 您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)










| 產(chǎn)地類別 | 進口 | 應用領域 | 化工,電子/電池 |
|---|---|---|---|
| 產(chǎn)地 | 德國 | 品牌 | 西門子 |
SIMATIC STEP 7 Professional V12 工程組態(tài)軟件
新的 SIMATIC S7-1500控制器系列只能在 Totally Integrated Automation Portal 中使用 STEP 7 Professional V12 及更高版本進行組態(tài)。SIMATIC STEP 7 Professional V12
 |
| 參考價 | 面議 |
更新時間:2022-02-24 11:41:25瀏覽次數(shù):419
聯(lián)系我們時請說明是化工儀器網(wǎng)上看到的信息,,謝謝!
 |
 |
 |
 |
 |
西門子6ES7590-1AE80-0AA0
性能 SIMATIC S7-1500 控制器的用戶利益和亮點
集成技術
集成了安全功能
設計與操作
集成系統(tǒng)診斷功能
性能
SIMATIC S7-1500控制器提供了更高性能,位指令的處理時間低至 1ns,,浮點運算的指令處理時間低至 10ns (取決于 CPU 類型,不在次上市發(fā)布范圍內(nèi)),。背板總線的速度是 S7-400 PLC 的 40 倍,;由于代碼生成得到優(yōu)化,CPU 的響應速度與現(xiàn)有控制器的 CPU 相比更快,。
每個 CPU 都配有一個 PROFINET IO (2 端換機)標準接口,。CPU 1516-3PN/DP 另外還具有一個集成 PROFINET 基本接口,例如,,可用于網(wǎng)絡隔離,。通過集成的 PROFIBUS 的接口,可以將 PROFIBUS 節(jié)點連接至 CPU 1516-3 PN/DP,。
通過一個 PROFIBUS CM,,可方便地對不帶 PROFIBUS 接口的 CPU 進行擴展
集成技術
通過 PROFINET、PROFIBU 或模擬量接口,,可靈活地將變頻器連接至 S7-1500 CPU,。運動控制序列的編程可借助于 PLCopen 運動控制軟件塊方便地完成。用戶可通過易于使用的診斷和調(diào)試工具對變頻器進行調(diào)試。自動發(fā)送到工程組態(tài)系統(tǒng)和人機界面的報警消息可以簡化用戶調(diào)試,,節(jié)省調(diào)試時間,,降低工作量。
集成了安全功能
與 STEP 7 結(jié)合使用時,,每個 CPU 都會提供基于密碼的知識保護,,可防止未經(jīng)授權(quán)而讀出并更改程序塊的內(nèi)容。
復制保護加強了安全防護,,防止未經(jīng)授權(quán)而復制程序塊,。可以將具體程序塊鏈接至存儲卡的序列號,,以便只有在將組態(tài)的存儲卡插到 CPU 中之后,,才會執(zhí)行該程序塊。
并且,,控制器具有四個不同的安全訪問級別,,以便向不同用戶組分配不同的訪問權(quán)限。
由于操作保護得到改進,,因此,,控制器可以檢測到數(shù)據(jù)更改或未經(jīng)授權(quán)的組態(tài)數(shù)據(jù)傳輸。
設計與操作
每個 SIMATIC S7-1500 CPU 都配有一個顯示屏,。通過此顯示屏,,用戶可方便地分析中央模塊以及分布式模塊的狀態(tài),或者無需編程器而設置和更改 IP 地址,。系統(tǒng)診斷信息和用戶診斷以普通文本形式顯示在顯示屏上,,從而有助于快速而高效地響應到來的出錯消息。
顯示屏上可用多種語言顯示菜單文本和信號文本,。該系統(tǒng)還允許在運行期間卸下和重新安裝模塊,。
