 您好, 歡迎來(lái)到化工儀器網(wǎng)
您好, 歡迎來(lái)到化工儀器網(wǎng)

產(chǎn)品分類品牌分類
-
西門(mén)子PLC模塊 西門(mén)子CPU 西門(mén)子DP電纜 西門(mén)子模塊 西門(mén)子變頻器 西門(mén)子電源 西門(mén)子連接器 西門(mén)子軟啟動(dòng) 西門(mén)子軸卡 西門(mén)子數(shù)控系統(tǒng) 西門(mén)子工控機(jī) 西門(mén)子PLC 西門(mén)子觸摸屏 西門(mén)子交換機(jī) 西門(mén)子導(dǎo)軌 西門(mén)子驅(qū)動(dòng)器 西門(mén)子NCU備件 ET200 DP接頭 S7-1500 S7-400 S7-300 1200 200SMART 200CN PLC 電線電纜
岳陽(yáng)西門(mén)子PLC代理商
岳陽(yáng)西門(mén)子PLC代理商
S7-300啟動(dòng)時(shí)的組織塊OB100在CPU啟動(dòng)中只執(zhí)行一次的特性,,對(duì)增塑劑伺服電機(jī)的控制方式依據(jù)機(jī)組不同的啟動(dòng)狀態(tài)采取了不同響應(yīng)曲線下的控制方法。具體來(lái)說(shuō),,在CPU啟動(dòng)時(shí)(此時(shí)增塑劑存儲(chǔ)量必定為零),,通過(guò)啟動(dòng)組織塊OB100中送出高速運(yùn)轉(zhuǎn)命令至增塑劑伺服電機(jī),使控制曲線成為欠阻尼響應(yīng)狀態(tài)以實(shí)現(xiàn)對(duì)存儲(chǔ)器中增塑劑的快速積累,。而在非CPU啟動(dòng)狀態(tài),,控制增塑劑伺服電機(jī)的FC功能塊將送出普通速度命令,使控制曲線成為比較接近臨界阻尼的過(guò)阻尼響應(yīng)狀態(tài),?!?nbsp;
新的設(shè)計(jì)*避免了CPU重啟時(shí)帶來(lái)的增塑劑積累過(guò)慢的問(wèn)題、減少了廢品數(shù)量,,因此這樣的設(shè)計(jì)不會(huì)影響正常生產(chǎn)狀況時(shí)增塑劑含量的穩(wěn)定性,。
(2) 對(duì)濾棒剔除支數(shù)的計(jì)算策略
在纖維濾棒成型機(jī)的生產(chǎn)中,,為保證濾棒質(zhì)量,,每當(dāng)速度低于一定的設(shè)定值時(shí),機(jī)組就會(huì)剔除此時(shí)的濾棒,。此時(shí)機(jī)組的速度是不斷變化的,,按通常方式無(wú)法計(jì)算出具體的剔除支數(shù)。這對(duì)統(tǒng)計(jì)生產(chǎn)效率帶來(lái)了相當(dāng)?shù)睦щy,?! ?nbsp;
筆者可以得到動(dòng)態(tài)的車速反饋,但這條反饋曲線是不斷波動(dòng)和變化的非線性曲線,。對(duì)于非線性曲線,,數(shù)學(xué)上只能夠采用面積積分求解的計(jì)算方法。對(duì)于此項(xiàng)目就是要求給出一定時(shí)間內(nèi)主電機(jī)的圓周行程,,即機(jī)組一段時(shí)間內(nèi)所生產(chǎn)的濾棒長(zhǎng)度,。
從這一角度出發(fā),,筆者考慮采用了對(duì)車速進(jìn)行模擬積分的計(jì)算方法,,即從積分的基本定義出發(fā),求出剔除時(shí)間內(nèi)的濾棒生產(chǎn)長(zhǎng)度L=Σ(Δv*Δt),,再除以單個(gè)濾棒長(zhǎng)度得剔除支數(shù)的計(jì)算方法,。
按照積分的定義要求,,積分求解是在一定條件下才能夠成立,。這個(gè)條件就是Δt要足夠的小即Δt→0,。在實(shí)際過(guò)程中,近似認(rèn)為Δt=20ms時(shí)可以滿足條件,。此時(shí),,計(jì)算得出的濾棒支數(shù)與實(shí)際濾棒支數(shù)的誤差在±3支以內(nèi)。在精度上,,以高生產(chǎn)速度3300支/分鐘計(jì)(此時(shí)濾棒長(zhǎng)度為120mm),,±3支的精度是*可以滿足精度要求。所以筆者認(rèn)為只要將Δt控制在20ms時(shí)就可以滿足積分求解的條件,?! ?nbsp;
