西門子6ES7590-1AB60-0AA0
PLC主要有整體式和模塊式兩種結(jié)構(gòu)型式,。 整體式PLC的每一個I/O點的平均價格比模塊式的便宜,且體積相對較小,一般用于系統(tǒng)工藝過程較為固定的小型控制系統(tǒng)中,;而模塊式PLC的功能擴展靈活方便,在I/O點數(shù)、輸入點數(shù)與輸出點數(shù)的比例,、I/O模塊的種類等方面選擇余地大,且維修方便,一般于較復雜的控制系統(tǒng)。
二,、安裝方式的選擇
PLC系統(tǒng)的安裝方式分為集中式,、遠程I/O式以及多臺PLC聯(lián)網(wǎng)的分布式。
集中式不需要設(shè)置驅(qū)動遠程I/O硬件,系統(tǒng)反應(yīng)快,、成本低,;遠程I/O式適用于大型系統(tǒng),系統(tǒng)的裝置分布范圍很廣,遠程I/O可以分散安裝在現(xiàn)場裝置附近,連線短,但需要增設(shè)驅(qū)動器和遠程I/O電源;多臺PLC聯(lián)網(wǎng)的分布式適用于多臺設(shè)備分別獨立控制,又要相互聯(lián)系的場合,可以選用小型PLC,但必須要附加通訊模塊,。
三,、相應(yīng)的功能要求
一般小型(低檔)PLC具有邏輯運算、定時,、計數(shù)等功能,對于只需要開關(guān)量控制的設(shè)備都可滿足,。
對于以開關(guān)量控制為主,帶少量模擬量控制的系統(tǒng),可選用能帶A/D和D/A轉(zhuǎn)換單元,具有加減算術(shù)運算、數(shù)據(jù)傳送功能的增強型低檔PLC,。對于控制較復雜,要求實現(xiàn)PID運算 ,、閉環(huán)控制、通信聯(lián)網(wǎng)等功能,可視控制規(guī)模大小及復雜程度,選用中檔或高擋PLC,。但是中,、高擋PLC價格較貴,一般用于大規(guī)模過程控制和集散控制系統(tǒng)等場合。
(1)參數(shù)設(shè)置錯誤,,變頻器內(nèi)部所設(shè)置的參數(shù)需要與所驅(qū)動的電機相匹配,,如變頻器參數(shù)設(shè)置不當或是設(shè)置錯誤將會導致變頻器無法正常啟動。但是在無線電頻率資源中,,由于無線電頻率資源有限,,在不同區(qū)域被反復復用的現(xiàn)象很常見,這又造成了相鄰區(qū)域頻率共用現(xiàn)象,,于是形成同頻干擾
(2)互調(diào)干擾指不同頻率的信號在非線性電路中產(chǎn)生與有用信號頻率*或相鄰的無用信號,。 嚴格按照相關(guān)規(guī)定運營,后,,電信運營商要做好核查,,保證網(wǎng)內(nèi)的無線電發(fā)射設(shè)備參數(shù)正常,杜絕大功率無繩電話的使用,發(fā)現(xiàn)問題及時整改,,3.3完善無線電監(jiān)測和測向網(wǎng)絡(luò)干擾源的定位查找是以完善的監(jiān)測和測向網(wǎng)絡(luò)為支撐的,。
