您好, 歡迎來到化工儀器網
您好, 歡迎來到化工儀器網










| 應用領域 | 化工,電子/電池 | 產地 | 德國 |
|---|---|---|---|
| 品牌 | 西門子 |
具有各種長度,包括切割至定長的型號,。 由于具有集成式 DIN 導軌,,可以卡裝廣泛的標準部件,,如附加端子、小型斷路器或小型繼電器,。具備高速(0.6~0.1μs)的指令運算速度,;用浮點數運算比較有效地實現(xiàn)了更為復雜的算術運算;和功能圖(FBD)編制,。與運行有關的功能范圍和數據類型均限于在此處設置,。編譯時使用特定的格式和參數,可以創(chuàng)建安全相關程序,。在單個CPU中
 |
| 參考價 | 面議 |
更新時間:2022-02-24 11:41:25瀏覽次數:434
聯(lián)系我們時請說明是化工儀器網上看到的信息,謝謝!
 |
 |
 |
 |
 |
6ES7954-8LE02-0AA0
S7-1500 安裝導軌上:
具有各種長度,,包括切割至定長的型號。 由于具有集成式 DIN 導軌,,可以卡裝廣泛的標準部件,,如附加端子、小型斷路器或小型繼電器,。具備高速(0.6~0.1μs)的指令運算速度,;用浮點數運算比較有效地實現(xiàn)了更為復雜的算術運算;和功能圖(FBD)編制,。與運行有關的功能范圍和數據類型均限于在此處設置。編譯時使用特定的格式和參數,,可以創(chuàng)建安全相關程序,。在單個CPU中,標準程序可以同時與故障安全程序一起運行(共存),,無任何限制,。并且位于故障安全信號模塊之內。
信號模塊采用差異分析方法和測試信號注入技術實現(xiàn)輸出和輸入信號的監(jiān)控,。
S7-1200 系列中如今新增了 S7-1200 SM 1231 RTD 模擬量信號模塊,。 該信號模塊的訂貨號如下所示。
信號模塊 | 訂貨號 |
|---|---|
SM 1231 AI 4 x RTD x 16 位 | 6ES7 231-5PD30-0XB0 |
SM 1231 RTD 模擬量信號模塊可測量連接到模塊輸入的電阻值,。 該值可以是溫度,,也可以是電阻。
SM 1231 RTD 模塊支持采用 2 線,、3 線和 4 線方式連接到傳感器電阻進行測量。
本產品信息包含有關該信號模塊的特性和技術規(guī)范的詳細信息,。有關 S7-1200 產品系列的更多信息,,請參考《SIMATIC S7-1200 可編程控制器系統(tǒng)手冊》。
如需要技術問題解答,、這些產品的培訓或訂購方面的幫助,,請與 Siemens 經銷商或銷售辦事處聯(lián)系。
模型 | SM 1231 AI 4 x RTD x 16 位 |
|---|---|
訂貨號 (MLFB) | 6ES7 231-5PD30-0XB0 |
尺寸 W x H x D (mm) | 45 x 100 x 75 |
重量 | 220 g |
功耗 | 1.5 W |
電流消耗(SM 總線) | 80 mA |
電流消耗 (24 VDC) 1 | 40 mA |
輸入數目 | 4 |
類型 | 模塊參考的 RTD |
范圍 | 請參見 RTD 傳感器選型表 |
滿量程范圍(數據字) | 請參見 RTD 傳感器選型表 |
過沖/下沖范圍 | 請參見 RTD 傳感器選型表 |
上溢/下溢(數據字) | 請參見 RTD 傳感器選型表 |
分辨率 |
|
大耐壓 | ± 35 V |
噪聲抑制 | 對于所選濾波器設置(10 Hz,、50 Hz,、60 Hz 和 400 Hz)為 85 dB |
阻抗 | ≥ 10 MΩ |
隔離 |
|
精度 | 請參見 RTD 傳感器選型表 |
