6ES7522-1BH10-0AA0
FB284功能說(shuō)明
 帶增量編碼器V90,,使用參考擋塊+編碼器零脈沖方式回零時(shí),參考擋塊回零開關(guān)接到哪里,,怎樣配置
帶增量編碼器V90,,使用參考擋塊+編碼器零脈沖方式回零時(shí),參考擋塊回零開關(guān)接到哪里,,怎樣配置
回零開關(guān)連接到一個(gè)PLC的數(shù)字量輸入點(diǎn),,PLC內(nèi)編程將其狀態(tài)關(guān)聯(lián)到FB284功能塊ConfigEPos輸入引腳的bit6。
(1)將V90參數(shù)P29240設(shè)置為1(選擇參考擋塊+零脈沖方式回零);
(2)將回零開關(guān)連接到一個(gè)PLC的數(shù)字量輸入點(diǎn);
(3)在PLC內(nèi)編程,,將回零開關(guān)DI點(diǎn)的狀態(tài)關(guān)聯(lián)到FB284功能ConfigEPos輸入引腳的bit6;
(4)FB284功能塊選擇工作模式ModPos=4;
(5)通過(guò)輸入?yún)?shù)OverV,、OverAcc、OverDec速度,、加減速度的倍率(*);
(6)驅(qū)動(dòng)的運(yùn)行命令EnableAxis=1;
(7)運(yùn)行條件 "CancelTransing" 及 "IntermediateStop"必須設(shè)置為 "1",,Jog1 及 Jog2 必須設(shè)置為 "0"。
通過(guò)ExecuteMode 的上升沿觸發(fā)回零運(yùn)動(dòng),?;亓阃瓿珊?AxisRef"輸出為1。
FB284怎樣實(shí)現(xiàn)定位控制
? 運(yùn)行模式選擇 ModePos=2
? Jog1 及Jog2 必須設(shè)置為 "0"
? 軸必須已回零或編碼器已被校準(zhǔn)
? CancelTransing=1,,IntermediateS*,,
? ConfigEpos=16#00000003
? 設(shè)置目標(biāo)位置Position和速度Velocity,參數(shù) Positive 及 Negative 必須為 "0"
? 通過(guò)輸入?yún)?shù) OverV、OverAcc,、OverDec 速度,、加減速度的倍率,通常采取默認(rèn)設(shè)置即可(*),。
? 驅(qū)動(dòng)的運(yùn)行命令 EnableAxis=1
? ExecuteMode上升沿觸發(fā)定位運(yùn)動(dòng)
FB284怎樣實(shí)現(xiàn)相對(duì)定位控制
? 運(yùn)行模式選擇 ModePos=1
? Jog1 及Jog2 必須設(shè)置為 "0"
? 軸可以不回零或不校正值編碼器
? CancelTransing=1,,IntermediateS*
? ConfigEpos=16#00000003
? 設(shè)置定位長(zhǎng)度Position和速度Velocity,運(yùn)動(dòng)方向由Postion給定的正負(fù)決定
? 通過(guò)輸入?yún)?shù) OverV,、OverAcc,、OverDec 速度、加減速度的倍率,,通常采取默認(rèn)設(shè)置即可(*),。
? 驅(qū)動(dòng)的運(yùn)行命令 EnableAxis=1
? ExecuteMode上升沿觸發(fā)定位運(yùn)動(dòng)
FB284怎樣實(shí)現(xiàn)連續(xù)運(yùn)行模式控制
"連續(xù)運(yùn)行"模式允許軸的位置控制器在正向或反向以一個(gè)恒定的速度運(yùn)行
? 運(yùn)行模式選擇 ModePos=3
? Jog1 及Jog2 必須設(shè)置為 "0"