進而導致整個系統(tǒng)的電壓紊亂,在這種情況下,,電動機,,大功率開關(guān)等設(shè)施都處于極不穩(wěn)定的情況,而相對的電網(wǎng)產(chǎn)生的干擾信號卻極其強烈,,此時電源會發(fā)生突然短路的情況,,同時伴隨著電壓的不穩(wěn)定進而使整個系統(tǒng)都處于無法正常運轉(zhuǎn)的情況。
總結(jié)了在公路施工中機電一體化系統(tǒng)存在的干擾源,,,,施工過程中會存在供電干擾,供電干擾在公路施工機電一體化當中所占的概率,,其容易出現(xiàn)此種干擾現(xiàn)象,,產(chǎn)生這種干擾的原因主要是大功率設(shè)備在機電一體化系統(tǒng)當中的普遍使用使電網(wǎng)受到不同程度的影響。
PLC控制系統(tǒng)的各類信號傳輸線除了傳輸各種有效的信息外,還傳輸著外部的干擾信號,。主要是信號線受空間電磁輻射感應(yīng)的干擾,這是很嚴重的,。由信號引入干擾會引起I/O信號異常,大大降低測量精度,嚴重時將引起元器件損傷。隔離性能差的系統(tǒng),將導致信號間互相干擾,引起共地系統(tǒng)總線回流,造成邏輯數(shù)據(jù)變化,、誤動和死機,。實際生產(chǎn)過程中,PLC控制系統(tǒng)因信號引入干擾造成I/O點損壞的情況相當嚴重,由此引起系統(tǒng)故障。
輸入通道中的檢測信號一般較弱,、傳輸距離較長,使現(xiàn)場干擾和電路結(jié)構(gòu)模數(shù)混雜等因素很容易進入通道,。保護方法可在輸入端外加一級光電耦合器,一旦有高壓電壓等侵入回路時,使其擊穿保護級光耦,可保護回路。
造成此類故障的原因主要是由于西門子變頻器在使用的過程中出現(xiàn)多次過載或是西門子變頻器長時間處于電壓波動較大的情況,,模擬地線,,噪聲地線以及儀器機殼的屏蔽地線等,這些地線應(yīng)該分開布置,并在一點上與電源地相連。
與手段相比,,管理手段是一種較為經(jīng)濟和有效的防范措施,,并且是一種根本的解決方案,首先,,相關(guān)部門要制定完善的法律法規(guī),,加強對無線電頻率的保護,其次,,要求相關(guān)設(shè)臺單位加強自我管理,,加強法規(guī)建設(shè)和宣傳教育。
PLC控制系統(tǒng)的地線包括系統(tǒng)地,,屏蔽地,,交流地和保護地等,由于各個接地點電位分布不均,不同接地點間存在電位差而引起地環(huán)路電流,影響系統(tǒng)正常工作,,若系統(tǒng)地與其它接地處理混亂,所產(chǎn)生的環(huán)路電流就可能在地線上產(chǎn)生電位分布,影響邏輯電路和模擬電路的正常工作,嚴重的造成系統(tǒng)癱瘓。