原系統(tǒng)的PLC掃描一周的時(shí)間高達(dá)幾十毫秒,顯然不滿足要求,。而此項(xiàng)目采用的S7-315-2DP,,其單指令掃描周期為10μs級(jí)、整個(gè)掃描周期被縮短為7~8ms,,這樣就滿足了積分計(jì)算的要求,。
(3) 對(duì)拼接紙圈的控制策略
改造之前,,纖維濾棒成型機(jī)執(zhí)行的是降低運(yùn)行速度再進(jìn)行紙圈拼接,。這種降速接紙方式對(duì)實(shí)際生產(chǎn)是不利的:每次降速都會(huì)造成車速的大幅度變化,影響了濾棒的質(zhì)量,。為消除這種影響,,筆者采用了不降速拼接的方法?! ?nbsp;
不降速拼接和降速拼接并沒(méi)有本質(zhì)的區(qū)別:兩者采用的接紙動(dòng)作一樣,,兩者只是在機(jī)械結(jié)構(gòu)和電氣控制元件上有區(qū)別。接紙速度的提高勢(shì)必使紙圈的靜摩擦力同等上升,。如果轉(zhuǎn)速斜坡率過(guò)高會(huì)產(chǎn)生很大的靜摩擦力,,該力會(huì)撕裂紙圈。如果轉(zhuǎn)速斜坡率過(guò)低,,拼接時(shí)的紙圈浪費(fèi)將增加,。
為避免煩瑣,,該項(xiàng)目放棄變頻器對(duì)接紙電機(jī)轉(zhuǎn)速的分段控制,。為求出靜摩擦力和紙圈長(zhǎng)度兩者之間的優(yōu)控制,筆者對(duì)接紙電機(jī)上升時(shí)間采取優(yōu)篩選法,。通過(guò)優(yōu)篩選法得到的電機(jī)上升時(shí)間大約為3.4s,。考慮到生產(chǎn)情況及電磁閥等器件的時(shí)滯效應(yīng),將這一時(shí)間進(jìn)一步放寬為3.5s,。
3 程序設(shè)計(jì)
程序設(shè)計(jì)采用了結(jié)構(gòu)化設(shè)計(jì),,將所需實(shí)現(xiàn)的各主要功能編制成為S7-300中的用戶功能塊(FC塊),,在主程序循環(huán)模塊(組織塊OB1)中調(diào)用這些已經(jīng)編制好的子程序?! ?nbsp;
程序設(shè)計(jì)分成硬件設(shè)計(jì)和軟件設(shè)計(jì)兩方面,。在硬件方面針對(duì)系統(tǒng)要求進(jìn)行設(shè)計(jì),在軟件方面則按需要編制了速度計(jì)算模塊,、報(bào)警和故障模塊,、伺服電機(jī)執(zhí)行模塊、增塑劑執(zhí)行模塊,、生產(chǎn)統(tǒng)計(jì)計(jì)算模塊等FC塊和預(yù)設(shè),、保持系統(tǒng)及生產(chǎn)數(shù)據(jù)的數(shù)據(jù)塊DB塊?! ?nbsp;
(1) 硬件設(shè)計(jì)與組態(tài)
本系統(tǒng)在S7-300的硬件方面采用了1塊PS307 5A電源模塊,,1塊CPU-315-2DP,4塊24V/0V SM321數(shù)字量輸入模塊,,3塊24V/0.5A SM322數(shù)字量輸出模塊,,1塊FM352-2高速計(jì)數(shù)模塊,2塊SM331模擬量輸入模塊,,1塊SM332模擬量輸出模塊以及用于DP總線通訊的IM153-1通訊模塊1塊,。
S7-300外圍設(shè)備為5個(gè)伺服電機(jī)的DP通訊端,?! ?nbsp;
對(duì)上述硬件按要求進(jìn)行組態(tài),分別占據(jù)Profibus-DP通訊端的2,、3~7和9號(hào)站,,具體硬件組態(tài)如圖3所示?! ?nbsp;
(2) 軟件設(shè)計(jì)
由于編制的用戶功能模塊很多,,限于篇幅,在這里不能一一作出介紹,。以下介紹幾個(gè)比較重要的用戶功能模塊,。
