西門(mén)子6ES7468-3BB50-0AA0
PID調(diào)節(jié)步驟簡(jiǎn)介
建議PID參數(shù)調(diào)節(jié)步驟:
(1)前提條件:反饋信號(hào)是否穩(wěn)定,,執(zhí)行機(jī)構(gòu)是否正常以及控制器的正反作用,。(確保PID在自動(dòng)模式下)
(2)積分時(shí)間設(shè)置為無(wú)窮大INF(或9999.9),此時(shí)積分作用近似為0,;將微分時(shí)間設(shè)置為0.0,,此時(shí)微分作用為0 。然后開(kāi)始調(diào)節(jié)比例作用,,逐步增大比例增益
(3)當(dāng)過(guò)程變量達(dá)到給定值且在給定值上下波動(dòng),,將調(diào)好的比例系數(shù)調(diào)整到50%~80%后,由大到小減小積分時(shí)間,,直到過(guò)程值與設(shè)定值相等或無(wú)限接近
PID調(diào)節(jié)有很多種方法,,以上僅是建議步驟,,也并未考慮微分作用,客戶依據(jù)實(shí)際情況靈活調(diào)節(jié),,同時(shí)可以參考反饋與給定的曲線圖
用戶經(jīng)常會(huì)遇到這樣的問(wèn)題:嘗試了很多組PID參數(shù),,都無(wú)法滿足控制器的要求, 此時(shí)需要考慮PID的采樣時(shí)間是否適合當(dāng)前系統(tǒng),。采樣時(shí)間就是對(duì)反饋進(jìn)行采樣的間隔,。短于采樣時(shí)間間隔的信號(hào)變化是不能測(cè)量到的。采樣時(shí)間過(guò)短,,兩次實(shí)測(cè)值的變化量太小,,也不合適,而且增加PLC的運(yùn)算負(fù)擔(dān);采樣間隔過(guò)長(zhǎng),,將會(huì)引起有用信號(hào)的丟失,,使系統(tǒng)品質(zhì)變差,不能滿足擾動(dòng)變化比較快,、或者速度響應(yīng)要求高的場(chǎng)合。除此以外,也有可能是系統(tǒng)自身的問(wèn)題,,無(wú)法調(diào)節(jié)到穩(wěn)定,例如,, 不規(guī)律的干擾,,或者反饋信號(hào)不穩(wěn)定。
手動(dòng)調(diào)節(jié)PID至穩(wěn)定
在開(kāi)始PID自整定調(diào)整前,,整個(gè)PID控制回路必須工作在相對(duì)穩(wěn)定的狀態(tài),。
穩(wěn)定的PID是指過(guò)程變量接近設(shè)定值,輸出不會(huì)不規(guī)則的變化,,且回路的輸出值在控制范圍中心附近變化,。
問(wèn)題與解決方法:
1.PID輸出總是輸出很大的值,并在這一區(qū)間內(nèi)調(diào)節(jié)變化
產(chǎn)生原因:
- 增益值太高
- PID掃描時(shí)間太長(zhǎng)(對(duì)于快速響應(yīng)PID的回路)
解決方法:降低增益值并且/或選擇短一些的掃描時(shí)間
2.過(guò)程變量超過(guò)設(shè)定值很多(超調(diào)很大)