? 軸不必回零或編碼器未被校正
? CancelTransing=1,IntermediateS*
? ConfigEpos=16#00000003
? 通過(guò)輸入?yún)?shù) Velocity 運(yùn)行速度,,運(yùn)行方向由 Positive 及 Negative 決定
? 通過(guò)輸入?yún)?shù) OverV,、OverAcc、OverDec 速度,、加減速度的倍率,,通常采取默認(rèn)設(shè)置即可(*)。
? 驅(qū)動(dòng)的運(yùn)行命令 EnableAxis=1
? ExecuteMode 的上升沿觸發(fā)定位運(yùn)動(dòng)
FB284怎樣實(shí)現(xiàn)程序塊運(yùn)行控制
此程序塊運(yùn)行模式通過(guò)驅(qū)動(dòng)功能"Traversing blocks"來(lái)實(shí)現(xiàn),,它允許自動(dòng)創(chuàng)建程序塊,、運(yùn)行至檔塊、設(shè)置及復(fù)位輸出,。
要求:
? 運(yùn)行模式選擇ModePos=6
? ConfigEpos=16#00000003
? 軸靜止
? 軸必須已回零或值編碼器已校正
步驟:
? 工作模式,、目標(biāo)位置及動(dòng)態(tài)響應(yīng)已在V90 PN驅(qū)動(dòng)的運(yùn)行塊參數(shù)中進(jìn)行設(shè)置,輸入?yún)?shù) OverV,、OverAcc,、OverDec 速度、加減速度的倍率,,通常采取默認(rèn)設(shè)置即可(*),。
? 運(yùn)行條件"CancelTransing" 及 "IntermediateStop"必須設(shè)置為 "1",Jog1 及 Jog2 必須設(shè)置為 "0"
? 程序塊號(hào)在輸入?yún)?shù) "Position" 中設(shè)置,,取值應(yīng)為 0~ 16
? 運(yùn)動(dòng)的方向由與工作模式及程序塊中的設(shè)置決定,,與Positive 及Negative參數(shù)無(wú)關(guān),必須將它們?cè)O(shè)置為"0",。
? 驅(qū)動(dòng)的運(yùn)行命令A(yù)xisEnable=1
選擇程序塊號(hào)后通過(guò)Execute Mode的上升沿來(lái)觸發(fā)運(yùn)行,。
FB284怎樣實(shí)現(xiàn)點(diǎn)動(dòng)"Jog"控制
點(diǎn)動(dòng)運(yùn)行模式通過(guò)驅(qū)動(dòng)的"Jog"功能來(lái)實(shí)現(xiàn)。
要求:
? 運(yùn)行模式選擇ModePos=7
? ConfigEpos=16#00000003
? 軸靜止
? 軸不必回零或值編碼器校正
步驟:
? 點(diǎn)動(dòng)速度在V90 PN中設(shè)置,,速度的OverV參數(shù)對(duì)于點(diǎn)動(dòng)速度設(shè)定值進(jìn)行倍率縮放,,建議使用默認(rèn)值*
? 運(yùn)行條件"CancelTransing" 及 "IntermediateStop"與點(diǎn)動(dòng)運(yùn)行模式無(wú)關(guān),默認(rèn)設(shè)置為 "1"
? 驅(qū)動(dòng)的運(yùn)行命令 AxisEnable=1
? 給出jog1或jog2信號(hào)
相比上一代產(chǎn)品,,RA新系列在功能上,,質(zhì)量及可靠性方面有了很大提高,為用戶提供了很多新功能,,并應(yīng)用在多個(gè)自動(dòng)化控制領(lǐng)域中,。SINAMICSDCMASTER系列整流器是專為直流調(diào)速電機(jī)的電樞和勵(lì)磁設(shè)計(jì)的整流裝置。