① 數(shù)據(jù)塊組(Group of Data-Blocks)
數(shù)據(jù)塊組由一系列數(shù)據(jù)塊組成,。這些數(shù)據(jù)塊除了一部分是S7-300程序中FB(功能塊的一種)所要求的之外,,其他的數(shù)據(jù)塊都是用戶自定義的。這是因?yàn)樯a(chǎn)中機(jī)組的一些系統(tǒng)和生產(chǎn)數(shù)據(jù)必須被預(yù)設(shè)或保存。由于S7-300內(nèi)部保持型M區(qū)的保存數(shù)量相對(duì)不足,,例如:CPU315-2DP中整個(gè)可使用的M區(qū)的容量?jī)H1024Bytes,。同時(shí),程序運(yùn)行中所大量使用中間參數(shù)也需要不可重復(fù)的地址空間,,所以將大部分的數(shù)據(jù)(特別是在觸摸屏上顯示的參數(shù))編制成保持型DB塊,。
② 速度計(jì)算模塊(FC for Speed)
雖然機(jī)組的高生產(chǎn)能力為400m/min,,但是在許多煙廠并不需要一直運(yùn)行在高速度下,。該項(xiàng)目提供可從觸摸屏上選擇5檔不同的車速系統(tǒng),本模塊就是將無(wú)序設(shè)定的參數(shù)按由大到小的方式降序排列,,并在觸摸屏上以這種次序顯示出來(lái),。在程序內(nèi)部,本模塊會(huì)進(jìn)行數(shù)據(jù)轉(zhuǎn)換并將轉(zhuǎn)換后的數(shù)據(jù)提供給伺服電機(jī)執(zhí)行模塊 ③ 伺服電機(jī)執(zhí)行模塊(FC for Servo-Motor)
在得到速度計(jì)算模塊和一些其他模塊(如開(kāi)松輥參數(shù)模塊等)的數(shù)據(jù)后,,伺服電機(jī)執(zhí)行模塊會(huì)向?qū)?yīng)的伺服控制塊發(fā)出指令和接收伺服電機(jī)狀態(tài)參數(shù),。指令包括伺服控制字、車速命令,、快停命令,、上升時(shí)間和下降時(shí)間等,狀態(tài)參數(shù)包括電機(jī)當(dāng)前運(yùn)行速度等,。這些指令和參數(shù)通過(guò)過(guò)程通道和參數(shù)通道兩種方式控制“一主三從"共計(jì)4個(gè)伺服電機(jī),。
④ 增塑劑執(zhí)行模塊(FC for Glyceride-Motor)
控制增塑劑的伺服電機(jī)是相對(duì)獨(dú)立于其他伺服電機(jī),,控制結(jié)構(gòu)類似于主電機(jī),。增塑劑執(zhí)行模塊通過(guò)內(nèi)部計(jì)算得到增塑劑伺服電機(jī)的運(yùn)行速度。同時(shí),,由于存在增塑劑軟件補(bǔ)償?shù)膯?wèn)題,,所以高速和低速運(yùn)行的參數(shù)為不同的兩組參數(shù),程序按設(shè)置發(fā)送,。這是這個(gè)模塊區(qū)別于伺服電機(jī)執(zhí)行模塊的地方,。
⑤ 生產(chǎn)統(tǒng)計(jì)計(jì)算模塊(FC for Statistics)
由于要在生產(chǎn)中向工作人員提供實(shí)時(shí)的生產(chǎn)狀況,,所以編制了這個(gè)功能塊,,這樣就可以通過(guò)多次反復(fù)調(diào)用FC205來(lái)得到各班次的生產(chǎn)狀況。這樣節(jié)約了編程的時(shí)間和工作量,,也同時(shí)減少了程序編寫(xiě)出錯(cuò)的隱患,。
PROFIBUS現(xiàn)場(chǎng)總線技術(shù)是隨全數(shù)字信號(hào)系統(tǒng)的發(fā)展而產(chǎn)生的,是由德國(guó)組織開(kāi)發(fā)的工業(yè)現(xiàn)場(chǎng)總線協(xié)議標(biāo)準(zhǔn)——PROFIBUS現(xiàn)場(chǎng)總線標(biāo)準(zhǔn)(DIN19254),。