電磁波和電磁輻射等等可能影響到系統(tǒng)正常運轉(zhuǎn)的圍在于其周圍的無形的[場",,由于這些[場"無形的存在于系統(tǒng)的周圍,,因此很容易通過電源,傳輸線路等侵入系統(tǒng),,進而影響系統(tǒng)的正常運轉(zhuǎn),,三,公路施工中機電一體化的抗干擾措施機電一體化系統(tǒng)在公路施工中的運用如果要達到更佳的效果,。
3無線電波特性和頻譜管理3.1完善無線電干擾查找流程解決無線電干擾問題的前提是找出干擾源,,因此要對無線電干擾源進行查找,無線電干擾查找步驟可簡單概括為:一聽,,二看,,三算,四跟,,五測,聽是指,,即通過用耳朵判斷某些特定頻段的干擾是否存在,。
西門子6ES7590-1AB60-0AA0
- 用于故障安全SIMATIC S7系統(tǒng)的數(shù)字量輸入
- 對于連接:
- 開關(guān)和 2 線制接近開關(guān)
- NAMUR傳感器和機械觸點以及危險區(qū)域信號
- 具有安全集成功能,用于安全運行
- 用于故障安全操作
- 集中式:帶有 S7-31xF-2 DP
- ET200M 分布式:帶 SIMATIC IM 151-7 F-CPU,、S7-31xF-2 DP,、S7-416F-2 和 S7-400F/FH
- 在標準操作中,可以像 S7-300 模塊一樣使用

Area of application
故障安全型數(shù)字量輸入模塊適用于連接:
- 開關(guān)以及2線制接近開關(guān)(BERO)
- NAMUR傳感器和機械觸點以及危險區(qū)域信號
該模塊作為集中式與SIMATIC S7-31xF-2DP一起使用,,并可在ET200M分布式I/O站中與 SIMATIC IM 151-7 F-CPU,,S7-31xF-2 DP、S7-416F-2 和 S7-400F/FH 一起使用,。它們也可以使用在非安全的標準模式下,,并可像標準S7-300模塊進行響應(yīng)。
Design
故障安全型數(shù)字量輸入模塊具有以下機械特點:
- 設(shè)計緊湊:
堅固的塑料機殼里包括:- 綠色LED指示輸入信號狀態(tài)
- 綠色 LED 指示安全模式
- 紅色 LED 顯示組出錯
- 通過前蓋保護的前連接器的插槽
- 前蓋上的標簽區(qū)
- 安裝方便:
安裝方法與ET 200M的其它 I/O 模塊相同 - 通過前連接器進行用戶友好接線
注意:
在危險區(qū)域運行 6ES7 326-1RF00-0AB0 故障安全數(shù)字量輸入模塊時需要電纜 6ES7 393-4AA10-0AA0,。
Functions