在 S7-1500 控制器的一個集中組態(tài)中,可以將多 32 個模塊(CPU + 31 個模塊)插到一層上,,而無需使用接口模塊,。系統(tǒng)的主干是自動建立式背板總線。每個 I/O 模塊都配有所需的 U 型連接器,。一種有源背板總線正在準備中,,供需要“在運行期間無響應地拆卸和重新安裝部件”功能的客戶使用。
集成系統(tǒng)診斷功能
集成系統(tǒng)診斷功能已針對 S7-1500系列的 CPU 預先激活,;系統(tǒng)診斷信息以普通文本形式統(tǒng)一顯示在顯示屏、TIA Portal,、HMI 和 Web 服務器上,,甚至可顯示來自變頻器的消息;現(xiàn)在,在 CPU 停止運行期間也將提供這種診斷,。若配置了新的硬件組件,,則自動對診斷信息進行更新。
SIMATIC STEP 7 Professional V12 工程組態(tài)軟件
新的 SIMATIC S7-1500控制器系列只能在 Totally Integrated Automation Portal 中使用 STEP 7 Professional V12 及更高版本進行組態(tài),。SIMATIC STEP 7 Professional V12 是用于對 SIMATIC S7-1500 進行直觀處理的工程組態(tài)系統(tǒng),,除了對 S7-1500進行組態(tài)外,還可對 S7-300/400 和 S7-1200 控制器進行組態(tài),。
兼容性
SIMATIC STEP 7 Professional V12 中集成的移植工具提供了以下支持:
從 S7-300/S7-400 切換到 S7-1500 控制器并自動轉(zhuǎn)換程序代碼,。將會記錄無法自動轉(zhuǎn)換的程序代碼部分并可以手動進行修改。STEP 7 V11 項目可繼續(xù)在兼容模式下用于 STEP 7 V12,。并且,,可通過粘貼/復制功能將 S7-1200 程序轉(zhuǎn)換到 S7-1500。
SIMATIC 存儲卡(用來運行 CPU)
SIMATIC S7-1500 CPU 采用了一個 SIMATIC 存儲卡,。該存儲卡用作插入式裝載存儲器,,或用于執(zhí)行固件更新。
此 SIMATIC 存儲卡也可用于存儲 STEP 7 項目,,包括注釋和符號,、其它文檔或 csv 文件(用于配方和歸檔)。使用系統(tǒng)函數(shù)(SFC)和用戶程序,,可以創(chuàng)建數(shù)據(jù)塊,,并將數(shù)據(jù)存儲在 SIMATIC 存儲卡上。
 FB284怎樣實現(xiàn)程序塊運行控制,?
FB284怎樣實現(xiàn)程序塊運行控制,?
此程序塊運行模式通過驅(qū)動功能"Traversing blocks"來實現(xiàn),,它允許自動創(chuàng)建程序塊、運行至檔塊,、設置及復位輸出,。
要求:
? 運行模式選擇ModePos=6
? ConfigEpos=16#00000003
? 軸靜止
? 軸必須已回零或值編碼器已校正
步驟:
? 工作模式、目標位置及動態(tài)響應已在V90 PN驅(qū)動的運行塊參數(shù)中進行設置,,輸入?yún)?shù) OverV,、OverAcc、OverDec 速度,、加減速度的倍率,,通常采取默認設置即可(*)。
? 運行條件"CancelTransing" 及 "IntermediateStop"必須設置為 "1",,Jog1 及 Jog2 必須設置為 "0"
? 程序塊號在輸入?yún)?shù) "Position" 中設置,,取值應為 0~ 16
? 運動的方向由與工作模式及程序塊中的設置決定,與Positive 及Negative參數(shù)無關,,必須將它們設置為"0",。
? 驅(qū)動的運行命令AxisEnable=1
選擇程序塊號后通過Execute Mode的上升沿來觸發(fā)運行。
FB284怎樣實現(xiàn)點動"Jog"控制?
