西門子CPU主機6ES7314-6BH04-0AB0
PLC使用的九大注意事項:
一、PLC自身故障判斷
一般來說,,PLC是極其可靠的設備,,出故障率很低。PLC的CPU等硬件損壞或軟件運行出錯的概率幾乎為零,;PLC輸入點如不是強電入侵所致,,幾乎也不會損壞,;PLC輸出繼電器的常開點,若不是外圍負載短路或設計不合理,,負載電流超出額定范圍,,觸點的壽命也很長。-西門子PLC
因此,,我們查找電氣故障點,,重點要放在PLC的外圍電氣元件上,不要總是懷疑PLC硬件或程序有問題,,這對快速維修好故障設備,、快速恢復生產是十分重要的,因此筆者所談的PLC控制回路的電氣故障檢修,,重點不在PLC本身,,而是PLC所控制回路中的外圍電氣元件。
二,、輸入輸出(I/O)模塊的選取
輸出模塊分為晶體管,、雙向可控硅、接點型,。晶體管型的開關速度更快(一般0.2ms),,但負載能力更小,約0.2~0.3A,、24VDC,,適用于快速開關、 信號聯系的設備,,一般與變頻,、直流裝置等信號連接,應注意晶體管漏電流對負載的影響,??煽毓栊蛢?yōu)點是無觸點、具有交流負載特性,,負載能力不大,。繼電器輸出具有交直流負載特點,負載能力大,。常規(guī)控制中一般首先選用繼電器觸點型輸出,,缺點是開關速度慢,一般在10ms左右,,不適于高頻開關應用,。
三、接地問題
PLC系統接地要求比較嚴格,更好有獨立的專用接地系統,,還要注意與PLC有關的其他設備也要可靠接地,。多個電路接地點連接在一起時,會產生意想不到的電流,,導致邏輯錯誤或損壞電路,。而產生不同的接地電勢的原因,通常是由于接地點在物理區(qū)域上被分隔的太遠,, 當相距很遠的設備被通信電纜或傳感器連接在一起的時候,,電纜線和地之間的電流就會流經整個電路,即使在很短的距離內,,大型設備的負載電流也可以在其與地電勢之間產生變化,,或者通過電磁作用直接產生不可預知的電流。在不正確的接地點的電源之間,,電路中有可能產生毀滅性的電流,, 以至于破壞設備。PLC系統一般選用一點接地方式,。為了提高抗共模干擾能力,,對于模擬信號可以采用屏蔽浮地技術,即信號電纜的屏蔽層一點接地,,信號回路浮空,,與大地絕緣電阻應不小于50MΩ。
四,、消除線間電容避免誤動作
電纜的各導線間都存在電容,,合格的電纜能把此容值限制在一定范圍之內。即使是合格的電纜,,當電纜長度超過一定長度時,,各線間的電容容值也會超過所要求的值,當把此電纜用于PLC輸入時,,線間電容就有可能引起PLC的誤動作,會出現許多無法理解的現象,。這些現象主要表現為:明接線正確,,但PLC卻沒有輸入;PLC應該有的輸入沒有,,而不應該有的卻有,,即PLC輸入互相干擾。為解決這一問題,,應當做到:
1.使用電纜芯絞合在一起的電纜,;
2.盡量縮短使用電纜的長度;
3.把互相干擾的輸入分開使用電纜;
4.使用屏蔽電纜,。
五,、抗干擾處理
工業(yè)現場的環(huán)境比較惡劣,存在著許多高低頻干擾,。這些干擾一般是通過與現場設備相連的電纜引入PLC的,。除了接地措施外,在電纜的設計選擇和敷設施工中,,應注意采取一些抗干擾措施:
1.模擬量信號屬于小信號,,極易受到外界干擾的影響,應選用雙層屏蔽電纜,;高速脈沖信號(如脈沖傳感器,、計數碼盤等)應選用屏蔽電纜,既防止外來的干擾,,也防止高速脈沖信號對低電平信號的干擾,;
2.PLC之間的通信電纜頻率較高,一般應選用廠家提供的電纜,,在要求不高的情況下,,可以選用帶屏蔽的雙絞線電纜;
3.模擬信號線,、直流信號線不能與交流信號線在同一線槽內走線,;
4.控制柜內引入引出的屏蔽電纜必須接地,應不經過接線端子直接與設備相連,;
5.交流信號,、直流信號和模擬信號不能共用一根電纜,動力電纜應與信號電纜分開敷設,;
6. 在現場維護時,,解決干擾的方法有:對受干擾的線路采用屏蔽線纜,重新敷設,;在程序中加入抗干擾濾波代碼,。
六、標記輸入輸出,,方便檢修