故障安全型數(shù)字量輸入模塊把從過程發(fā)送來的外部數(shù)字信號電平轉(zhuǎn)換成SIMATIC S7 CPU內(nèi)部信號電平,。
安全功能所需的故障安全操作集成在模塊中。
S7-200與V20的USS通訊
1,、本例程的系統(tǒng)配置:
(1)安裝Step7 Micro/Win V4.0 SP6軟件和USS協(xié)議V2.3,,軟件下載地址:
(2)PC/PPI電纜、S7-200,、電源模塊,、通信電纜。
(3)V20驅(qū)動裝置和一臺PC機,。
2,、在使用MicroWin software 創(chuàng)建項目之前,,確認USS庫文件已經(jīng)安裝:
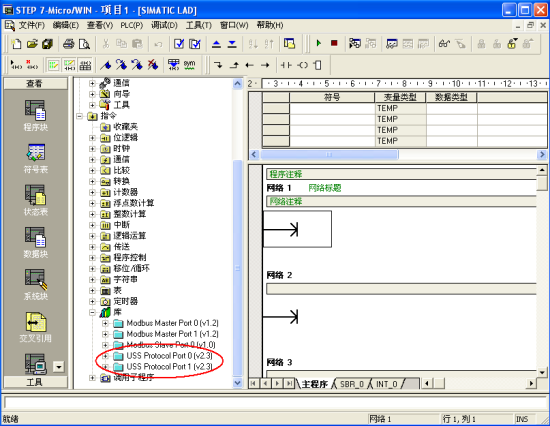
3、創(chuàng)建一個例程:
3.1 設(shè)置通訊接口
本例程使用PC/PPI電纜,。

3.2 建立PC和PLC之間的連接
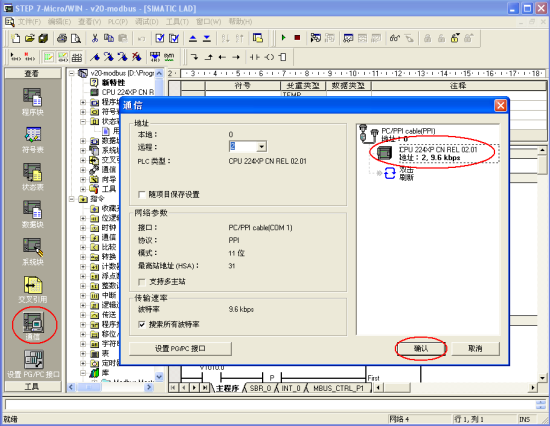
“雙擊刷新”搜索到PLC后,,點擊”確認”。
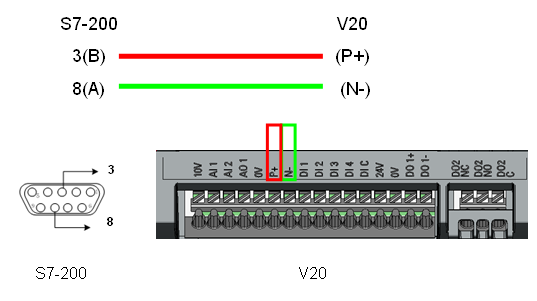
3.3 用電纜將S7-200 Port 0端口與V20的RS485接口相連(注意端口連接規(guī)則:V20的
P+對3,、N-對8),,如下圖所示:
3.4 變頻器參數(shù)設(shè)置:
V20 可以通過選擇連接宏Cn010實現(xiàn)USS控制,也可以通過直接更改變頻器參數(shù)的方法來實現(xiàn),。參數(shù)設(shè)置如下表所示:
表一:
| 參數(shù) | 描述 | Cn010默認值 | 實際設(shè)置 | 備注 |
| P0700[0] | 選擇命令源 | 5 | 5 | RS485為命令源 |
| P1000[0] | 選擇頻率 | 5 | 5 | RS485為速度設(shè)定值 |
| P2023 | RS485協(xié)議選擇 | 1 | 1 | USS協(xié)議 |
| P2010[0] | USS/MODBUS波特率 | 8 | 6 | 波特率為9600bps |
| P2011[0] | USS地址 | 1 | 3 | 變頻器的USS地址 |
| P2012[0] | USS PZD長度 | 2 | 2 | PZD部分的字數(shù) |
| P2013[0] | USS PKW長度 | 127 | 127 | PKW部分字數(shù)可變 |
| P2014[0] | USS/MODBUS報文間斷時間 | 500 | 0 | 接收數(shù)據(jù)時間 |
3.5 使用USS協(xié)議的初始化模塊初始化S7-200的PORT0端口:
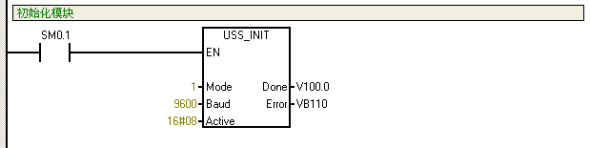
EN使能:每次改變通訊狀態(tài)都應(yīng)該執(zhí)行一次初始化指令,。所以EN信號應(yīng)該通過邊沿檢測元件脈沖激活。
Mode:用這個USS輸入值選擇通訊協(xié)議,。
1:為端口0USS協(xié)議,,并啟用該協(xié)議。
0:為端口0PPI協(xié)議,,并禁止USS協(xié)議,。
Baud: 波特率:9600,19200…115200,。
Active:激活驅(qū)動地址,。
Done:當USS_INIT 指令執(zhí)行完成后,Done=1,。
Error:指令執(zhí)行的結(jié)果,,如果有錯誤,顯示錯誤代碼,。
Active:激活驅(qū)動地址舉例:

3.6 使用USS——CTRL模塊來控制USS地址為3的變頻器,,為了運行變頻器需要按照表一設(shè)置參數(shù):

狀態(tài)表:

功能塊定義:
EN:通常情況總是激活。
RUN:指示驅(qū)動為啟用(1),,或禁止(0),。
OFF2:允許V20自由停車。
OFF3:允許V20快速停止,。
F _ACK:V2*復位,。
DIR:V20轉(zhuǎn)動方向(0:逆時針;1:順時針),。
Drive:V20地址 0-31,。
Speed:速度給定值,以全速的百分比給出 (-200.0~~200.0%,,負值時,,V20反向)。
Resp_R:輪詢V20,,掃描時=1,,并更新下面值,。
Error:錯誤字節(jié),參見表:USS指令執(zhí)行錯誤,。
Status:V20返回狀態(tài)值,。
Speed:V20速度,(-200.0~~200.0%),。
Run_EN:V20運行狀態(tài)(1:運行,;0:停止)。
D_DIR:V20轉(zhuǎn)動方向(0:逆時針,;1:順時針)
Inhibit:V20禁止位狀態(tài),。 (0:啟用;1:禁止),。要清除禁止位,,必須將Fault清零,
RUN,,OFF2,, OFF3輸入也要清零。
Fault:指示故障狀態(tài),。根據(jù)V2*表確認故障,。故障排除后,置位F _ACK使Fault
清零,。
表二:Error 信息
| Error代碼 | 說明 |
| 0 | 沒有錯誤 |
| 1 | 驅(qū)動未響應(yīng) |
| 2 | 檢測到驅(qū)動響應(yīng)中存在校驗和錯誤 |
| 3 | 檢測到驅(qū)動響應(yīng)中存在奇偶校驗錯誤 |
| 4 | 由于用戶程序干擾導致出錯 |
| 5 | 嘗試執(zhí)行了無效命令 |
| 6 | 提供的驅(qū)動地址無效 |
| 7 | 該通訊接口不能實現(xiàn)USS協(xié)議 |
| 8 | 該通訊接口正在忙于處理指令 |