點動運行模式通過驅(qū)動的"Jog"功能來實現(xiàn),。
要求:
? 運行模式選擇ModePos=7
? ConfigEpos=16#00000003
? 軸靜止
? 軸不必回零或值編碼器校正
步驟:
? 點動速度在V90 PN中設置,,速度的OverV參數(shù)對于點動速度設定值進行倍率縮放,建議使用默認值*
? 運行條件"CancelTransing" 及 "IntermediateStop"與點動運行模式無關,,默認設置為 "1"
? 驅(qū)動的運行命令 AxisEnable=1
? 給出jog1或jog2信號
注意:
? Jog1 及Jog2 用于控制EPOS的點動運行,,運動方向由V90 PN驅(qū)動中設置的點動速度來決定,默認設置為Jog1 = 負向點動速度,,Jog2 = 正向點動速度 ,,與Positive 及Negative參數(shù)無關,默認設置為"0",。
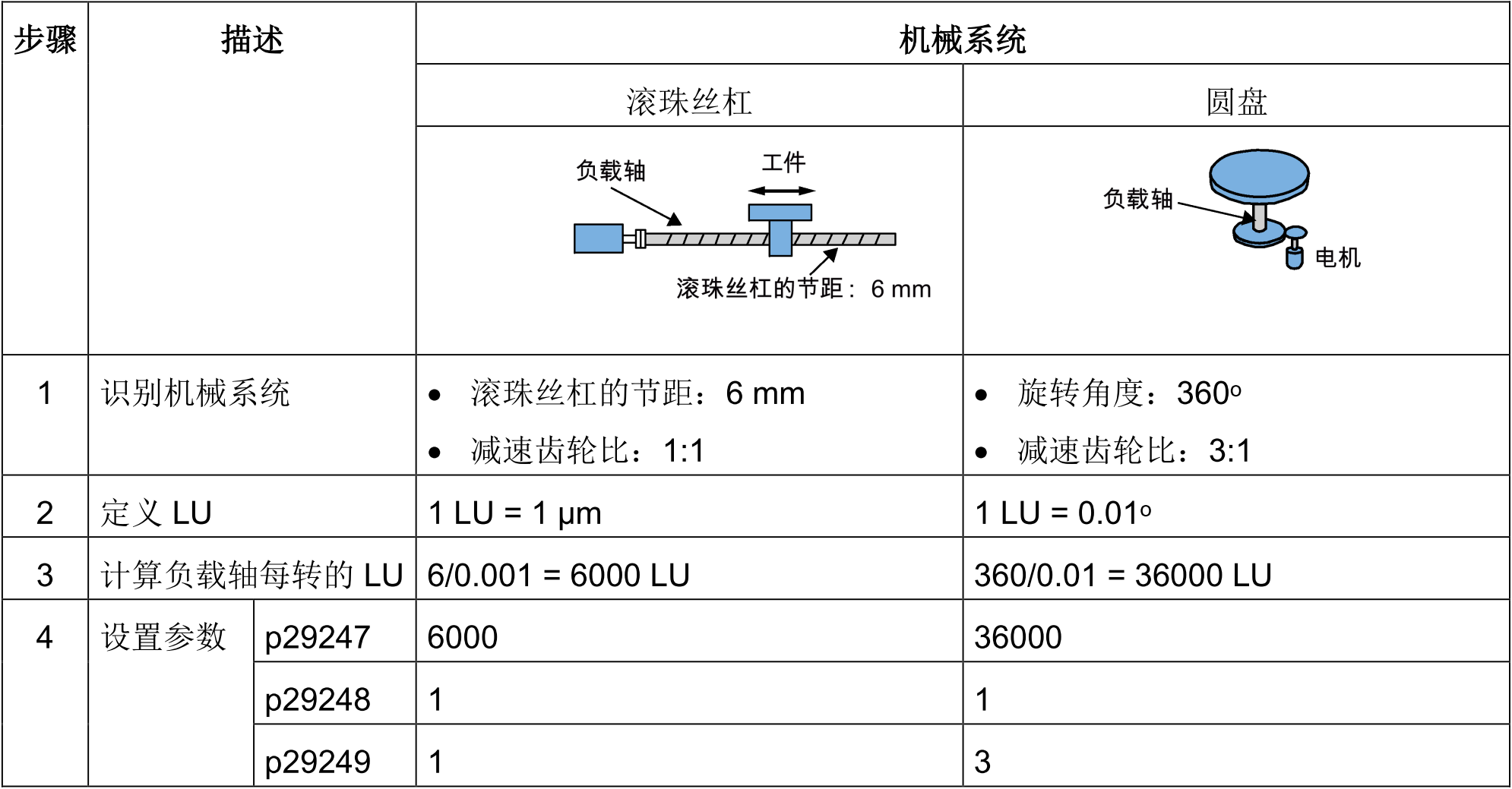
EPOS模式下機械參數(shù)如何設置,?

