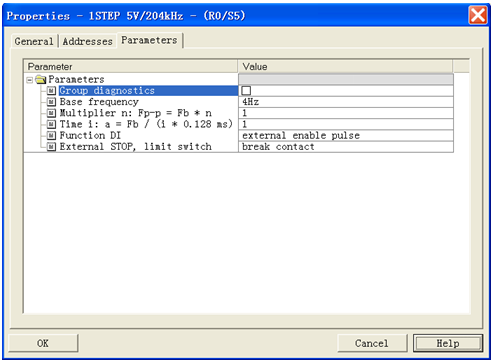
圖. 6: 步進(jìn)模塊參數(shù)接口
4.2.1 模板參數(shù)說明
1) 組診斷:組診斷
2) 基準(zhǔn)頻率:基準(zhǔn)頻率,,以Hz為單位,,標(biāo)識(shí)Fb
3) 增益 n: 增益系數(shù) n,值范圍 1-255. 此增益系數(shù)決定啟動(dòng)/停止頻率 Fss,,并且計(jì)算公式為: Fss=Fb×n
4) 時(shí)間 i: 時(shí)間系數(shù) i, 值范圍 1-255. 該時(shí)間系數(shù)以Hz/ms決定加速和減速,,計(jì)算公式為: a = Fb ×R / (i×0.128 ms)
5)功能 DI: 數(shù)字量輸入DI 功能可選,可以被組態(tài)為外部脈沖輸入或者外部停止信號(hào),,缺省是外部脈沖且已使能,。
6) 外部 Stop, 限位 Stop: 外部 stop, 信號(hào)類型停止開關(guān). 接觸器觸點(diǎn)是常閉信號(hào),以確保該接觸器信號(hào),,缺省是讀取常閉信號(hào),。
4.2.2 本文所例參數(shù)設(shè)置如下
本例參數(shù)配置見圖. 6.
1) 沒有激活組診斷
2) 基準(zhǔn)頻率 4Hz
3) 乘法系數(shù) 1, 啟動(dòng)/停止頻率 4Hz
4) 時(shí)間系數(shù) 1, 加速/ 減速 31.25 Hz/ms
5) 使能外部輸入脈沖
6) 外部輸入停止和限位信號(hào)為常閉類型
5. 編程
5.1 模板輸入/輸出地址分配
與其它ET200S功能塊類似,1STEP步進(jìn)模板也通過直接讀寫I/O地址來對(duì)模板進(jìn)行控制和訪問的,。
反饋信號(hào) (輸入), 占用 8 字節(jié). 如表 2 輸入地址分配所示,。
控制信號(hào) (輸出), 占用 8 字節(jié). 如表 3 輸出地址分配所示。
有關(guān)輸入和輸出變量分配的詳細(xì)信息請(qǐng)參閱 ET200S 位置控制和操作手冊(cè),。鏈接如下:
/cs/document/9260790?caller=view&lc=en-WW

表 2: 輸入地址分配
表 3: 輸出地址分配
5.2 項(xiàng)目例程
為了更好的實(shí)現(xiàn)按位,,字節(jié)或字對(duì)模板進(jìn)行讀寫,在梯形圖中使用MOVE指令接收輸入數(shù)據(jù)PIB272-PIB279 到MB10-MB17發(fā)送MB20-MB27到PQB272-PQB279,,對(duì)1STEP模板的讀寫訪問均通過MB地址來進(jìn)行,。
1STEP模板地址分配見圖. 5

