6ES7954-8LL02-0AA0
為了通過(guò)系統(tǒng)驗(yàn)收,,必須評(píng)估并記錄各個(gè)組件的正確性。為記錄組件特性,,必須創(chuàng)建安全摘
要。
在安全摘要中需包含以下特性:
● 檢查包括硬件配置在內(nèi)的安全程序是否正確(包含測(cè)試) (頁(yè) 313)
● 檢查安全摘要中的信息是否完整 (頁(yè) 314)
● 檢查安全程序中使用的系統(tǒng)庫(kù)元素是否符合 TÜV 證書報(bào)告的附錄 1,。 (頁(yè) 314)
● 安全程序中使用的設(shè)有專有技術(shù)保護(hù)的 F 塊符合其安全文檔,。 (頁(yè) 316)
● 檢查硬件配置的完整性和正確性 (頁(yè) 318)
● 通信組態(tài)的正確性和完整性 (頁(yè) 324)
● 在線和離線程序的一致性 (頁(yè) 325)
● 其他特性 (頁(yè) 326),如軟件版本,,標(biāo)準(zhǔn)用戶程序中的數(shù)據(jù)應(yīng)用等
完成驗(yàn)收后,,應(yīng)對(duì)所有相關(guān)文檔和項(xiàng)目數(shù)據(jù)進(jìn)行歸檔,將已通過(guò)驗(yàn)收的項(xiàng)目作為后續(xù)驗(yàn)收的參
考,。
安全摘要
安全摘要 (頁(yè) 296)是系統(tǒng)驗(yàn)收所需的項(xiàng)目文檔,。系統(tǒng)驗(yàn)收
檢查包括硬件配置在內(nèi)的安全程序是否正確(包含測(cè)試)
編程和操作手冊(cè), 10/2019, A5E33215622-03
檢查包括硬件配置在內(nèi)的安全程序是否正確(包含測(cè)試)
軟件的正確性不僅可以通過(guò)調(diào)試期間的測(cè)試和驗(yàn)證來(lái)確保,而且已經(jīng)要求在創(chuàng)建過(guò)程中遵守各
種各樣的措施,。另見(jiàn)“概述 (頁(yè) 22)”章節(jié)中關(guān)于該情況的警告 S062,。
驗(yàn)證/功能測(cè)試
在創(chuàng)建過(guò)程中,將測(cè)試 (頁(yè) 298)安全程序和相關(guān)的硬件配置,。在執(zhí)行系統(tǒng)驗(yàn)收之前,,必須對(duì)相
應(yīng)的安全功能規(guī)范進(jìn)行這些測(cè)試,然后對(duì)測(cè)試進(jìn)行記錄,。
要執(zhí)行安全程序的代碼檢查并記錄通過(guò)驗(yàn)收的程序代碼,,需要為打印輸出選擇“全部”(All) 選