| 9 | 驅(qū)動速度輸入溢出 |
| 10 | 驅(qū)動響應(yīng)的長度不正確 |
| 11 | 驅(qū)動響應(yīng)的首字符不正確 |
| 12 | 驅(qū)動響應(yīng)的長度字符不正確 |
| 13 | 驅(qū)動響應(yīng)錯誤 |
| 14 | 給出的DB_PTR地址不正確 |
| 15 | 給出的參數(shù)號不正確 |
| 16 | 選擇了無效的協(xié)議 |
| 17 | 啟用USS:不允許更改 |
| 18 | 了無效的波特率 |
| 19 | 無通訊:驅(qū)動未激活 |
| 20 | 驅(qū)動響應(yīng)中的參數(shù)或值不正確 |
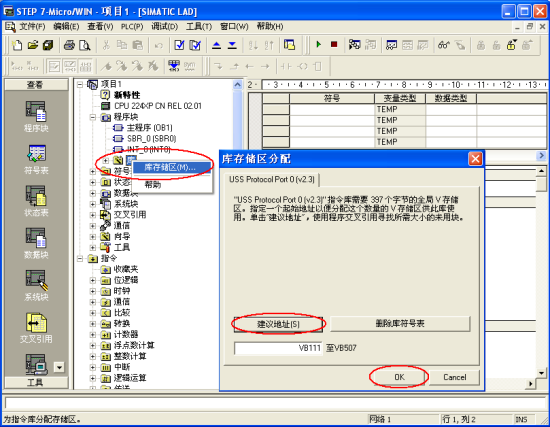
3.7 庫存儲區(qū)分配:在編譯程序之前,選擇 “程序塊” ->“ 庫” 右鍵,,選擇“庫存儲區(qū)”,。在點擊 “建議地址” 選擇V存儲區(qū)的地址后點擊 “OK”退出。
3.8 讀寫U16類型參數(shù):
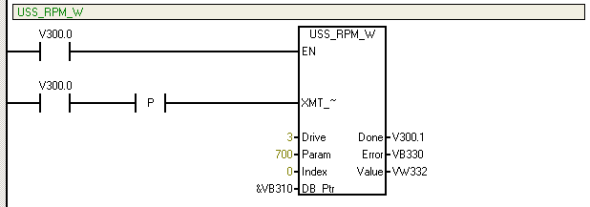
3.81舉例:使用USS_RPM_W讀取參數(shù)P0700的值,;
狀態(tài)表:

注意:
(1)讀參數(shù)P0700,,其數(shù)據(jù)類型為U16無符號整數(shù)。
(2)只要給V300.0一個上升沿,,就完成一次P0700參數(shù)的讀操作,。
(3)讀入的參數(shù)被放在VW332里。
(4)需要注意的是Index為0時代表讀Pxxx.0參數(shù)組
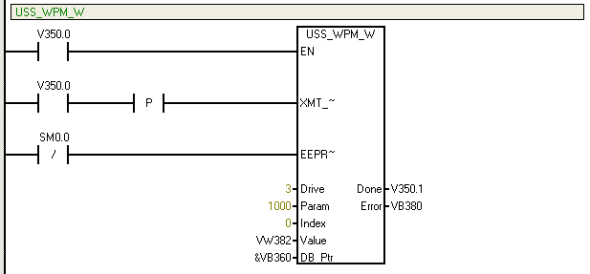
3.8.2 舉例:使用USS_RPM_W設(shè)置參數(shù)P1000,。
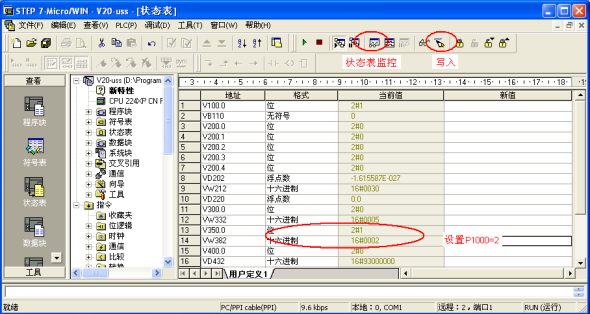
狀態(tài)表:
注意:
(1)寫參數(shù)P1000,,其數(shù)據(jù)類型為U16無符號整數(shù)。
(2)只要給V350.0一個上升沿,,就完成一次P1000參數(shù)的寫操作,。
(3)EEPR~的邏輯為0時,寫入的值只保存到RAM中,,為1時,,寫入得值保存到EEPROM,。
(4)EEPROM中寫數(shù)據(jù)是有次數(shù)限制的,V20*多不超過50000次,。
3.9 讀寫U32類型參數(shù):
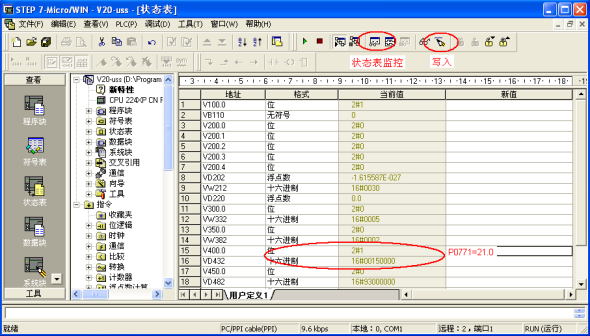
3.9.1舉例:使用USS_RPM_D讀取參數(shù)P0771.In000的值,;
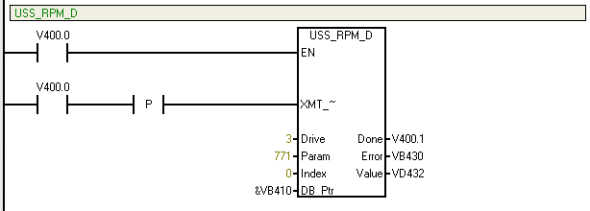
狀態(tài)表:
注意:
(1)讀參數(shù)P771,其數(shù)據(jù)類型為U32無符號整數(shù),。
(2)只要給V400.0一個上升沿,,就完成一次P771參數(shù)的讀操作。
(3)讀入的參數(shù)被放在VD432里,。16#00150000=21.0,。
(4)需要注意的是Index為0時代表讀Pxxx.0參數(shù)組。
3.9.2 舉例:使用USS_WPM_D設(shè)置參數(shù)P0771.In000
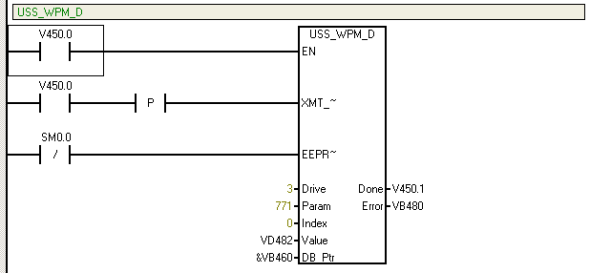
狀態(tài)表:

注意:
(1)寫參數(shù)P771,,其數(shù)據(jù)類型為U32無符號整數(shù),。
(2)只要給V450.0一個上升沿,就完成一次P771參數(shù)的寫操作,。
(3)EEPR~的邏輯為0時,,寫入的值只保存到RAM中,為1時,,寫入得值保存到EEPROM,。
(4)EEPROM中寫數(shù)據(jù)是有次數(shù)限制的,V20*多不超過50000次,。
3.10讀寫Float類型參數(shù):
3.10.1舉例:使用USS_RPM_R讀取參數(shù)P0305.In001的值,;
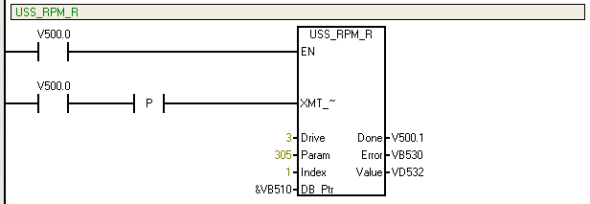
狀態(tài)表:

注意:
(1)讀參數(shù)P0305.In001,其數(shù)據(jù)類型為浮點數(shù),。
(2)只要給V550.0一個上升沿,,就完成一次P0305.In001參數(shù)的讀操作。
(3)讀入的參數(shù)被放在VD532里,。
(4)需要注意的是Index為1時代表讀Pxxx.1參數(shù)組,。
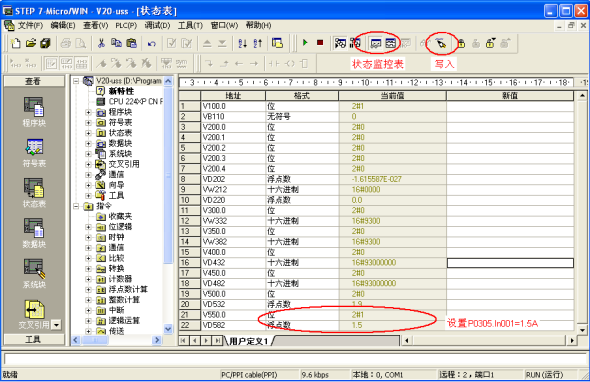
3.10.2舉例:使用USS_WPM_R設(shè)置參數(shù)P0305.In001=1.5A
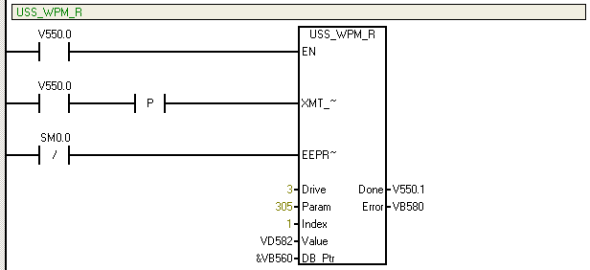
狀態(tài)表:
注意:
(1)寫參數(shù)P0305.In001,其數(shù)據(jù)類型為浮點數(shù),。P0305更改條件:P0010=1快速調(diào)試,。
(2)只要給V550.0一個上升沿,就完成一次參數(shù)P0305.In001的寫操作,。
(3)EEPR~的邏輯為0時,,寫入的值只保存到RAM中,為1時,,寫入得值保存到EEPROM,。
(4)EEPROM中寫數(shù)據(jù)是有次數(shù)限制的,V20*多不超過50000次
 您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)