產(chǎn)生原因:積分時(shí)間可能太高
解決方法:降低積分時(shí)間
3.得到一個(gè)非常不穩(wěn)定的PID

產(chǎn)生原因:
- 如果用了微分,,可能是微分參數(shù)有問(wèn)題
- 沒(méi)有微分,,可能是增益值太高
解決方法:
- 調(diào)整微分參數(shù)到0-1的范圍內(nèi)
- 根據(jù)回路調(diào)節(jié)特性將增益值降低,低可從0.x 開(kāi)始逐漸增大往上調(diào),,直到獲得穩(wěn)定的PID,。
4.如何獲取一組合適的參數(shù),實(shí)現(xiàn)快速并穩(wěn)定的PID控制,?
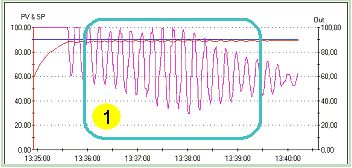
PID調(diào)節(jié)過(guò)程中,,用戶通常需要做多次的參數(shù)調(diào)節(jié)才能獲得的控制效果。從下面反饋(過(guò)程變量)與給定之間的曲線圖中,,可以看到黃色曲線較理想,。用戶可以將調(diào)節(jié)的PID反饋與給定曲線與下圖中對(duì)比,,并修改相關(guān)參數(shù)(但是因?yàn)楝F(xiàn)場(chǎng)情況不一樣,用戶還需具體問(wèn)題具體對(duì)待,,下圖中的建議僅供參考:

反饋與給定曲線
1.超調(diào)過(guò)大,,減小比例,增大積分時(shí)間
2.迅速變化,,存在小超調(diào)
3.實(shí)際值緩慢接近設(shè)定值,,并且無(wú)超調(diào)的達(dá)到設(shè)定值
4.增益系數(shù)太小和/或微分時(shí)間太長(zhǎng)
5.益系數(shù)太小和/或積分時(shí)間太長(zhǎng)
WinCC 與S7-200 SMART CPU 的 OPC 通信
WinCC 中沒(méi)有與S7-200 SMART CPU 通信的驅(qū)動(dòng),所以 WinCC 與 S7-200 SMART CPU 之間通過(guò)以太網(wǎng)的通信,,只能通過(guò) OPC 的方式實(shí)現(xiàn),。S7-200 SMART CPU 作為 OPC 的 Sever 端,只需設(shè)置 IP 地址即可,。
