7種標(biāo)準(zhǔn)型CPU(CPU 312,CPU 314,CPU 315-2 DP,CPU 315-2 PN/DP,CPU 317-2 DP,CPU 317-2 PN/DP,CPU 319-3 PN/DP)
6 個緊湊型 CPU(帶有集成技術(shù)功能和 I/O)(CPU 312C,、CPU 313C,、CPU 313C-2 PtP、CPU 313C-2 DP、CPU 314C-2 PtP,、CPU 314C-2 DP)
5 個故障安全型 CPU(CPU 315F-2 DP,、CPU 315F-2 PN/DP、CPU 317F-2 DP,、CPU 317F-2 PN/DP,、CPU 319F-3 PN/DP)
2種技術(shù)型CPU(CPU 315T-2 DP, CPU 317T-2 DP)
18種CPU可在-25°C 至 +60°C的擴(kuò)展的環(huán)境溫度范圍中使用
具有不的能等級,滿足不同的應(yīng)用領(lǐng)域,。

Area of application
SIMATIC S7-300 提供多種能等級的 CPU,。除了標(biāo)準(zhǔn)型 CPU 外,還提供緊湊型 CPU,。
時還提供技術(shù)功能型 CPU 和故障安全型 CPU,。
1、SIMATIC S7 系列PLC,、S7200,、s71200,、S7300,、S7400、ET200
2,、邏輯控制模塊 LOGO,!230RC、230RCO,、230RCL,、24RC、24RCL等
3,、SITOP 系列直流電源 24V DC 1.3A,、2.5A、3A,、5A,、10A、20A,、40A
4,、HMI 觸摸屏TD200 TD400C TP177,MP277 MP377 SMART700 SMART1000
常見西門子DP頭:
6ES7 972-0BB12-0xA0 :
90度電纜出線,集成終端電阻,,9針 Sub-D插座,,有編程口,不支持快速連接
6ES7 972-0BA12-0xA0 :
90度電纜出線,,集成終端電阻,,9針 Sub-D插座,無編程口,不支持快速連接
6ES7 972-0BA42-0xA0 :
35度電纜出線,,集成終端電阻,,9針 Sub-D插座,無編程口,,支持快速連接
6ES7 972-0BA52-0xA0 :
90度電纜出線,,集成終端電阻,9針 Sub-D插座,,無編程口,,支持快速連接
6ES7 972-0BB42-0xA0 :
35度電纜出線,集成終端電阻,,9針 Sub-D插座,,有編程口,不支持快速連接
- 【西門子PROFIBUS詳細(xì)介紹】

- PROFIBUS,,是一種化,、開放式、不依賴于設(shè)備生產(chǎn)商的現(xiàn)場總線標(biāo)準(zhǔn),。PROFIBUS傳送速度可在 9.6kbaud~12Mbaud范圍內(nèi)選擇且當(dāng)總線系統(tǒng)啟動時,,所有連接到總線上的裝置應(yīng)該被設(shè)成相同的速度。廣泛適用于制造業(yè)自動化,、流程工業(yè)自動化和樓宇,、交通電力等其他領(lǐng)域自動化。PROFIBUS是一種用于工廠自動化車間級監(jiān)控和現(xiàn)場設(shè)備層數(shù)據(jù)通信與控制的現(xiàn)場總線技術(shù),??蓪崿F(xiàn)現(xiàn)場設(shè)備層到車間級監(jiān)控的分散式數(shù)字控制和現(xiàn)場通信網(wǎng)絡(luò),從而為實現(xiàn)工廠綜合自動化和現(xiàn)場設(shè)備智能化提供了可行的解決方案
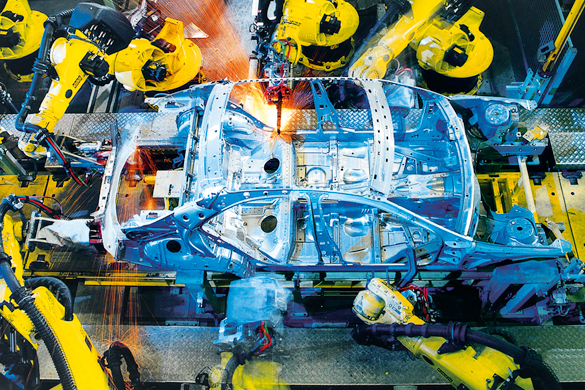