PROFIBUS是近年來(lái)上為流行的現(xiàn)場(chǎng)總線,,也是目前數(shù)據(jù)傳輸率快的一種現(xiàn)場(chǎng)總線(傳輸率可達(dá)12M波特),因此在很多領(lǐng)域內(nèi)廣泛應(yīng)用。它是不依賴于生產(chǎn)廠家的,、開(kāi)放式的現(xiàn)場(chǎng)總線,,各種各樣的自動(dòng)化設(shè)備均可通過(guò)同樣的接換信息。
PROFIBUS-DP(DistributedI/OS-分布系統(tǒng))是一種經(jīng)過(guò)優(yōu)化的模塊,,有比較高的數(shù)據(jù)傳輸率,,適用于系統(tǒng)和外部設(shè)備之間的通信,遠(yuǎn)程I/O系統(tǒng)尤為適合,。它允許高速度周期性的小批量數(shù)據(jù)通信,適用于對(duì)時(shí)間要求比較高的自動(dòng)化場(chǎng)合,。
筆者將以S7-400HPLC為例,,結(jié)合其在鐵路信號(hào)中的應(yīng)用,探討實(shí)現(xiàn)PROFIBUS-DP/MPI網(wǎng)絡(luò)系統(tǒng)原理和方法,。
PROFIBUS-DP/MPI網(wǎng)的性質(zhì)和特點(diǎn)
PROFIBUS-DP適用于現(xiàn)場(chǎng)層的高速數(shù)據(jù)傳送,。主站周期地讀取從站的輸入信息并周期地向從站發(fā)送輸出信息。除周期性用戶數(shù)據(jù)傳輸外,,PROFIBUS-DP還提供智能化現(xiàn)場(chǎng)設(shè)備所需的非周期性通信以進(jìn)行組態(tài),、診斷和報(bào)警處理等。
DP網(wǎng)的協(xié)議結(jié)構(gòu)
PROFIBUS定義了各種數(shù)據(jù)設(shè)備連接的串行現(xiàn)場(chǎng)總線的技術(shù)和功能特性,,這些數(shù)據(jù)設(shè)備可以從底層(如傳感器,、執(zhí)行器層)到中間層(如車間層)廣泛分布。
PROFIBUS連接的系統(tǒng)由主站和從站組成,。主站一般要復(fù)雜些,;從站為簡(jiǎn)單的外圍設(shè)備,典型的從站為傳感器,、執(zhí)行器及變送器,,它們沒(méi)有總線控制權(quán),僅對(duì)接收到的信息給予回答,,或者主站發(fā)出請(qǐng)求時(shí)回送給主站相應(yīng)信息,。因此,從站只需要協(xié)議的一小部分,,實(shí)現(xiàn)起來(lái)非常方便,。
PROFIBUS協(xié)議結(jié)構(gòu)是根據(jù)ISO7498標(biāo)準(zhǔn),以開(kāi)放式系統(tǒng)互聯(lián)網(wǎng)絡(luò)(Open System Interconnection,,OSI)作為參考模型,,該模型共有7層,PROFIBUS-DP定義了其中的,、二層和用戶接口,。第3到7層未加描述。
圖1為ISO/OSI參考模型與PROFIBUS體系結(jié)構(gòu)比較。用戶接口規(guī)定了用戶及系統(tǒng)以及不同設(shè)備可調(diào)用的應(yīng)用功能,,并詳細(xì)說(shuō)明了各種不同PROFIBUS-DP設(shè)備的設(shè)備行為,。物理層采用EIARS-485雙絞線或光纖,連接器采用RS-485標(biāo)準(zhǔn)的9針D型插座,。數(shù)據(jù)鏈路層提供了介質(zhì)存取控制功能,、數(shù)據(jù)的完整性檢查以及傳輸執(zhí)行的協(xié)議,在PROFIBUS中稱第2層為現(xiàn)場(chǎng)總線數(shù)據(jù)鏈路(FDL)(包括介質(zhì)訪問(wèn)存取控制(MAC)子層,、現(xiàn)場(chǎng)總線鏈路控制(FLC)子層,、現(xiàn)場(chǎng)總線管理(FMA1/2)子層),采用混合介質(zhì)存取協(xié)議,,對(duì)應(yīng)于DIN(E)19245,,支持單主或多主系統(tǒng),主或從設(shè)備,,大站數(shù)為126,。它包括主站之間的數(shù)據(jù)傳輸?shù)牧钆骗h(huán)方式和從站之間的主-從方式。PROFIBUS第7層包括底層接口(LLI),、現(xiàn)場(chǎng)總線信息規(guī)范(FMS)和現(xiàn)場(chǎng)總線管理(FMA7),。