EPOS模式在驅(qū)動中的位置單位為(LU),所有的位置設定,,相關速度值和加速度值以及加加速度值在EPOS模式中都以LU為單位,。
P29247為負載每轉(zhuǎn)的LU值,其可以自己定義,。目的是讓負載每轉(zhuǎn)的位移單位與EPOS中的LU建立關系,,例如:負載每轉(zhuǎn)10mm,P29247設置為10000LU,,也就是10mm=10000LU,,那么設定1LU,負載會位移0.001mm(=1um)
相關參數(shù):

西門子6ES7590-1AE80-0AA0
Actvelocity管腳顯示為:36126556
其實是因為實際速度反饋需要進行轉(zhuǎn)換:
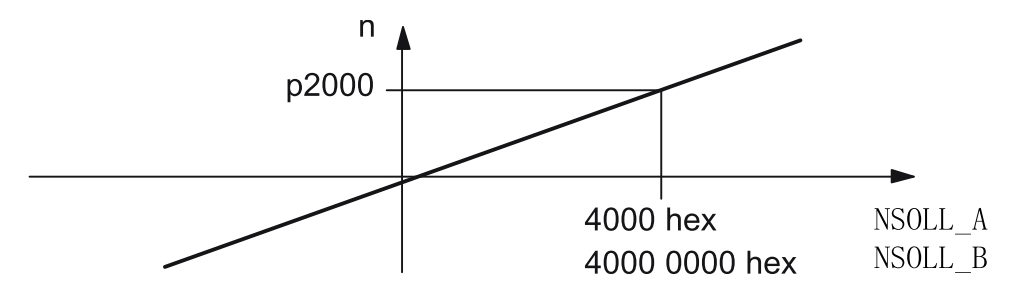
那么正確的轉(zhuǎn)化做法如下:
先將4000000H轉(zhuǎn)化為十進制浮點數(shù)為1073741824.0,,再將實際顯示轉(zhuǎn)速轉(zhuǎn)換為浮點數(shù)后除以該值,,然后乘以驅(qū)動中P2000的參考轉(zhuǎn)速值即可(本例中P2000=3000.0RPM),也就是:
36126556.0/1073741824.0*3000.0=100.0RPM(約等于)
 值編碼器掉電后位置丟失,?
值編碼器掉電后位置丟失,?
? EPOS模式下,,掉電后單圈值編碼器電機是否移動超過了半圈,多圈值編碼器是否移動超過2048圈,。
? 對于單圈值編碼器,,可以按照以下方法設置虛擬多圈功能:
p29243 = 1激活位置跟蹤功能,參數(shù)p29244設置虛擬多圈圈數(shù),,大圈數(shù)可設置為2048,,移動范圍為±1024。
FB284怎樣實現(xiàn)定位控制,?
? 運行模式選擇 ModePos=2
? Jog1 及Jog2 必須設置為 "0"
? 軸必須已回零或編碼器已被校準
? CancelTransing=1,,IntermediateS*,
? ConfigEpos=16#00000003
? 設置目標位置Position和速度Velocity,,參數(shù) Positive 及 Negative 必須為 "0"
? 通過輸入?yún)?shù) OverV,、OverAcc,、OverDec 速度,、加減速度的倍率,,通常采取默認設置即可(*)。
? 驅(qū)動的運行命令 EnableAxis=1
? ExecuteMode上升沿觸發(fā)定位運動
FB284怎樣實現(xiàn)相對定位控制,?
? 運行模式選擇 ModePos=1
? Jog1 及Jog2 必須設置為 "0"
? 軸可以不回零或不校正值編碼器
?
? 設置定位長度Position和速度Velocity,,運動方向由Postion給定的正負決定
? 通過輸入?yún)?shù) OverV、OverAcc,、OverDec 速度,、加減速度的倍率,通常采取默認設置即可(*),。
? 驅(qū)動的運行命令 EnableAxis=1
? ExecuteMode上升沿觸發(fā)定位運動
FB284怎樣實現(xiàn)連續(xù)運行模式控制,?
"連續(xù)運行"模式允許軸的位置控制器在正向或反向以一個恒定的速度運行
? 運行模式選擇 ModePos=3
? Jog1 及Jog2 必須設置為 "0"
? 軸不必回零或編碼器未被校正
? CancelTransing=1,IntermediateS*
? ConfigEpos=16#00000003
? 通過輸入?yún)?shù) Velocity 運行速度,,運行方向由 Positive 及 Negative 決定
? 通過輸入?yún)?shù) OverV,、OverAcc、OverDec 速度,、加減速度的倍率,,通常采取默認設置即可(*)。
? 驅(qū)動的運行命令 EnableAxis=1
? ExecuteMode 的上升沿觸發(fā)定位運動