上位機(jī)作為 OPC 的 Client 端,,通過(guò) SIMATIC NET 軟件建立 PC Station 來(lái)與 S7-200 SMART 通信。
建立好 PC Station 后,,WinCC中的實(shí)現(xiàn)步驟如下:
1. 建立所有WinCC中要用到的變量
首先在 OPC Scout中建立好所有 WinCC 中要用到的變量,,步驟見(jiàn)OPC Scout 測(cè)試。
2. 添加新的驅(qū)動(dòng)
打開(kāi) WinCC 軟件新建一個(gè)項(xiàng)目,,用鼠標(biāo)右鍵點(diǎn)擊“變量管理”,,快捷菜單中選擇“打開(kāi)”。
在打開(kāi)的“WinCC Configuration Studio ”窗口中,,鼠標(biāo)右鍵“變量管理”,,在快捷菜單中選擇“添加新的驅(qū)動(dòng)程序”,添加“OPC”驅(qū)動(dòng),。如圖1.所示,。
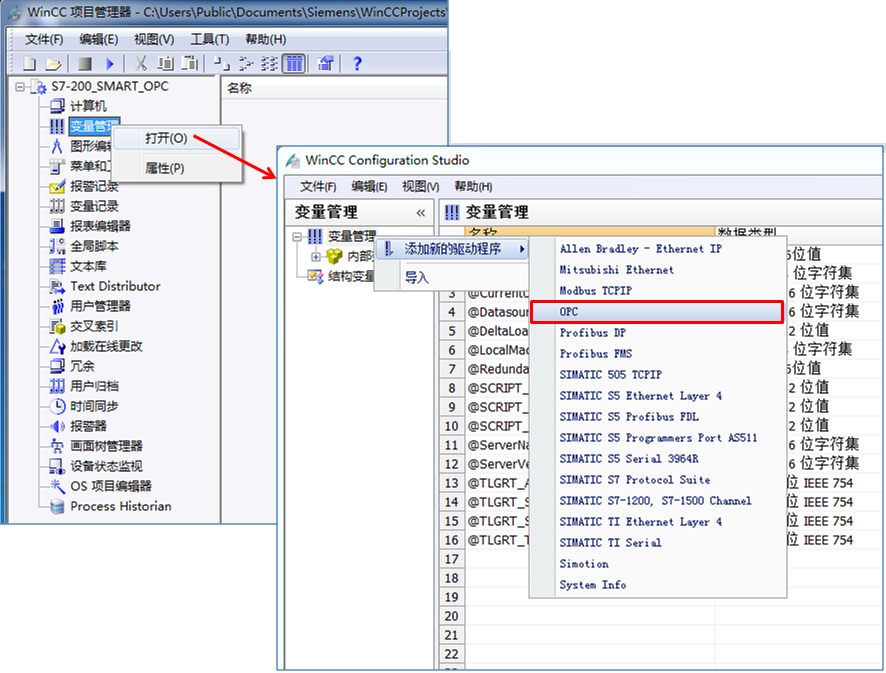
圖1. 添加一個(gè)新的驅(qū)動(dòng)"OPC"
3. 在 WinCC 中搜索及添加 OPC Scout 中定義的變量
首先用鼠標(biāo)右鍵“OPC Groups” ,在快捷菜單中點(diǎn)擊“系統(tǒng)參數(shù)”,。在彈出“OPC 條目管理器”窗口中,,選擇“OPC.SimaticNET.1”,然后點(diǎn)擊“瀏覽服務(wù)器”按鈕,。
在彈出的“過(guò)濾標(biāo)準(zhǔn)”窗口中選擇“下一步” 進(jìn)行搜索,。如圖2.所示。
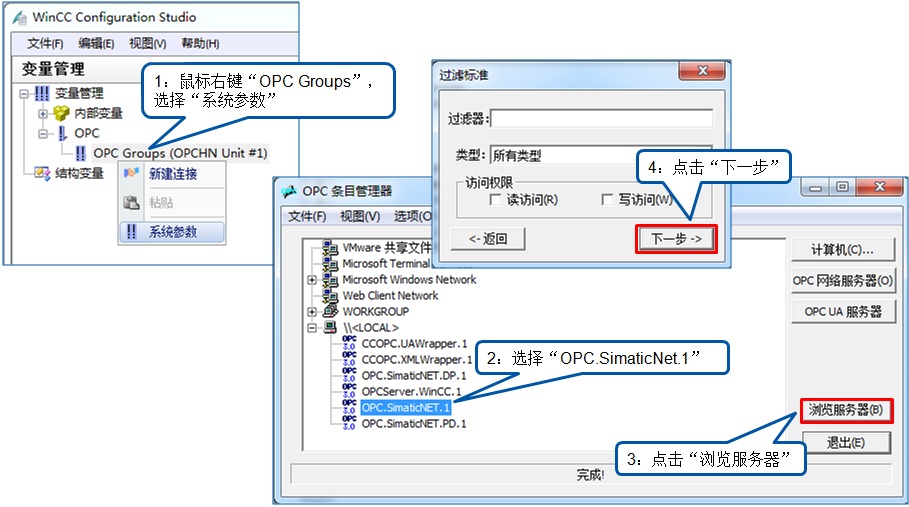
圖2.選擇服務(wù)器瀏覽
4. 建立新連接并添加所需變量
在變量列表中選擇所需要的變量,,點(diǎn)“添加條目”按鈕添加所需變量,,此時(shí)會(huì)自動(dòng)要求你建立一個(gè)新連接,并將變量添加到這個(gè)連接中,,如圖3.所示,。
如果需要添加多個(gè)變量,按上述步驟重復(fù)添加即可,。