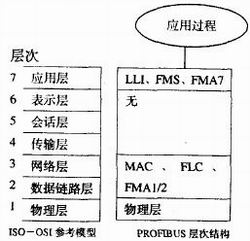
圖1 ISO/OSI參考模型與PROFIBUS體系結(jié)構(gòu)比較
圖2為PROFIBUS-DP數(shù)據(jù)傳輸示意圖,即主站發(fā)送請(qǐng)求,,訪問(wèn)DP從站,,其中包括幀格式;從站收到請(qǐng)求信息后,,立即響應(yīng)主站,,并回送響應(yīng)幀。
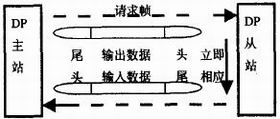
圖2 PROFIBUS-DP用戶數(shù)據(jù)傳輸
USS 通信功能塊與變頻器的控制關(guān)系
USS_DRV功能塊通過(guò)USS_DRV_DB數(shù)據(jù)塊實(shí)現(xiàn)與USS_PORT功能塊的數(shù)據(jù)接收與傳送,,而USS_PORT功能塊是S7-1200 PLC CM1241 RS485模塊與變頻器之間的通信接口,。USS_RPM功能塊和USS_WPM功能塊與變頻器的通信與USS_DRV功能塊的通信方式是相同的。
每個(gè)S7-1200 CPU多可帶3個(gè)通信模塊,,而每個(gè)CM1241 RS485通信模塊多支持16個(gè)變頻器,。因此用戶在一個(gè)S7-1200 CPU中多可建立3個(gè)USS網(wǎng)絡(luò),而每個(gè)USS網(wǎng)絡(luò)多支持16個(gè)變頻器,,總共多支持48個(gè)USS變頻器,。
5. 2 S7 1200 PLC進(jìn)行USS通信的編程
1.USS通信接口參數(shù)功能塊的編程
USS通信接口參數(shù)功能塊的編程如下圖所示。

圖7: USS通信接口參數(shù)功能塊的編程
USS_PORT功能塊用來(lái)處理USS網(wǎng)絡(luò)上的通信,,它是S71200 CPU與變頻器的通信借口,。每個(gè)CM1241 RS485模塊有且必須有一個(gè)USS_PORT功能塊。
PORT:指的是通過(guò)哪個(gè)通信模塊進(jìn)行USS通信,。
BAUD:指的是和變頻器進(jìn)行通行的速率,。 變頻器的參數(shù)P2010種進(jìn)行設(shè)置,。
USS_DB:指的是和變頻器通信時(shí)的USS數(shù)據(jù)塊。每個(gè)通信模塊多可以有16個(gè)USS數(shù)據(jù)塊,,每個(gè)CPU多可以有48個(gè)USS數(shù)據(jù)塊,,具體的通信情況要和現(xiàn)場(chǎng)實(shí)際情況相聯(lián)系。每個(gè)變頻器與S7-1200進(jìn)行通信的數(shù)據(jù)塊是的,。
ERROR:輸出錯(cuò)誤,。
STATUS:掃描或初始化的狀態(tài)。
S7-1200 PLC與變頻器的通信是與它本身的掃描周期不同步的,,在完成一次與變頻器的通信事件之前,,S7-1200通常完成了多個(gè)掃描。
USS_PORT通信的時(shí)間間隔是S7-1200與變頻器通信所需要的時(shí)間,,不同的通信波特率對(duì)應(yīng)的不同的USS_PORT通信間隔時(shí)間,。下圖列出了不同的波特率對(duì)應(yīng)的USS_PORT小通信間隔時(shí)間。

圖8:不同的波特率對(duì)應(yīng)的USS_PORT小通信間隔時(shí)間