可重復性 | ± 0.05% FS |
大傳感器功耗 | 0.5m W |
測量原理 | 積分型 |
模塊更新時間 | 請參見濾波器選型表 |
電纜長度(米) | 到傳感器長為 100 米 |
導線電阻 | 大 20 Ω,對于 10 Ω RTD,,大為 2.7 Ω |
共模抑制 | > 120dB |
診斷 | |
上溢/下溢報警2 3 | 支持 |
斷線報警 4 | 支持 |
24 VDC 低壓報警2 | 支持 |
下表給出了 1231 RTD 信號模塊支持的各種傳感器的測量范圍和精度,。
RTD 類型 | 阿爾法 | 歐姆 | 低于范圍 小值 | 額定范圍 | 額定范圍 | 超出范圍大值 | 25°C 時的額定范圍精度 | 0°C 到 55°C 時的額定范圍精度 |
|---|---|---|---|---|---|---|---|---|
Pt | 0.003850 | 10 | -243.0°C | -200.0°C | 850.0°C | 1000.0°C | ± 1.0°C | ± 2.0°C |
50 | ± 0.5°C | ± 1.0°C | ||||||
100 | ||||||||
200 | ||||||||
500 | ||||||||
1000 | ||||||||
Pt | 0.003902 | 100 | -243.0°C | -200.0°C | 850.0°C | 1000.0°C | ± 0.5°C | ± 1.0°C |
200 | ||||||||
500 | ||||||||
1000 | ||||||||
Pt | 0.003910 | 10 | -273.2°C | -240.0°C | 1100.0°C | 1295°C | ± 1.0°C | ± 2.0°C |
50 | ± 0.8°C | ± 1.6°C | ||||||
100 | ||||||||
500 | ||||||||
Ni | 0.006720 | 100 | -105.0°C | -60.0°C | 250.0°C | 295.0°C | ± 0.5°C | ± 1.6°C |
120 | ||||||||
200 | ||||||||
500 | ||||||||
1000 | ||||||||
LG-Ni | 0.005000 | 1000 | ||||||
Ni | 0.006170 | 100 | -105.0°C | -60.0°C | 180.0°C | 212.4°C | ± 0.5°C | ± 1.0°C |
Cu | 0.004270 | 10 | -240.0°C | -200.0°C | 280.0°C | 312.0°C | ± 1.0°C | ± 2.0°C |
Cu | 0.004260 | 10 | -60.0°C | -50.0°C | 200.0°C | 240.0°C | ± 1.0°C | ± 2.0°C |
50 | ± 0.6°C | ± 1.2°C | ||||||
100 | ||||||||
Cu | 0.004280 | 10 | -240.0°C | -200.0°C | 200.0°C | 240.0°C | ± 1.0°C | ± 2.0°C |
50 | ± 0.7°C | ± 1.4°C | ||||||
100 | ||||||||
電阻 | ||||||||
范圍 | 150 | n/a | 0 | 150 Ω | 176.383 Ω | ± 0.05% | ± 0.1% | |
300 | n/a | 0 | 300 Ω | 352.767 Ω | ± 0.05% | ± 0.1% | ||
