您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)

6ES7870-1AA01-0YA0現(xiàn)貨供應
6ES7870-1AA01-0YA0
系統(tǒng)中的液位開關讓操作者了解攪拌桶內(nèi)的液位情況,并且提供輸送泵和攪拌電機之間的連鎖關系,。
一,、線性化編程
線性化編程就是將用戶程序連續(xù)放置在一個指令塊內(nèi),,即一個簡單的程序塊內(nèi)包含系統(tǒng)的所有指令。線性化編程不帶分支,,通常是OB1程序按順序執(zhí)行每一條指令,,軟件管理的功能相對簡單。
二,、分部編程
分部式編程是把一項控制任務分成若干個獨立的塊,,每個塊用于控制一套設備或一系列工作的邏輯指令,而這些塊的運行靠組織塊OB內(nèi)指令來調(diào)用,。
三,、結(jié)構(gòu)化編程
結(jié)構(gòu)化程序把過程要求的類似或相關的功能進行分類,并試圖提供可以用于幾個任務的通用解決方案,。向指令塊提供有關信息(以參數(shù)形式),,結(jié)構(gòu)化程序能夠重復利用這些通用模塊。
控制軟件分為五個功能塊:
FC10 功能塊用于控制成分A的供料泵,;
FC20 功能塊用于控制成分B的供料泵,;
FC30 功能塊用于控制攪拌馬達;
FC40 功能塊用于控制排料電磁閥,;
FC50 功能塊用于控制操作站上的指示燈
輸入端:
①EN:該輸入端是MC_Reset指令的使能端,。
②Axis:軸名稱。
③Execute:MC_Reset指令的啟動位,,用上升沿觸發(fā),。
④Restart:
Restart = 0:用來確認錯誤。
Restart = 1:將軸的組態(tài)從裝載存儲器下載到工作存儲器(只有在禁用軸的時候才能執(zhí)行該命令),。
輸出端:除了Done指令,,其他輸出管腳同MC_Power指令,這里不再贅述,。
⑥D(zhuǎn)one:表示軸的錯誤已確認,。
SINAMICSS120功率范圍為0.12-4500kW,具有各種結(jié)構(gòu)形式和冷卻方式,,SINAMICSS120–亮點簡介·伺服驅(qū)動器是模塊化系統(tǒng)和機器設計的理想基礎·的系統(tǒng)體系結(jié)構(gòu)和數(shù)字通信功能·具有多種控制模式和與驅(qū)動器特定相關的工藝功能·內(nèi)置有功能·通,。
S7-300 具有不同的通信接口: 連接 AS-Interface、PROFIBUS 和 PROFINET/工業(yè)以太網(wǎng)總線系統(tǒng)的通信處理器,。 用于點到點連接的通信處理器 多點接口 (MPI), 集成在 CPU 中,; 是一種經(jīng)濟有效的方案,可以同時連接編程器/PC,、人機界面系統(tǒng)和其它的 SIMATIC S7/C7 自動化系統(tǒng),。 PROFIBUS DP進行過程通信 SIMATIC S7-300 通過通信處理器或通過配備集成 PROFIBUS DP 接口的 CPU 連接到 PROFIBUS DP 總線系統(tǒng),。通過帶有 PROFIBUS DP 主站/從站接口的 CPU,可構(gòu)建一個高速的分布式自動化系統(tǒng),并且使得操作大大簡化
要將SIMATIC MV320和SIMATIC MV340 手持讀碼器連接到串口的通信處理器(CP340 或 CP341),,必須使用帶有 RS-232 接口的手持讀碼系統(tǒng),。 CPU,串口 CP 及手持讀碼系統(tǒng)之間的通信是通過串口 CP 和 ASCII 協(xié)議的功能塊執(zhí)行的,。
以下描述了如何參數(shù)化串口 CP 以及在 S7-300 CPU 用戶程序中調(diào)用哪些功能塊來讀取和評估手持讀碼系統(tǒng)的數(shù)據(jù),。
要求
下面的組態(tài)軟件在參數(shù)化串口 CP340 或 CP341 時是必需的:
STEP 7 V5.3 或更高版本
PtP 參數(shù):條目 ID 27013524 包含新版本組態(tài)軟件的 PtP 參數(shù)的下載。
參數(shù)化串口 CP
在 SIMATIC Manager 中打開 SIMATIC S7-300 站的硬件組態(tài),。在硬件目錄中選擇串口 CP,,比如 CP341。拖動并放置其到 S7-300 站機架的一個插槽中,。
雙擊 CP341 來打開 CP341 的屬性對話框,。
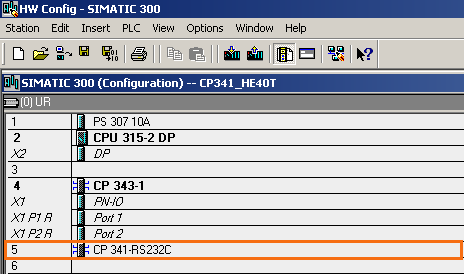
圖 01
在 CP341 的屬性對話框中,切換到 'General' 選項卡,。點擊 'Parameter...' 圖標后開啟 CP341 的 PtP Param 組態(tài)軟件,。

