 您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)

西門子控制器6ES7315-2AH14-0AB0現(xiàn)貨供應(yīng)
西門子控制器6ES7315-2AH14-0AB0
設(shè)計CU310-2控制單元標(biāo)配有以下接頭和接口:現(xiàn)場總線接口CU310?2PN:1個PROFINET接口,,帶有PROFIdriveV4配置文件的2個端口(RJ45插座)CU310?2DP:1個采用PROFIdriveV4行規(guī)的PROFIBUS接口1個用于與DRIVE-CLiQ電機或其它DRIVE-CliQ設(shè)備(如編碼器單元或端子模塊)通信的DRIVE-CLiQ接口1編碼器分析功能,用于分析以下編碼器信號增量式編碼器TTL/HTLSSI編碼器,,無增量信號1個PE(保護用地線)連接1個電子裝置電源接口,通過24VDC電源連接器連接1點溫度傳感器輸入(KTY84?130或PTC)3個可設(shè)置參數(shù)的故障(可與固件V4.5或更高版本結(jié)合使用)數(shù)字量輸入(隔離)或6個可設(shè)置參數(shù)的數(shù)字量輸入(隔離。
除了極為靈活的定位功能,,由于其一體化的監(jiān)控和補償功能,,Epo還具有高度的用戶友好性和靈活性。各種不同的操作模式及其功能增強了靈活性和設(shè)備生產(chǎn)率,,例如,,通過“運行中快速"和無擾地校正運動控制。預(yù)組態(tài)的PROFIdrive定位框可供使用,,一旦選擇此定位框,,其可以自動建立到基本定位器的內(nèi)部“連接"。Epo基本定位器的功能借助以下基本組件實現(xiàn)閉環(huán)位置控制位置實值感測(包括低級別測量探頭評估和基準(zhǔn)標(biāo)記搜索)位置控制器(包括限值,、適配和預(yù)控計算)監(jiān)控功能(停止、定位和動態(tài)跟蹤誤差監(jiān)控,,和凸輪信號)機械系統(tǒng)反向間隙補償模數(shù)偏移量極限值速度/加速度/延遲/沖擊限制軟件限位開關(guān)(通過位置設(shè)定點評估進行行程限制)停止凸輪(使用硬限位開關(guān)分析進行移動范圍限制)參考或調(diào)整設(shè)定參考點(對于處于靜止的軸)搜索基準(zhǔn)(單個模式包括反向能,、自動換向、歸位至“輸出凸輪和編碼器零點標(biāo)號"或只是“編碼器零點標(biāo)號"或“外部零點標(biāo)號(BERO)")捕捉參考(借助于測量輸入分,。