600 | n/a | 0 | 600 Ω | 705.534 Ω | ± 0.05% | ± 0.1% | ||
提示 對于沒有連接傳感器的激活通道,模塊將報告 32767,。 如果還啟用了開路檢測,,模塊將使相應的紅色 LED 閃爍。 對于其它值較低的電阻使用 500 Ω 和 1000 Ω RTD 范圍時,,誤差可能增加到誤差的兩倍,。 若使用 4 線連接,對于 10 Ω RTD 范圍,,將得到精度,。 2 線模式的連接線電阻會導致傳感器讀數誤差,因此無法保證精度,。 |
噪聲抑制 頻率 | 積分 | 4/2 線 4 通道模塊 更新時間 | 3 線 4 通道模塊 更新時間 |
|---|---|---|---|
10 | 100 | 1.222 | 2.444 |
50 | 20 | 0.262 | 0.524 |
60 | 16.67 | 0.222 | 0.444 |
4001 | 10 | 0.142 | 0.284 |
提示 對 RTD 模塊上電后,模塊將對模數轉換器執(zhí)行內部校準。 在此期間,,模塊將報告每個通道的值為 32767,,直到相應通道出現(xiàn)有效值為止。 PLC 程序可能需要考慮這段初始化時間,。 |
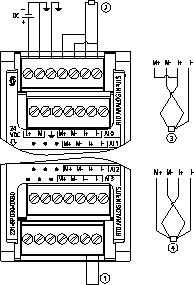
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
6ES7 231-5PD30-0XB0 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
① | 環(huán)接未使用的 RTD 輸入 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
② | 2 線制 RTD | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
③ | 3 線制 RTD | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
④ | 4 線制 RTD 6ES7954-8LE02-0AA0
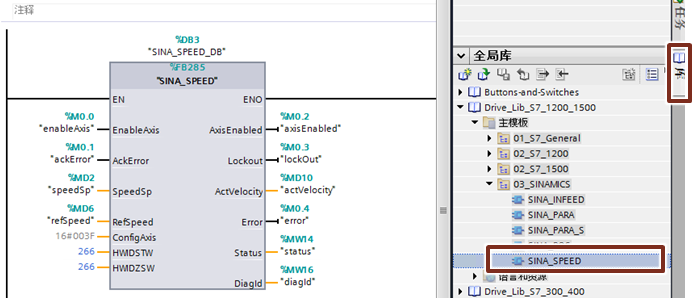
(MPI) 實現(xiàn)數據通信 在OB1中將DriveLib_S7_1200_1500中的SINA_Speed(FB285)功能塊拖拽到編程網絡中(此功能塊只能與標準報文1配合使用),,進行速度控制:
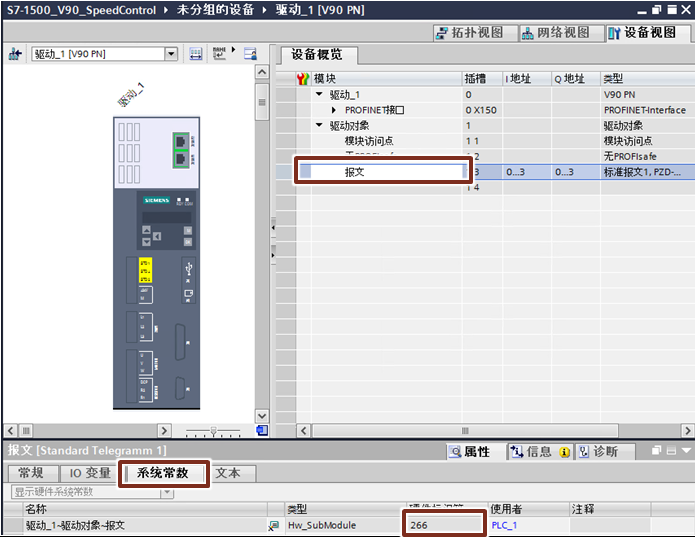
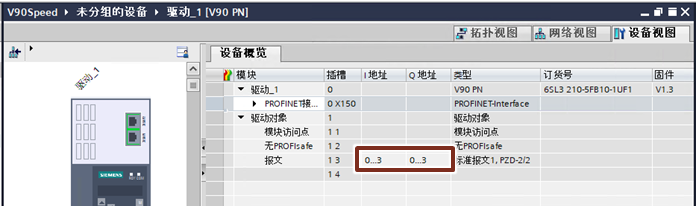
注意:功能塊管腳HWIDSTW及HWIDZSW的賦值請參看下圖:
4. SINA_SPEED功能塊輸入輸出參數說明 輸入參數:
ConfigAxis的各位說明:
輸出參數:
方法三 PLC通過IO地址直接控制V90 PN 此種控制方式無需的程序塊,,直接給定速度,。V90使用標準報文1,項目及網絡配置步驟與方法一相同,。通過對輸出的個控制字進行驅動器的起??刂啤⒌诙€控制字可以電機運行的速度,。
在OB1中調用MOVE命令,,發(fā)送對驅動的控制字及速度給定: 1. 通過個控制字進行驅動器的起停控制(16#047E->16#047F)
例如,,V90 PN的p2000=3000rpm,如果SpeedSetpoint設置為十進制的8192(即十六進制的16#2000),,則表示速度給定為1500r
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||