圖3.添加變量并建立連接
成功添加完變量后,,WinCC 中變量管理中將顯示已經(jīng)添加的 OPC 連接和變量,,如圖4.所示。

圖4.從OPC Scout中成功添加變量
5. WINCC 創(chuàng)建畫(huà)面并監(jiān)控變量
WINCC 中新建畫(huà)面,,并添加“輸入/輸出 域”,,并為其選擇 OPC 變量,如圖5.所示,。

圖5.創(chuàng)建 WINCC 畫(huà)面
激活 WINCC ,,即可測(cè)試 WINCC 與 S7-200 SMART OPC 通訊。
S7-300/400與S7-200SMART之間的以太網(wǎng)S7通信
S7通信是S7系列PLC基于MPI,、PROFIBUS,、ETHERNET網(wǎng)絡(luò)的一種優(yōu)化的通信協(xié)議,主要用于S7-300/400PLC之間的通信,。
經(jīng)過(guò)測(cè)試發(fā)現(xiàn)S7-300/400通過(guò)集成的PN口或CP343-1/CP443-1與S7-200 SMART PLC 之間的S7通信也是可以成功的,, 但是需要S7-300/400側(cè)編程調(diào)用PUT/GET指令。
注意:
1.S7-200 SMART CPU 與S7-300/400 CPU 之間的S7通信未經(jīng)西門(mén)子測(cè)試,,本文檔僅供客戶測(cè)試使用,,使用該種通信方式所產(chǎn)生的任何危險(xiǎn)需要有客戶自己承擔(dān)!
2.S7-200 SMARTPLC V2.0 版本才開(kāi)始支持PUT/GET通信,,V1.0版本的CPU需要升級(jí)固件后方可支持PUT/GET,。
3. S7-300/400若采用CP通信時(shí),,則需要采用Standard或Advanced類型通信模塊,,CP343-1 Lean模塊不支持,。
4.本文僅介紹S7-300集成PN口與S7-200 SMART CPU S7通信,。
S7通信介紹
S7通信是S7系列PLC基于MPI,、PROFIBUS,、ETHERNET網(wǎng)絡(luò)的一種優(yōu)化的通信協(xié)議,主要用于S7-300/400PLC之間的通信,。
S7-300/400通過(guò)以太網(wǎng)接口與S7-200 SMART PLC 之間的S7通訊經(jīng)過(guò)測(cè)試是可以成功的,但是需要S7-300/400側(cè)編程調(diào)用PUT/GET指令,,見(jiàn)表1所示。
表 1 PUT和GET :
| S7-400 | S7-300 | 描述 | 簡(jiǎn)要描述 |
| SFB 14 | FB 14 | 讀數(shù)據(jù) | 單邊編程讀訪問(wèn),。 |
| SFB 15 | FB 15 | 寫(xiě)數(shù)據(jù) | 單邊編程寫(xiě)訪問(wèn),。 |
S7-300/400根據(jù)使用通信接口(集成的PN口或CP343-1/CP443-1)不同,調(diào)用的功能塊來(lái)源也不同,。
通信接口為S7-300 集成PN接口時(shí),,需要使用Standard Library中PUT/GET指令,如圖1所示。

圖1 S7-300PN接口需采用Standard Library
通信接口為S7-300 CP通信模塊時(shí),,需要使用SIMATIC_NET_CP 庫(kù)中PUT/GET指令,,如圖2所示。

圖2 S7-300 CP模塊接口需采用SIMATIC_NET_CP庫(kù)
S7-400 CPU不區(qū)分通信接口,,需要使用System Function Blocks 中的SFB14/SFB15指令塊,如圖3所示。

圖3 S7-400 需采用SFB程序塊
硬件及網(wǎng)絡(luò)組態(tài)
本文以采用1個(gè)315-2PN/DP,1個(gè)S7-200 SMART PLC為例,介紹它們之間的S7通信,。
在STEP7中創(chuàng)建一個(gè)新項(xiàng)目,,項(xiàng)目名稱為S7-300-SMART。插入1個(gè)S7-300站,,在硬件組態(tài)中插入CPU 315-2 PN/DP,。如圖4所示。

圖4 STEP7 項(xiàng)目中插入S7-300站點(diǎn)
設(shè)置CPU 315-2PN/DP的IP地址:192.168.0.1,,如圖5所示,。硬件組態(tài)完成后,即可下載該組態(tài),。

圖5 設(shè)置CPU PN IP地址
打開(kāi)“NetPro”設(shè)置網(wǎng)絡(luò)參數(shù),,選中CPU 315-2PN/DP,在連接列表中建立新的連接,。步驟如圖6所示,。

圖6 NetPro組態(tài)視圖中插入新連接
選擇 Unspecified 站點(diǎn),選擇通訊協(xié)議 S7 connection,,點(diǎn)擊 Apply,,如圖7所示。