汽車工業(yè)機(jī)器人消耗的電能占車身制造能耗總量的一半以上,。西門子攜手大眾汽車和弗勞恩霍夫協(xié)會共同開發(fā)運(yùn)動優(yōu)化算法,,大大降低了機(jī)器人的耗電量。
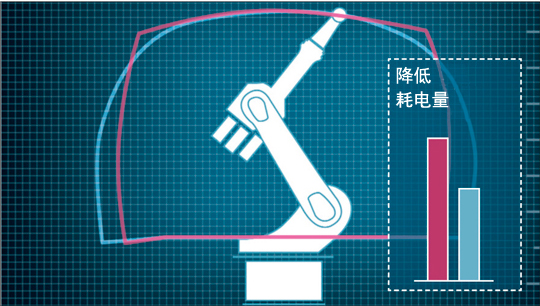
一家汽車制造廠一年消耗的電能堪比一座中型城市,。工業(yè)機(jī)器人是其中的能耗大戶,。通過優(yōu)化其運(yùn)動,可以將耗電量-多降低50%,。
電 話:(同號)
一只巨型機(jī)械臂輕而易舉地舉起車門,,并以毫米級的精度將其安裝到車身上。其他機(jī)械臂也幾幾乎同時迅速靠攏,,相互之間以毫厘之距擦肩而過,。這些機(jī)械臂是用來對車門進(jìn)行焊接的,一時間,,火花四濺,。當(dāng)這項任務(wù)完成之后,這些機(jī)械臂和來時一樣迅速離去,而車身則滾滾向前,,前往下一個裝配站,。這如同一場精心排演的芭蕾舞,數(shù)以千計的工業(yè)機(jī)器人在工廠隨時“翩翩起舞”,。然而,,與舞者不同的是,機(jī)械臂不需要任何休息,。但是,,它們對電能的胃口則*饜足。一家日產(chǎn)千輛的汽車廠,,每年可輕而易舉地消耗數(shù)億度電能——堪比一座中型城市,。負(fù)責(zé)驅(qū)動傳送帶、機(jī)器和泵的電機(jī),,以及操作機(jī)械臂關(guān)節(jié)的電機(jī),,所消耗的電能要占工業(yè)耗電量的三分之二左右。然而,,要從負(fù)責(zé)裝配車身的工業(yè)機(jī)器人的控制系統(tǒng)中挖掘節(jié)電潛力,,還有很長的路要走。
為了找出行之有效的辦法,,大眾汽車,、西門子和弗勞恩霍夫協(xié)會聯(lián)合發(fā)起了一個為期三年的研究項目,細(xì)致深入地考察制造機(jī)械臂的運(yùn)動,。這個名為“綠色車身技術(shù)創(chuàng)新聯(lián)盟(InnoCaT)”的項目,旨在使用高-效的軟件解決方案來優(yōu)化生產(chǎn)過程,,以大幅降低其耗電量,。迄今為止,生產(chǎn)線機(jī)械臂的運(yùn)動路徑通常是由人工編程,。機(jī)械臂運(yùn)動過程中遇到的障礙物和設(shè)置安裝高度時的失誤,,是推高耗電量的一般因素。然而,,-費電的過程是機(jī)械臂頻頻變換運(yùn)動方向時發(fā)生的減速和加速,。
西門子工業(yè)的整合Matthias Frische是InnoCaT一個子項目的負(fù)責(zé)人,他說:“目前,,幾乎所有工業(yè)機(jī)器人都尚未實現(xiàn)運(yùn)動優(yōu)化,。但突發(fā)運(yùn)動會造成耗電高峰和機(jī)械應(yīng)力。”有鑒于此,,F(xiàn)rische取得的一個重要研究成果是一個模擬模型,,它能計算出不存在任何方向突變的優(yōu)化曲線。這個模型值得稱道之處在于,它不要求更換機(jī)械臂,,因為它只是改進(jìn)了它們的運(yùn)動方式,。Frische說:“這就好比學(xué)跳芭蕾舞。練習(xí)一段時間后,,舞者的動作會變得更加優(yōu)雅,、高-效,哪怕身體還是原來的,。”
為了開發(fā)運(yùn)動優(yōu)化算法,,項目團(tuán)隊將一個典型的汽車工業(yè)機(jī)器人搬到實驗室,對它執(zhí)行多種不同任務(wù)時的能耗進(jìn)行了分析,。然后根據(jù)分析結(jié)果,,創(chuàng)建了一個模擬模型。每一次測定之后,,科學(xué)家們都要調(diào)節(jié)多種不同的參數(shù),,由此逐步確定哪些設(shè)置的節(jié)電潛力-大。Frische解釋道:“人類在搬運(yùn)重物時,,他們會本能地以盡可能-符合人機(jī)工程學(xué)的方式運(yùn)動,。