項(xiàng),然后打印所有 F 塊的源代碼以將其作為安全摘要 (頁(yè) 296)的一部分,。
如果要在下載之后執(zhí)行一次功能測(cè)試,,必須執(zhí)行程序識(shí)別。更多信息,,請(qǐng)參見(jiàn)“下載項(xiàng)目數(shù)據(jù)
(頁(yè) 275)”,。
在終使用安全程序之前,必須確保該該安全程序的所有功能都符合“系統(tǒng)驗(yàn)收概述 (頁(yè) 312)”
章節(jié)中的所有步驟,。在使用組態(tài)控制(選項(xiàng)處理)時(shí),,必須通過(guò)執(zhí)行適當(dāng)?shù)墓δ軠y(cè)試,確保安
全程序?qū)λ锌赡艿恼具x項(xiàng)正確運(yùn)行,。應(yīng)將測(cè)試報(bào)告與安全摘要和驗(yàn)收文檔共同進(jìn)行歸檔,。
監(jiān)視時(shí)間 (頁(yè) 542)和延遲時(shí)間等時(shí)間只能通過(guò)功能測(cè)試 (頁(yè) 275)在一定的程度上得到驗(yàn)證。例
如,,應(yīng)選擇性檢查這些時(shí)間,,以使用安全摘要確定這些時(shí)間值是否正確,。
某些時(shí)間值在安全摘要中進(jìn)行了專門的詳細(xì)說(shuō)明,例如,,F 監(jiān)視時(shí)間(監(jiān)視 F-CPU 與 F-I/O
間的通信)和安全相關(guān) CPU 與 CPU 通信的監(jiān)視時(shí)間(輸入 TIMEOUT),。對(duì)于標(biāo)準(zhǔn)條件下
得到的監(jiān)視時(shí)間
S7-1500對(duì)V90 PN進(jìn)行位置控制的三種方法
S7-1500系列PLC可以通過(guò)PROFINET與V90 PN伺服驅(qū)動(dòng)器搭配進(jìn)行位置控制,實(shí)現(xiàn)的方法主要有以下三種:
? 方法一,、在PLC中組態(tài)位置軸工藝對(duì)象,,V90使用西門子報(bào)文105,通過(guò)MC_Power,、MC_MoveAbsolute等PLC Open標(biāo)準(zhǔn)程序塊進(jìn)行控制, 這種控制方式屬于*控制方式(位置控制在PLC中計(jì)算),。
? 方法二、PLC使用FB284(SINA_POS)功能塊,,V90使用西門子報(bào)文111,,實(shí)現(xiàn)相對(duì)定位、定位等位置控制功能,,這種控制方式屬于分布控制(位置控制在驅(qū)動(dòng)器中計(jì)算),。