圖. 7: 例程編程
6. 模式描述和舉例
6.1 Search-for-reference-point 模式
通過執(zhí)行search-for-reference-point 模式來同步軸, 即.在機(jī)械零位和電氣零位之間創(chuàng)建連接關(guān)系。
6.1.1 Search-for-reference-point 模式
Mode=1
參考點(diǎn)按照常開信號(hào)訪問
搜尋參考點(diǎn)輸出頻率 Fss 和 Fa,。
Fss 啟動(dòng)停止頻率,,見章節(jié) 4.2.1相關(guān)描述。
Fa 輸出頻率: Fa = Fb ×G × R
Fb: 基準(zhǔn)頻率. 在1STEP 模板參數(shù)中設(shè)置,。 見章節(jié) 4.2.1相關(guān)描述,。
增益 G: 增益系數(shù) G. 值范圍: 1-255, 參見模板輸出地址字節(jié): 0。
減少 R:減少系數(shù) R. 模板輸出地址字節(jié)4的第7位信號(hào),,參見表 3.模板輸出地址4.7=0, R=1. 模板輸出地址 4.7=0, R=0.1.
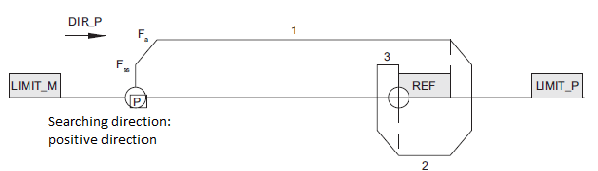
圖. 8: 搜尋參考點(diǎn)
6.1.2 search-for-reference-point模式例程
本例模式見圖. 8, viz. 搜尋 CW 方向.
- 通過變量表寫輸出控制變量:
圖. 9: 參考點(diǎn)模式控制變量
1) M24.0=1 search-for-reference-point 模式 = 1
2) M25.0=1, M25.1=1: 因?yàn)橹暗哪0鍏?shù)配置中的限位開關(guān)是常閉輸入模式,,在軟件限位信號(hào)觸發(fā)前為信號(hào)輸入?yún)⒁娬鹿?jié) 4.2.2.
3) M25.2=0: 沒有激活軟件脈沖使能信號(hào),因之前的模板參數(shù)配置中DI已經(jīng)作為外部脈沖信號(hào)使能,,內(nèi)部軟件脈沖使能信號(hào)在此時(shí)不會(huì)使用,,參見章節(jié) 4.2.2.
4) 置位M24.2, 然后復(fù)位M24.4 (下降沿有效), 啟動(dòng)search-for-reference-point模式. 輸出脈沖頻率為 Fa.
5) MB20=1, M24.7=0: 增益系數(shù) G = 1, 減少系數(shù) R = 1, 頻率 :
Fa = Fb ×G × R=4Hz×1×1=4Hz。
- 通過變量表讀輸入狀態(tài):

圖. 10: 參考點(diǎn)模式變量表
1) M15.2=1: 觸發(fā)外部脈沖使能信號(hào)
2) M15.0 = 1: 驅(qū)動(dòng)使能
3) 之后 search-for-reference point啟動(dòng), M14.0=1 位置被激活, M15.7=1 位置被執(zhí)行. 等待參考點(diǎn)開關(guān)信號(hào) M15.1.
4) M15.1=1: 參考點(diǎn)信號(hào)到達(dá), 尋找參考點(diǎn)已完成 M14.4=1,同步操作完成, M14.2=1,位置到達(dá), M15.3=1, 尋找參考點(diǎn)結(jié)束,。
6.2 增量模式
增量模式是 1STEP 的主要操作模式. 該操作模式可控制步進(jìn)電機(jī)移動(dòng)按照設(shè)定速度移動(dòng)到一個(gè)位置,。
6.2.1 增量模式描述
Mode=0
輸出脈沖的數(shù)量決定步進(jìn)電機(jī)的移動(dòng)距離,zui大值脈沖值為 1048575.
輸出脈沖頻率決定步進(jìn)電機(jī)速度,。
在增量模式下輸出頻率: Fss, Fa
方向信號(hào)作為啟動(dòng)信號(hào),。
注意: 步進(jìn)電機(jī)實(shí)際位移取決于脈沖數(shù)實(shí)際速度取決于脈沖頻率,這不是在1STEP模板中設(shè)置的。
6.2.2 增量模式例程
- 通過變量表寫輸出控制信號(hào):
圖. 11: 在增量模式下的控制變量
1) M24.0=0 增量模式 = 0
2) M25.0=1,、M25.1=1: 因之前的已經(jīng)配置中限位開關(guān)信號(hào)為常閉輸入模式,,在軟件限位信號(hào)觸發(fā)前為信號(hào)輸入?yún)⒁娬鹿?jié) 4.2.2。
3) MB20=1, M24.7=0:增益系數(shù) G = 1, 減少系數(shù) R = 1, 輸出頻率Fa
Fa = Fb ×G × R=4Hz×1×1=4Hz.
4) 脈沖輸出數(shù): 通過MB21-23的20 個(gè)位信號(hào)來存儲(chǔ)脈沖數(shù) ,zui大值為 0xFFFFF=1048575
MB21 輸出脈沖數(shù) (位 16 到位19)
MB22 輸出脈沖數(shù) (位 8 到位15)
MB23 輸出脈沖數(shù) (位 0 到位 7)
MB21的位 20 到位 23 沒有使用
本例中,,分配的值為 0 x 100,即. 256 個(gè)脈沖,。
5) 置位 M24.4, 之后復(fù)位 M24.4 (下降沿有效), 啟動(dòng)增量模式 觸發(fā)CW方向信號(hào)開始運(yùn)動(dòng)。 - 通過變量表讀輸入信號(hào):

圖. 12: 增量模式變量表
1)增量模式啟動(dòng)后,,M14.0=1位置任務(wù)被激活,,M15.7=1位置被執(zhí)行。
2) MD10 顯示剩余脈沖,,如圖. 12, 220 個(gè)脈沖尚未發(fā)出,。
3) MD10=0: 脈沖發(fā)送完成, 置位 M14.0 和M15.7, 位置到達(dá) M14.2=1 . 增量模式輸出完成
 您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)