圖 02
選擇 ASCII 協(xié)議。然后雙擊代表協(xié)議的信封圖標來打開 'Protocol' 對話框,,進行特定協(xié)議的設置,。

圖 03
在 'Protocol' 對話框中選擇 'ASCII' 選項卡。設置通信速率和字符幀以使其與手持讀碼器的參數(shù)匹配,。例如:
波特率:9600 bits/s
數(shù)據(jù)位:8
停止位: 1
校驗: 無
點擊 'OK' 按鈕來應用設置及完成對 CP341 的參數(shù)化,。
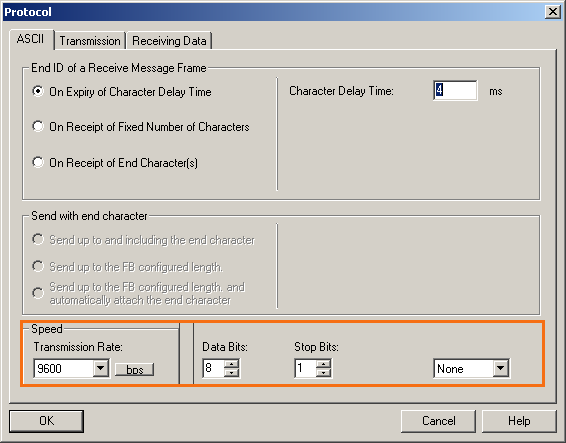
圖 04
保存并編譯 S7-300 站的配置。然后將配置下載到 S7-300 CPU,。
關閉硬件組態(tài),。
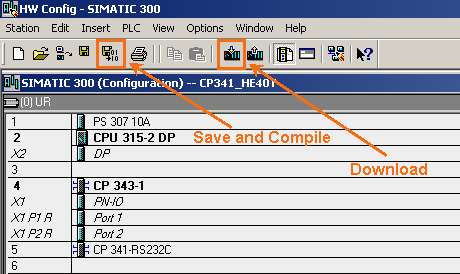
圖 05
在 S7-300 CPU 的用戶程序中調(diào)用功能塊
為了通過 S7-300 CPU 的 CP341 接收來自手持讀碼系統(tǒng)的數(shù)據(jù),在 S7-300 CPU 的用戶程序中調(diào)用功能塊 FB7 'P_RCV_RK',。
FB7 'P_RCV_RK' 位于庫文件 'CP PtP' 下的文件夾 'CP 341 > Blocks' 中,。
在 SIMATIC Manager 中通過菜單 'File > Open' 打開 'CP PtP' 庫。
'Open Project' 對話框中選擇 'Libraries' 選項卡,。
選擇 'CP PtP' 庫并點擊 'OK' 按鈕,。

圖 06
從庫中復制 FB7 'P_RCV_RK' 并將其插入到 S7 程序的塊中。
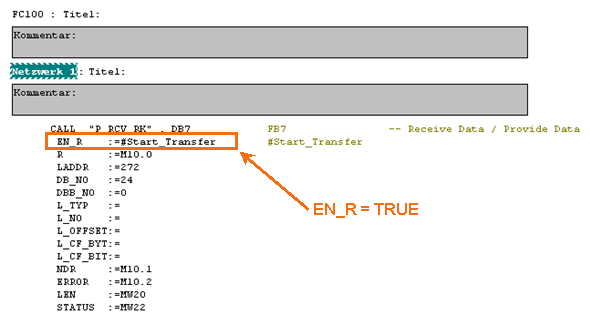
本例程是在 FC100 中調(diào)用 FB7 'P_RCV_RK',。FC100 是在OB1 中被循環(huán)調(diào)用的。
將塊的 EN_R 輸入端置為 'TRUE' 以便 CP341 可以在任意時刻接收到數(shù)據(jù),。
手持讀碼系統(tǒng)接收到的數(shù)據(jù)被存儲在數(shù)據(jù)塊 DB24 中,。
輸出端 NDR,ERROR 與 STATUS 是工作評估所需要的,,并且在同一周期內(nèi)是有效的,。
輸出端 'NDR' 用于顯示新的數(shù)據(jù)被接收并存儲在 DB24 中,。如果沒有成功完成讀取作業(yè),那么輸出端 ERROR 被置 1 ,,同時輸出端 STATUS 輸出錯誤信息,。