CU310?2控制單元需要裝有V4.4版或更高版本的固件的CF卡,。CU310?2PN控制單元使用PROFINETIO和PROFIdriveV4配置文件與更別的控制系統(tǒng)通信。帶有CU310?2PN的SINAMICSS120驅(qū)動系統(tǒng)假設(shè)PROFINETIO設(shè)備的功能,,可執(zhí)行下列功能:PROFINETIO設(shè)備100Mbit/s全雙工通訊支持實時PROFINETIO:RT(實時)IRT(等時同步實時),,*小發(fā)隨著人力資源的匱乏,非標(biāo)自動化機械在未來的市場將不斷擴大,,普及,。相應(yīng)的從事行業(yè)內(nèi)的人才也將有大的需求。設(shè)計是理論知識,,生產(chǎn)上不要求多美觀,,實用就好,宗旨是簡單,,,,經(jīng)濟,實用,。作為的設(shè)計師,,對機械方案的評估要有*的判斷能。
除驅(qū)動對象外,,還可在這些控制單元上實現(xiàn)工藝對象,。可將這些對象進行分組以形成工藝功能包,,并提供擴展的運動控制功能(如同步操作,、凸、路徑插補等)或工藝功能(如凸輪控制器、溫度或壓力控制),。SIMOTIOND中集成有符合IEC61131-3的PLC,,這意味著該系統(tǒng)不僅能夠控制運動序列,而且還可控制包括HMI及I/O的整臺機器,。的開環(huán)和閉環(huán)控制功能與驅(qū)動對象相關(guān)的輸入和輸出變量的時間特性可通過集成的軌跡功能進行測量,,并通過STARTER調(diào)試工具進行顯示。軌跡可同時記錄*多4個信號,。一個記錄可通過自由選擇邊界條件來觸發(fā),,例如,通過一個輸入或輸出變量的值來觸發(fā),?;径ㄎ黄鞴δ苣K(EPos)基本定位器“Epos"可作為一個另外激活的功能模塊在所有SINAMICSS120控制單元上調(diào) 基本定位器可用于解決基本運動控制任務(wù),無需使用一個外部控制器,。集成功能,,用于帶電機編碼器或機器編碼器的直線和旋轉(zhuǎn)軸的及相對定位。SINAMICSS120驅(qū)動系統(tǒng)中的Epo基本定位器提供了強大,、精準(zhǔn)的定位功能,。由于其靈活性和自適應(yīng)性,基本定位器可用于一系列定位任務(wù)中,。這些功能無論是在調(diào)試還是操作時都易于處理,,并且綜合監(jiān)控功能十。在不使用外部位置控制器的情況下,,可以實現(xiàn)許多應(yīng)用,。Epo基本定位器用于在/相對定位條件下定位帶有旋轉(zhuǎn)以及線性電機編碼器或機器編碼器(間接或直接測量系統(tǒng))的線性或旋轉(zhuǎn)軸(模數(shù))。Epo是一個功能模塊,,其可在伺服控制或向量控制中激活,。用戶友好的組態(tài)和調(diào)試,包括控制面板(通過PC操作)和帶有STARTER調(diào)試工具的診斷功,。