圖7 組態(tài)新連接
在彈出的S7 connection屬性對(duì)話框中,,勾選 Establish an active connection,設(shè)置Partner address:192.168.0.2(S7-200 SMART PLC IP 地址),,如圖8所示,。

圖8 設(shè)置S7連接參數(shù)
點(diǎn)擊 "Address Details" ,,再?gòu)棾鰜?lái)的對(duì)話框設(shè)置 Partner 的 Slot 為1,如圖9所示,。點(diǎn)擊 OK即可關(guān)閉該對(duì)話框,。

圖9 設(shè)置“address details”參數(shù)
網(wǎng)絡(luò)組態(tài)創(chuàng)建完成后,,需要編譯,,如圖10所示,。

圖10 保存并編譯連接
網(wǎng)絡(luò)組態(tài)編譯無(wú)錯(cuò),鼠標(biāo)先點(diǎn)擊 CPU 315-2PN/DP ,然后點(diǎn)擊下載按鈕下載網(wǎng)絡(luò)組態(tài),,步驟如圖11所示,。

圖 11 下載組態(tài)連接
程序編程
可以通過(guò)SFB/FB 14 "GET",從遠(yuǎn)程CPU中讀取數(shù)據(jù),。
S7-300:在REQ的上升沿處讀取數(shù)據(jù),。在REQ的每個(gè)上升沿處傳送參數(shù)ID、ADDR_1和RD_1,。在每個(gè)作業(yè)結(jié)束之后,,可以分配新數(shù)值給ID、ADDR_1和RD_1參數(shù),。
S7-400:在控制輸入REQ的上升沿處啟動(dòng)SFB,。在此過(guò)程中,將要讀取的區(qū)域的相關(guān)指針(ADDR_i)發(fā)送到伙伴CPU,。遠(yuǎn)程伙伴返回此數(shù)據(jù),。在 下一個(gè)SFB/FB調(diào)用處,已接收的數(shù)據(jù)被復(fù)制到組態(tài)的接收區(qū)(RD_i)中,。必須要確保通過(guò)參數(shù)ADDR_i和RD_i定義的區(qū)域在長(zhǎng)度和數(shù)據(jù)類型方面 要相互匹配,。
通過(guò)狀態(tài)參數(shù)NDR數(shù)值為1來(lái)指示此作業(yè)已完成。只有在前一個(gè)作業(yè)已經(jīng)完成之后,,才能重新激活讀作業(yè),。遠(yuǎn)程CPU可以處于RUN或STOP工作狀態(tài)。如果 正在讀取數(shù)據(jù)時(shí)發(fā)生訪問(wèn)故障,,或如果數(shù)據(jù)類型檢查過(guò)程中出錯(cuò),,則出錯(cuò)和警告信息將通過(guò)ERROR和STATUS輸出表示。
通過(guò)使用SFB/FB 15 "PUT",,可以將數(shù)據(jù)寫(xiě)入到遠(yuǎn)程CPU,。
S7-300:在REQ的上升沿處發(fā)送數(shù)據(jù)。在REQ的每個(gè)上升沿處傳送參數(shù)ID,、ADDR_1和SD_1,。在每個(gè)作業(yè)結(jié)束之后,可以給ID,、ADDR_1和SD_1參數(shù)分配新數(shù)值,。
S7-400:在控制輸入REQ的上升沿處啟動(dòng)SFB。在此過(guò)程中,,將指向要寫(xiě)入數(shù)據(jù)的區(qū)域(ADDR_i)的指針和數(shù)據(jù)(SD_i)發(fā)送到伙伴CPU,。 遠(yuǎn)程伙伴將所需要的數(shù)據(jù)保存在隨數(shù)據(jù)一起提供的地址下面,并返回一個(gè)執(zhí)行確認(rèn),。必須要確保通過(guò)參數(shù)ADDR_i和SD_i定義的區(qū)域在編號(hào),、長(zhǎng)度和數(shù)據(jù)類 型方面相互匹配,。
如果沒(méi)有產(chǎn)生任何錯(cuò)誤,則在下一個(gè)SFB/FB調(diào)用時(shí),,通過(guò)狀態(tài)參數(shù)DONE來(lái)指示,,其數(shù)值為1。只有在后一個(gè)作業(yè)完成之后,,才能再次激活寫(xiě)作業(yè),。遠(yuǎn)程 CPU可以處于RUN或STOP模式。如果正在寫(xiě)入數(shù)據(jù)時(shí)發(fā)生訪問(wèn)故障,,或如果執(zhí)行檢查過(guò)程中出錯(cuò),,則出錯(cuò)和警告信息將通過(guò)ERROR和STATUS輸出 表示。
打開(kāi)SIMATIC 315 PN-1的OB1,,在OB1中依次調(diào)用FB14,,F(xiàn)B15如圖12、圖13所示:

圖12 FB14調(diào)用
表2.FB14參數(shù)說(shuō)明 :
參數(shù) | 描述 | 數(shù)據(jù)類型 | 存儲(chǔ)區(qū) | 描述 |
REQ | INPUT | BOOL | I,、Q,、M、D,、L | 上升沿觸發(fā)調(diào)用功能塊 |
ID | INPUT | WORD | M,、D、常數(shù) | 地址參數(shù)ID |
NDR | OUTPUT | BOOL | I,、Q,、M、D,、L | 為1時(shí),,接收數(shù)據(jù)成功 |
ERROR | OUTPUT | BOOL | I、Q,、M,、D、L | 接收到新數(shù)據(jù) |
STATUS | OUTPUT | WORD | I,、Q,、M、D,、L | 故障代碼 |
S7-300:
ADDR_1
S7-400:
ADDR_i
(1 ≤ i ≤ 4) | IN_OUT | ANY | M,、D I、Q,、M,、D、
T,、C | 從S7-200 SMART的數(shù)據(jù)地址中讀取數(shù)據(jù);V區(qū)數(shù)據(jù)對(duì)應(yīng)DB1,。 |
S7-300:
RD_1
S7-400:
RD_i
(1 ≤ i ≤ 4) | IN_OUT | ANY | S7-300:M,、D
S7-400 I、Q,、
M,、D、T,、C | 本站接收數(shù)據(jù)地址 |

圖13 FB15調(diào)用
表3.FB15參數(shù)說(shuō)明 :
參數(shù) | 描述 | 數(shù)據(jù)類型 | 存儲(chǔ)區(qū) | 描述 |
REQ | INPUT | BOOL | I、Q,、M,、D、L | 上升沿觸發(fā)調(diào)用功能塊 |
ID | INPUT | WORD | M,、D,、常數(shù) | 地址參數(shù) |
DONE | OUTPUT | BOOL | I、Q,、M,、D、L | 為1時(shí),,發(fā)送完成 |
ERROR | OUTPUT | BOOL | I,、Q、M,、D,、L | 為1時(shí),有故障發(fā)生 |
STATUS | OUTPUT | WORD | I,、Q,、M、D,、L | 故障代碼 |
S7-300:
ADDR_1
S7-400:
ADDR_i
(1 ≤ i ≤ 4) | IN_OUT | ANY | M,、D I、Q,、M,、D、
T,、C | 從S7-200 SMART的數(shù)據(jù)地址中讀取數(shù)據(jù);V區(qū)數(shù)據(jù)對(duì)應(yīng)DB1,。 |
S7-300:
SD_1
S7-400:
SD_i
(1 ≤ i ≤ 4) | IN_OUT | ANY | S7-300:M、D S7-400 I,、Q,、
M、D,、T,、C | 本站發(fā)送數(shù)據(jù)地址 |
西門(mén)子6ES7468-3BB50-0AA0
如果程序中某些定時(shí)器或計(jì)數(shù)器的設(shè)定值過(guò)大,,為了縮短調(diào)試時(shí)間,,可以在調(diào)試時(shí)將它們減小,,模擬調(diào)試結(jié)束后再寫(xiě)入它們的實(shí)際設(shè)定值。在設(shè)計(jì)和模擬調(diào)試程序的同時(shí),,可以設(shè)計(jì),、制作控制臺(tái)或控制柜,PLC之外的其他硬件的安裝,、接線工作也可以同時(shí)進(jìn)行,。
西門(mén)子PLC的MPI通訊詳解隨著科技的進(jìn)步,智能化芯片的發(fā)展逐漸成熟起來(lái)設(shè)備的智能化程度也相應(yīng)提高,,隨之智能化設(shè)備之間基于開(kāi)放標(biāo)準(zhǔn)的現(xiàn)場(chǎng)總線技術(shù)構(gòu)成的自動(dòng)化控制系統(tǒng)也逐漸成熟起來(lái),。于是西門(mén)子PLC除了使用工業(yè)以太網(wǎng)和profibus。