? 方法三、PLC使用FB38002(Easy_SINA_Pos)功能塊,,V90使用西門子報(bào)文111,,此功能塊是FB284功能塊的簡(jiǎn)化版,功能比FB284少一些,,但是使用更加簡(jiǎn)便,。
V90 PN配置要點(diǎn)
? 對(duì)于方法一:設(shè)置控制模式為"速度控制(S)"
? 對(duì)于方法二或三:設(shè)置控制模式為"基本定位器控制(EPOS)",配置通信報(bào)文為西門子報(bào)文111
? V90在線后點(diǎn)擊"設(shè)置PROFINET->配置網(wǎng)絡(luò)",,設(shè)置V90的IP地址及設(shè)備名稱:注意:設(shè)置的設(shè)備名稱一定要與1500項(xiàng)目中配置的相同,。
參數(shù)保存后需重啟驅(qū)動(dòng)器才能生效。
方法一 使用標(biāo)準(zhǔn)報(bào)文105和工藝對(duì)象
V90 PN與PLC采用PROFINET IRT通信方式并使用西門子報(bào)文105,,項(xiàng)目步驟如下:
1. 創(chuàng)建項(xiàng)目后,,添加新設(shè)備S7-1500 PLC
2. 在網(wǎng)絡(luò)視圖中添加V90 PN設(shè)備(使用HSP)
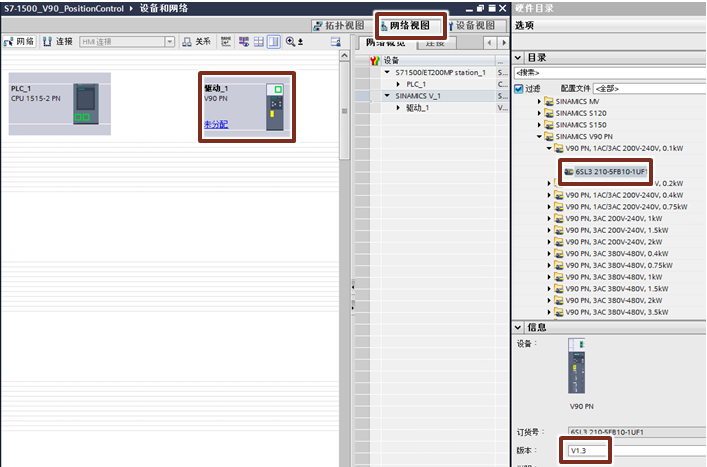
6ES7954-8LL02-0AA0
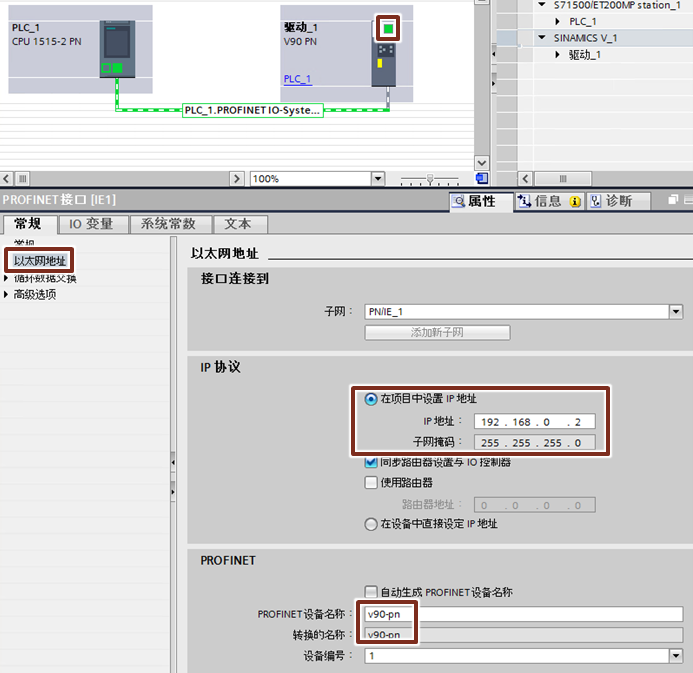
2. 建立V90 PN與PLC的網(wǎng)絡(luò)連接,并分別設(shè)置S7-1500及V90 PN的IP地址及設(shè)備名稱:

V90 的IP地址及設(shè)備名稱設(shè)置:
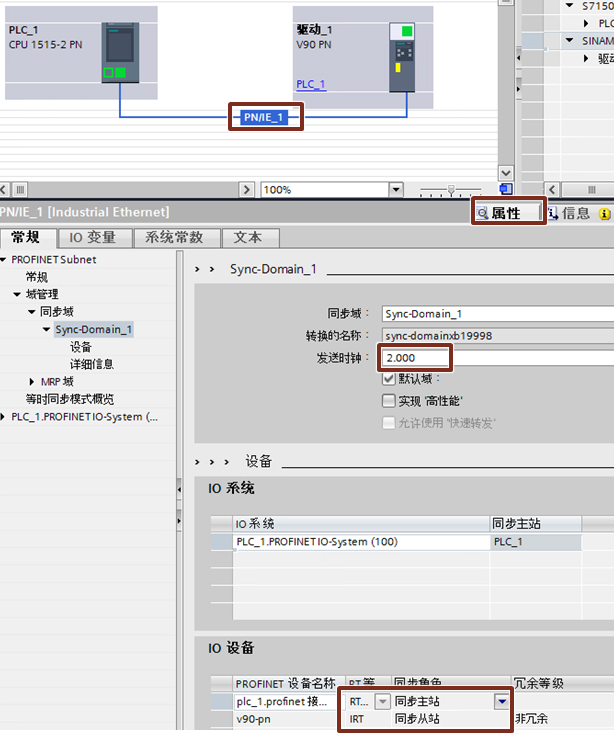
3. 在網(wǎng)絡(luò)視圖中配置PROFINET IRT通信,,需要注意當(dāng)前V90 PN的通信時(shí)間短為2ms:
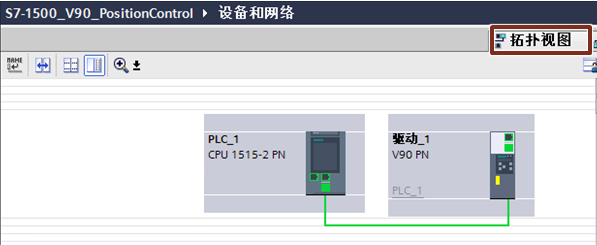
4. 在拓?fù)湟晥D中配置通信的接口連接,,本例為PLC的Port2連接V90 PN的Port1:
5. 插入一個(gè)位置軸

 您好, 歡迎來(lái)到化工儀器網(wǎng)
您好, 歡迎來(lái)到化工儀器網(wǎng)