PLC控制著一個復雜系統,,所能看到的是上下兩排錯開的輸入輸出繼電器接線端子、對應的指示燈及PLC編號,,就像一塊有數十只腳的集成電路,。任何一個人如果不看原理圖來檢修故障設備,會束手無策,,查找故障的速度會特別慢,。鑒于這種情況,我們根據電氣原理圖繪制一張表格,貼在設備的控制臺或控制柜上,,標明每個PLC輸入輸出端子編號與之相對應的電器符號,,中文名稱,即類似集成電路各管腳的功能說明,。有了這張輸入輸出表格,,對于了解操作過程或熟悉本設備梯形圖的電工就可以展開檢修了。但對于那些對操作過程不熟悉,,不會看梯形圖的電工來說,,就需要再繪制一張表格:PLC輸入輸出邏輯功能表。該表實際說明了大部分操作過程中輸入回路(觸發(fā)元件,、關聯元件)和輸出回路(執(zhí)行元件)的邏輯對應關系,。實踐證明如果你能熟練利用輸入輸出對應表及輸入輸出邏輯功能表,檢修電氣故障,,不帶圖紙,,也能輕松自如。
七,、通過程序邏輯推斷故障
現在工業(yè)上經常使用的PLC種類繁多,,對于低端的PLC而言,梯形圖指令大同小異,,對于中機,,如S7-300,許多程序是用語言表編的,。實用的梯形圖必須有中文符號注解,,否則閱讀很困難,看梯形圖前如能大概了解設備工藝或操作過程,,看起來比較容易,。若進行電氣故障分析,一般是應用反查法或稱反推法,,即根據輸入輸出對應表,,從故障點找到對應PLC的輸出繼電器,開始反查滿足其動作的邏輯關系,。經驗表明,,查到一處問題,故障基本可以排除,,因為設備同時發(fā)生兩起及兩起以上的故障點是不多的。
八,、充分合理利用軟,、硬件資源
1.不參與控制循環(huán)或在循環(huán)前已經投入的指令可不接入PLC;多重指令控制一個任務時,可先在PLC外部將它們并聯后再接入一個輸入點,;
2.盡量利用PLC內部功能軟元件,,充分調用中間狀態(tài),使程序具有完整連貫性,,易于開發(fā),。同時也減少硬件投入,降低了成本,;
3.條件允許的情況下更好獨立每一路輸出,,便于控制和檢查,也保護其它輸出回路,;當一個輸出點出現故障時只會導致相應輸出回路失控,;
4.輸出若為正/反向控制的負載,不僅要從PLC內部程序上聯鎖,,并且要在PLC外部采取措施,,防止負載在兩方向動作;
5.PLC緊急停止應使用外部開關切斷,,以確保安全,。
九、其他注意事項
1.不要將交流電源線接到輸入端子上,, 以免燒壞PLC,;接地端子應獨立接地,不與其它設備接地端串聯,,接地線截面積不小于2mm2,;
2.輔助電源功率較小,只能帶動小功率的設備(光電傳感器等),;
3.一些PLC有一定數量的占有點數(即空地址接線端子),,不要將線接上;
4.當PLC輸出電路中沒有保護時,,應在外部電路中串聯使用熔斷器等保護裝置,,防止負載短路造成損壞
連接I/O 并生成模板驅動
選中FbDrive功能塊左側個引腳PZDIn1,并將它連接到前邊定義的符號表地址EU1101_ZW1,,即是個狀態(tài)字,,當然也可以直接輸入地址,本例中地址為“IW512",,系統也會自動識別并顯示為對應的符號地址,,接下來一定要把報文的類型改為20, 如下圖。
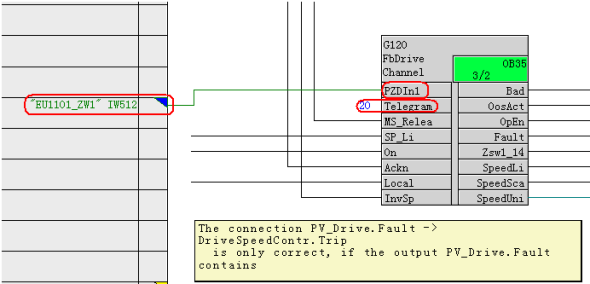
圖2-9 連接變頻器首地址并設置報文類型
保存編譯生成模板驅動后,,按F5刷新,,可以看到如下圖的CFC程序,,PZDIn1至PZDin6和PZDOut1、PDZOut2都會自動連線到相應的符號表地址,,并且Mode和DataXchg等管腳都自動生成連線,,如果發(fā)現MODE端沒有自動連線,請檢查硬件組態(tài)與要求的是否一致,。
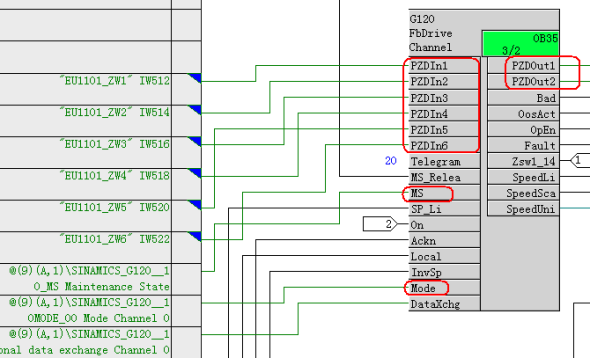
圖2-10 生成模板驅動后的FbDrive塊
2.4.3 FbDrive的常用引腳介紹
模板中的項目已經對FBDRIVE和MOTSPCL塊進行了相應的連接, 主要連接介紹如下:
- MotSpdCL塊的Fwd和Rev經過“OR"后連接到FbDrive的ON,, 用于馬達的啟停;