因?yàn)樵撔吞?hào)變頻器的控制回路電源不是從直流母線取的,,而是從交流輸入端通過(guò)變壓器單獨(dú)整流出的控制電源,。所以判斷該報(bào)警應(yīng)該是真實(shí)的。所以從電源入手檢查,,輸入電源電壓正確,,濾波電容電壓為伏。由于充電電阻的短路接觸器沒(méi)動(dòng)作,,所以與整流橋無(wú)關(guān),。故障范圍縮小到充電電阻,斷電后用萬(wàn)用表檢測(cè)發(fā)現(xiàn)是充電電阻斷了,。更換電阻馬上就修好了,。的變頻器用了年多后,偶爾上電時(shí)顯示“AL”alarm的縮寫),,說(shuō)明書中說(shuō)CPU擾,。

諧波電流一定時(shí),電壓畸變?cè)谌蹼娫吹那闆r下更加嚴(yán)重,,這種干擾的特征是會(huì)對(duì)使用同一個(gè)電網(wǎng)的設(shè)備形成干擾,,而與設(shè)備與變頻器之間的距離無(wú)關(guān)。射頻傳導(dǎo)發(fā)射干擾由于負(fù)載電壓為脈沖狀,,因此變頻器從電網(wǎng)吸取電流也是脈沖狀,,這種脈沖電流中包含了大量的高頻成分,形成射頻干擾,,這種干擾的特征是會(huì)對(duì)使用同一個(gè)電網(wǎng)的儀表形成干擾,,而與儀表與變頻器之間的距離無(wú)關(guān)。射頻輻射干擾射頻輻射干擾來(lái)自變頻器的輸入電纜和輸出電纜,。變頻器的輸入輸出電纜上有射頻干擾電流時(shí),,由于電纜相當(dāng)于天線,必然會(huì)產(chǎn)生電磁波輻射,,產(chǎn)生輻射干擾,。
6ES7522-1BH10-0AA0
常規(guī)
單擊屬性視圖中的“常規(guī)”選項(xiàng),進(jìn)行下列參數(shù)設(shè)置:
“項(xiàng)目信息”:可以編輯名稱,,作者及注釋等信息,。
“目錄信息”:查看CPU 的訂貨號(hào),組態(tài)的固件版本及特性描述。
“標(biāo)識(shí)與維護(hù)”:用于標(biāo)識(shí)設(shè)備的名稱,,位置等信息,, 可以使用 “Get_IM_Data”指 令讀取信息進(jìn)行識(shí)別。
“校驗(yàn)和”:在編譯過(guò)程中,,系統(tǒng)將通過(guò)*的校驗(yàn)和來(lái)自動(dòng)識(shí)別 PLC 程序,。基于該校驗(yàn)和,,可快速識(shí)別用戶程序并判斷兩個(gè) PLC 程序是否相同,。通過(guò)指令“GetChecksum”可以讀取校驗(yàn)和,如圖 1 所示:
圖1 標(biāo)識(shí)與維護(hù)及校驗(yàn)和
PROFINET 接口
單擊“PROFINET接口[X1]”,,配置以下參數(shù):
“常規(guī)”:標(biāo)識(shí)PROFINET接口的名稱,,作者和注釋
“以太網(wǎng)地址”:如圖 2 所示。
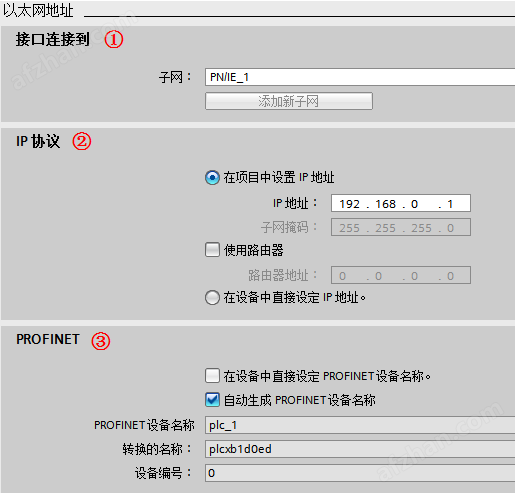
圖2 配置以太網(wǎng)地址
①“接口連接到”:可以從下拉菜單中選擇本接口連接到的子網(wǎng),,也可以添加新的網(wǎng)絡(luò),;
②“IP 協(xié)議”:默認(rèn)為“在項(xiàng)目中設(shè)置IP 地址”,此時(shí)在項(xiàng)目組態(tài)中設(shè)置IP地址,,子網(wǎng)掩碼等,。如果使用路由器,則激活“使用路由器”,,并設(shè)置路由器地址,。也可以選擇“在設(shè)備中直接設(shè)定 IP 地址”,則可以在程序中使用指令“T_CONFIG”分配IP 地址,;
③“PROFINET”:
激活“在設(shè)備中直接設(shè)定PROFINET 設(shè)備名稱,,則表示不在硬件組態(tài)中組態(tài)設(shè)備名稱,而是在程序中使用指“T_CONFIG”設(shè)置設(shè)備名,。
激活“自動(dòng)生成PROFINET 設(shè)備名稱”,TIA 博途根據(jù)接口名稱自動(dòng)生成PROFINET設(shè)備名稱,。
“轉(zhuǎn)換的名稱”,是指此PROFINET 設(shè)備名稱轉(zhuǎn)換為符合 DNS 慣例的名稱,,用戶不能修改,。
“設(shè)備編號(hào)”,是指 PROFINET IO 設(shè)備的編號(hào),。在發(fā)生故障時(shí)可以通過(guò)編程讀取該編號(hào),。對(duì)于IO 控制器默認(rèn)為0, 無(wú)法修改,。
“時(shí)間同步”:
可以激活“通過(guò)NTP 服務(wù)器啟動(dòng)同步時(shí)間”,。NTP(Network Time Protocol) 即網(wǎng)絡(luò)時(shí)間協(xié)議,可用于同步網(wǎng)絡(luò)中系統(tǒng)時(shí)鐘的一種通用機(jī)制,??梢詫?shí)現(xiàn)跨子網(wǎng)的時(shí)間同步,,精度則取決于所使用的NTP 服務(wù)器和網(wǎng)絡(luò)路徑等特性。在NTP 時(shí)間同步模式下,,CPU 的接口按設(shè)定的“更新間隔”時(shí)間(單位為秒)從 NTP 服務(wù)器定時(shí)獲取時(shí)鐘同步,,時(shí)間間隔的取值范圍在10秒到一天之間, 這里多可以添加4個(gè)NTP服務(wù)器。
“CPU與該設(shè)備中的模塊進(jìn)行數(shù)據(jù)同步”:是指同步 CM/CP 的時(shí)間和CPU 的時(shí)間,。
 注意:
注意:
建議在CM/CP和CPU中,,只對(duì)一個(gè)模塊進(jìn)行時(shí)間同步,,以便使站內(nèi)的時(shí)間保持*,。
“操作模式”:
可以設(shè)置“IO 控制器”或是 “IO設(shè)備”。如果該 CPU 作為智能設(shè)備,,則激活“IO設(shè)備”,,并在“已分配的 IO 控制器中”, 選擇該IO 設(shè)備的IO 控制器(如果 IO 控制器不在同一項(xiàng)目中,,則選擇“未分配”),。并根據(jù)需要選擇是否激活“PN 接口的參數(shù)由上位 IO 控制器進(jìn)行分配”和“優(yōu)先啟用”等參數(shù),以及設(shè)置智能設(shè)備的通信傳輸區(qū)等,。
高級(jí)選項(xiàng):可以對(duì)“接口選項(xiàng)”,,“介質(zhì)冗余”,“實(shí)時(shí)設(shè)定”和“端口”進(jìn)行設(shè)置,。
“Web 服務(wù)器訪問(wèn)”:
激活“啟用使用該接口訪問(wèn) Web 服務(wù)器”,,則可以通過(guò)該接口訪問(wèn)集成在 CPU 內(nèi)部的 Web 服務(wù)器。
“硬件標(biāo)識(shí)符”:接口的診斷地址
數(shù)字量輸入輸出
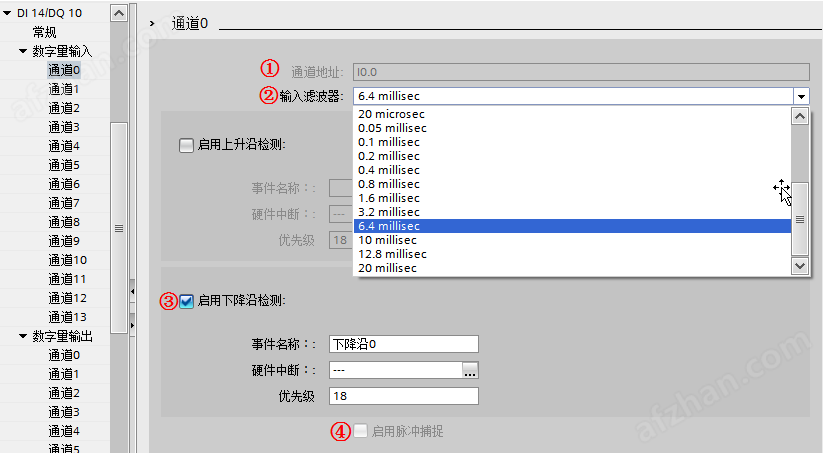
“常規(guī)”:?jiǎn)螕魯?shù)字量輸入/輸出的“常規(guī)”選項(xiàng)可以輸入項(xiàng)目信息:
- “名稱”:定義更改組件的名稱
- “注釋”:說(shuō)明模塊或設(shè)備的用途
“數(shù)字量輸入”:以通道0 的組態(tài)為例進(jìn)行說(shuō)明,,如圖 3 所示,。
 您好, 歡迎來(lái)到化工儀器網(wǎng)
您好, 歡迎來(lái)到化工儀器網(wǎng)