理的結(jié)構(gòu)型式PLC主要有整體式和模塊式兩種結(jié)構(gòu)型式,。整體式PLC的每一個I/O點的平均價格比模塊式的便宜,且體積相對較小,一般用于系統(tǒng)工藝過程較為固定的小型控制系統(tǒng)中;而模塊式PLC的功能擴展靈活方便,在I/O點數(shù),、輸入點數(shù)與輸出點數(shù)的比例,、I/O模塊的種類等方面選擇余地大,且維修方便,一般于較復(fù)雜的控制系統(tǒng)。安裝方式的選擇PLC系統(tǒng)的安裝方式分為集中式,、遠(yuǎn)程I/O式以及多臺PLC聯(lián)網(wǎng)的分布式,。集中式不需要設(shè)置驅(qū)動遠(yuǎn)程I/O硬件,系統(tǒng)反應(yīng)快、成本低,;遠(yuǎn)程I/O式適用于大型系統(tǒng),系統(tǒng)的裝置分布范圍很廣,遠(yuǎn)程I/O可以分散安裝在現(xiàn)場裝置附近,連線短,但需要增設(shè)驅(qū)動器和遠(yuǎn)程I/O電源,;多臺PLC聯(lián)網(wǎng)的分布式適用于多臺設(shè)備分別獨立控制,又要相互聯(lián)系的場合,可以選用小型PLC,但必須要附加通訊模,。
相應(yīng)的功能要求一般小型(低檔)PLC具有邏輯運算、定時,、計數(shù)等功能,對于只需要開關(guān)量控制的設(shè)備都可滿足,。對于以開關(guān)量控制為主,帶少量模擬量控制的系統(tǒng),可選用能帶A/D和D/A轉(zhuǎn)換單元,具有加減算術(shù)運算、數(shù)據(jù)傳送功能的增強型低檔PLC,。對于控制較復(fù)雜,要求實現(xiàn)PID運算,、閉環(huán)控制、通信聯(lián)網(wǎng)等功能,可視控制規(guī)模大小及復(fù)雜程度,選用中檔或高檔PLC,。但是中,、高檔PLC價格較貴,一般用于大規(guī)模過程控制和集散控制系統(tǒng)等場合。響應(yīng)速度要求PLC是為工業(yè)自動化設(shè)計的通用控制器,不同檔次PLC的響應(yīng)速度一般都能滿足其應(yīng)用范圍內(nèi)的需要,。如果要跨范圍使用PLC,或者某些功能或信號有特殊的速度要求時,則應(yīng)該慎重考慮PLC的響應(yīng)速度,可選用具有高速I/O處理功能的PLC,或選用具有快速響應(yīng)模塊和中斷輸入模塊的PLC