- MotSpdCL塊的P_Rst連接到FbDrive的Ackn,, 用于確認變頻器的故障,;
- MotSpdCL塊的SP_OUT輸出到FbDrive的SP_Li引腳,用于變頻器速度的給定,;
- MotSpdCL塊的LocalAct輸出到FbDrive的Local引腳,,當馬達切換至本地后,變頻器能夠將控制權釋放給本地操作,;
- SP_OUT塊的Bad信號輸出到MotSpdCL的CSF引腳,,當變頻器自身有問題時,馬達塊報“CSF"故障,;
- SP_OUT塊的Fault信號輸出到MotSpdCL的TRIP信號,, 當變頻器有故障時,馬達塊能停機并在之后確認故障,,注意需要在Trip引腳處取反,,因為Trip是=1時表示正常;
- Zsw1_14是變頻器個狀態(tài)字的bit14,,表示變頻器的正反轉反饋信號,,等于1時表示正轉,等于0時表示反轉,,通過與OP_EN(操作始能信號)相“與"后,, 做為正反轉的反饋信號,連接到MotSpdCL塊的FbkFwd和FbkRev,。
2.4.4 馬達塊和變頻器的速度匹配
在工業(yè)現場往往需要用到齒輪箱進行減速,,以獲得更大的扭矩,本文假定齒輪箱的減速比為10,,如下圖所示:
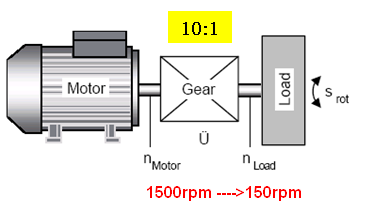
圖2-11 現場的應用模型
生產中用戶更關心的是實際設備轉速或者線速度,,如泵、導絲盤的軸速,,而不是電機的軸速,,如何實現畫面上直接設定設備轉速呢?
系統在Drive塊提供了SP_LiScale這個參數來進行量程的轉換,,它對應的是負載在變頻器輸出頻率時的負載速度,,馬達塊送來的給定值通過它折算后,,變成0-16384 的整數值給變頻器,反之亦然,,變頻器送來的第二個狀態(tài)字折算后送馬達塊顯示,下面具體介紹如下:
(1) 速度反饋:
SpeedLi是經過轉換后的速度反饋信號,,它的轉換公式是:
SpeedLi =(PZDIn2* SP_LiScale)/16384 ,,
(2) 速度給定:
FbDrive塊的SP_Li引腳接收馬達塊的給定信號,折算成對應的速度給定值后通過PZDOut2引腳輸出到變頻器,,公式如下:
PZDOut2=(SP_Li* SP_LiScale)/16384
在本例里變頻器頻率設置為50Hz,, 對應電機的軸頭速度為1500rpm,經Gear減速后得到負載的轉速為150rpm/min,, 在馬達的設定值面板里設定的是負載的轉速,,而不是馬達的速度,為此,,需要在FbDrive塊里設定好參數,,以保證負載的實際轉速與面板設定的相等。
在本例中,,齒輪箱的減速比為10,,變頻器側設置50Hz為頻率,對應的馬達轉速為1500rpm/Min,,經過齒輪箱減速后負載轉速為150rpm/min,, 所以SpeedLi應設置為150,如下圖所示:
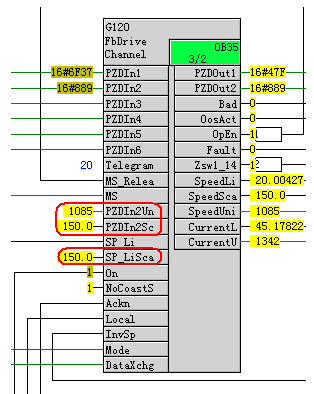
圖2-12 設置速度相關的參數
2.4.5 馬達塊里顯示變頻器的電流
在實際生產中,,除了監(jiān)視設備的轉速外,,通常還要監(jiān)視馬達的電流,FbDrive塊從變頻器取來電流值后,,運算后從引腳CurrentLi 輸出,,可以將它直接連接到MotSpdCL塊的UserAna1引腳上,注意這兩個引腳都是隱藏的,,需要用戶手動去掉Invisible的屬性,。
UserAna1引腳是馬達塊兩個輔助模擬量顯示之一,可以方便地在面板上顯示,,為了在面板上顯示出注釋,,需要對這個引腳的“Identifer"進行組態(tài), 例如:輸入 “current",,如下圖所示:

圖2-13 設置輔助模擬量顯示的標識
運行的效果如下所示:
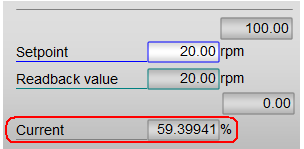
圖2-14 輔助模擬量顯示的效果
 您好, 歡迎來到化工儀器網
您好, 歡迎來到化工儀器網