這一功能的設(shè)定,,可根據(jù)實(shí)際情況在有效和無(wú)效中選擇一項(xiàng)即可,。與之有關(guān)的功能是轉(zhuǎn)差補(bǔ)償控制,其作用是為補(bǔ)償由負(fù)載波動(dòng)而引起的速度偏差,,可加上對(duì)應(yīng)于負(fù)載電流的轉(zhuǎn)差頻率,。這一功能主要用于定位控制。變頻器調(diào)試必設(shè)參數(shù)有哪些,??刂埔饬x是什么。節(jié)能控制風(fēng)機(jī)水泵都屬于減轉(zhuǎn)矩負(fù)載,,即隨著轉(zhuǎn)速的下降,,負(fù)載轉(zhuǎn)矩與轉(zhuǎn)速的平方成比例減小,而具有節(jié)能控制功能的變頻器設(shè)計(jì)有V/f模式,,這種模式可改善電動(dòng)機(jī)和變頻器的效率,,其可根據(jù)負(fù)載電流自動(dòng)降低變頻器輸出電壓,從而達(dá)到節(jié)能目的,,可根據(jù)具體情況設(shè)置為有效或無(wú)效,。

在我們常用的編程、組態(tài),、通訊還用到了MPI,、ASI等技術(shù)。這些技術(shù)協(xié)議實(shí)現(xiàn)西門(mén)子PLC主機(jī)與智能從站之間的通訊,,甚至兼容符合第三方產(chǎn)品的通訊協(xié)議,。西門(mén)子通訊大致有MPI網(wǎng)絡(luò)通訊、PROFIBUS網(wǎng)絡(luò)通訊、工業(yè)以太網(wǎng)通訊這三種,。
西門(mén)子PLC的MPI網(wǎng)絡(luò)通訊MPI叫多點(diǎn)接口通信,,一般用于小范圍、小點(diǎn)數(shù)現(xiàn)場(chǎng)級(jí)通訊,,可實(shí)現(xiàn)西門(mén)子PLC的操作面板(TP/OP)和上位機(jī)之間的數(shù)據(jù)交換,,例如西門(mén)子PLCs7-200/300/400,它的通訊速率19.2Kbit-12Mbit,,多可連接32個(gè)接點(diǎn),,通訊距離50m以內(nèi)。

刪除工作存儲(chǔ)器中由SFC創(chuàng)建的數(shù)據(jù)塊,;剩余的數(shù)據(jù)塊具有來(lái)自裝入存儲(chǔ)器的預(yù)置值,。復(fù)位過(guò)程映像和所有定時(shí)器計(jì)數(shù)器和位存儲(chǔ)器,不管它們是否具有保持性分配,。OB中的程序執(zhí)行一次然后循環(huán)程序開(kāi)始執(zhí)行?!裨跓釂?dòng)中,,在程序中斷處重新開(kāi)始執(zhí)行程序不復(fù)位定時(shí)器計(jì)數(shù)器和位存儲(chǔ)器)。在啟動(dòng)時(shí)所有數(shù)據(jù)標(biāo)志存儲(chǔ)器定時(shí)器計(jì)數(shù)器過(guò)程映像及數(shù)據(jù)塊的當(dāng)前值被保持,,OB中的程序執(zhí)行一次,。然后程序從斷點(diǎn)處斷電,CPUSTOP)恢復(fù)執(zhí)行。
 您好, 歡迎來(lái)到化工儀器網(wǎng)
您好, 歡迎來(lái)到化工儀器網(wǎng)