3. 在WinLC RTX中新建Data Type(UDT1),,參照上述WinCC幫助文件中數(shù)據(jù)塊的架構(gòu)和參數(shù)介紹,定義過程變量的結(jié)構(gòu),,如圖5所示,。
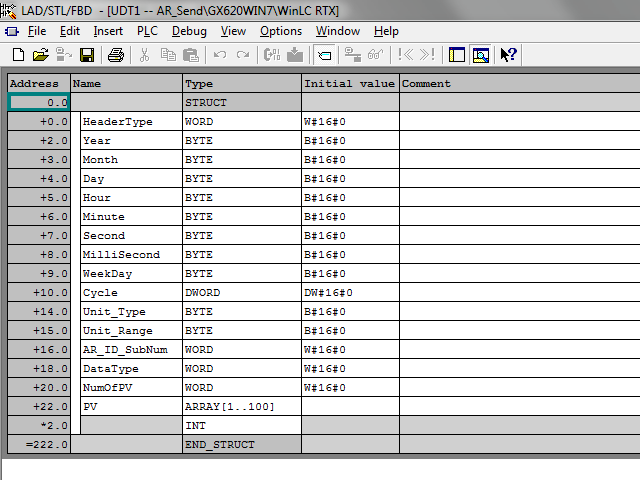
圖5
4. 在WinLC RTX中新建Data Block(DB1),定義數(shù)組,,類型選擇UDT1,如圖6所示,。
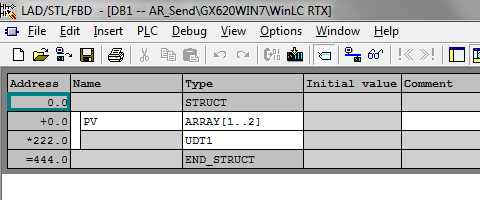
圖6
5. 參照上述WinCC幫助文件中AR_SEND的變量屬性,,為DB1的數(shù)組PV分配如下相應(yīng)的初始值:
PV(1).HeaderType=9
PV(1).Cycle=10
PV(1).Unit_Type=1
PV(1).Unit_Range=3
PV(1).AR_ID_SubNum=1
PV(1).DataType=2
PV(1).NumOfPV=100
PV(2)的初始值和PV(1)基本相同,注意PV(1).AR_ID_SubNum=2,。
6. 在WinLC RTX中新建Function Block(FB1),,在Interface-IN中新建輸入?yún)?shù)AR_Send,選擇Data Type為AR_Send,,調(diào)用SFB37(AR_SEND)發(fā)送DB1,,如圖7所示。
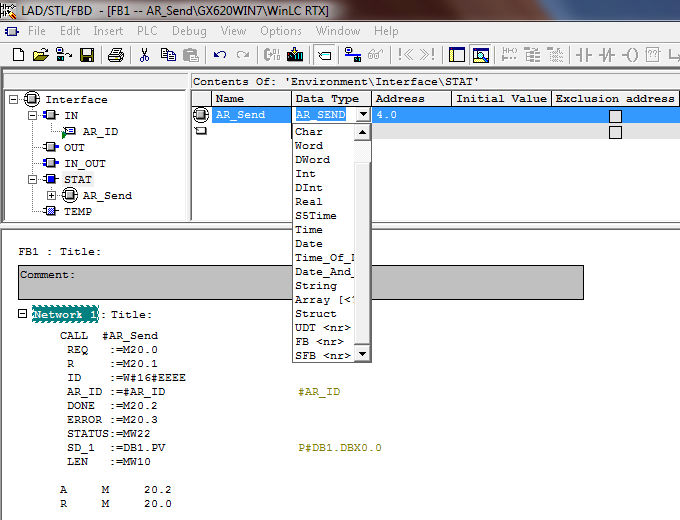
圖7
7. 在WinLC RTX中新建Fucntion(FC1),,調(diào)用FB1,,并調(diào)用SFC1(READ_CLK)讀取當(dāng)前系統(tǒng)時間并寫入DB1,如圖8所示,。
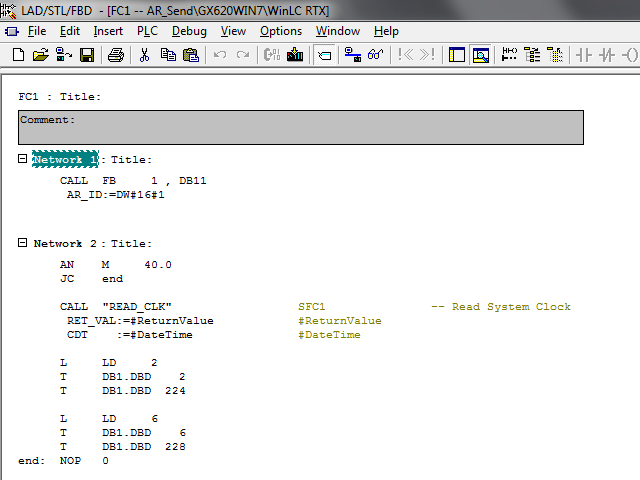
圖8
8. 在WinLC RTX中新建Function(FC3),,SFB37(SAR_Send)發(fā)送的數(shù)據(jù)包長度,如圖9所示,。
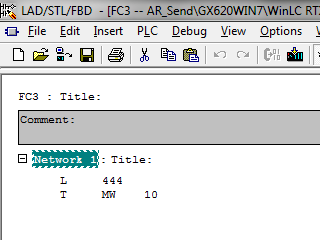
圖9
9. 在WinLC RTX中新建Organization Block(OB100),,調(diào)用FC3。
10. 在WinLC RTX中的OB1中調(diào)用FC1,。
11. 選擇菜單Options-'Compile Multiple OSs' Wizard-Start,,編譯AS-OS,如圖10、圖11所示,。
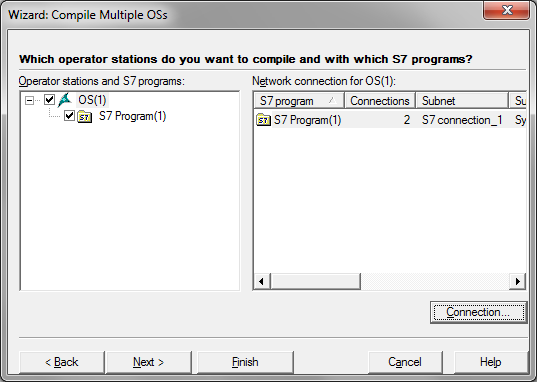
圖10
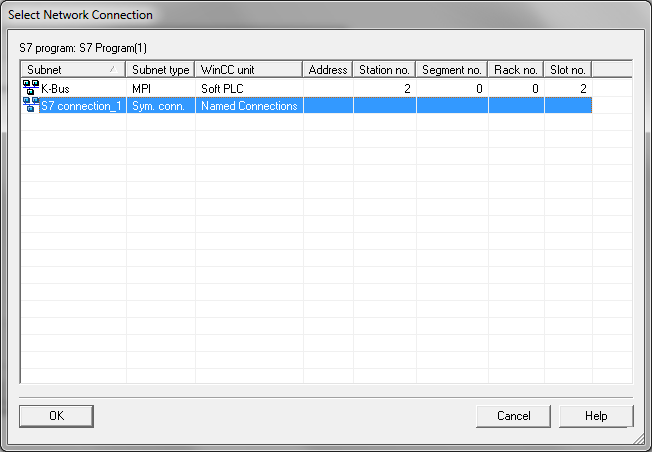
圖11