同樣,模擬模型可以為機(jī)器人計算出實現(xiàn)了動力學(xué)優(yōu)化的節(jié)電運(yùn)動路徑,。這樣的路徑,,堪比跑車在彎道上行駛的軌跡。”試驗結(jié)果令項目團(tuán)隊驚喜不已,,因為結(jié)果表明,,優(yōu)化路徑的節(jié)電潛力高達(dá)10%到50%。Frische補(bǔ)充道:“通過從突發(fā)運(yùn)動改為弧線運(yùn)動,,機(jī)械臂的機(jī)械應(yīng)力得以降低,,從而降低了維護(hù)要求,縮短了停工時間,。”
項目團(tuán)隊對所取得的滿載希望的試驗結(jié)果進(jìn)行了分析,,以確定能否將之轉(zhuǎn)化為實際操作。因為沿生產(chǎn)線分布的裝配站必須進(jìn)行嚴(yán)絲合縫的裝配,,所以重新設(shè)計的機(jī)械臂運(yùn)動,,必須與過去那種突發(fā)運(yùn)動一樣迅速,并且精-確匹配動作周期,。
在第-一階段的工作中,,研究人員為用于車身制造的機(jī)械臂人工編寫了運(yùn)動路徑程序。這些路徑基于模擬中計算出的理想曲線,。測定結(jié)果表明,,甚至在實際生產(chǎn)條件下,,節(jié)電也可高達(dá)50%。在2014年初開展的第二-階段工作中,,工程師測試并改進(jìn)了一個能自動優(yōu)化特定運(yùn)動耗電量的軟件模塊,。
程序員首先規(guī)定機(jī)械臂必須到達(dá)的位置,如一系列焊點,。軟件僅需數(shù)秒鐘就能計算出焊點之間-節(jié)電的路徑,。軟件還能保證機(jī)械臂相互之間保持-短距離。這不是一件容易的事,,因為機(jī)械臂必須沿著復(fù)雜的位置順序快速移動,。軟件需在短短數(shù)秒之內(nèi)完成全部計算。相比之下,,以人工方式優(yōu)化每一條機(jī)械臂運(yùn)動路徑,,則要花好幾天時間。由于汽車裝配廠通常具備數(shù)以千計的機(jī)械臂,,因此,,若以人工方式執(zhí)行這一任務(wù),所需的工作量將高得驚人,。對Frische而言,,其益處顯而易見,他說:“我們的軟件,,將有史以來第-一次允許自動優(yōu)化運(yùn)動路徑的能效,,因而十分經(jīng)濟(jì)劃算。”
今年晚些時候,,一個與西門子Tecnomatix生產(chǎn)規(guī)劃軟件有關(guān)的軟件模塊可能面市,。Frische表示: “事實上,制造企業(yè)僅需按下按鈕就能降低其耗電量,,同時為保護(hù)環(huán)境做出貢獻(xiàn),。我們的軟件有助于程序員為機(jī)械臂設(shè)計出能節(jié)約資源的交互動作。”
Stefan Schröder
機(jī)械臂和機(jī)床:智力融合
制造業(yè)的自動化程度越來越高,。因此,制造商正在探索既能提高資源使用效率,,又能同時提升其生產(chǎn)過程靈活性的新途徑,。要實現(xiàn)這樣的發(fā)展,一個重要的前提條件是,,著眼于機(jī)械臂與機(jī)床的交互作用方式,,使生產(chǎn)機(jī)器精-確地協(xié)調(diào)運(yùn)轉(zhuǎn)。正因為如此,,西門子正在與KUKA合作研究如何將機(jī)械臂和機(jī)床的控制系統(tǒng)合為一體,。KUKA是機(jī)械臂和機(jī)器生產(chǎn)領(lǐng)域的領(lǐng)-先供應(yīng)商之一,。
西門子DP電纜中國授權(quán)總代理商

對企業(yè)而言,技術(shù)*的機(jī)床是一筆重大投資,。因此,,-大限度地提高其利用率和效率是明智之舉。過去,,負(fù)責(zé)將工件插入機(jī)器,,并在加工完畢之后將之取出的工業(yè)機(jī)器人的程序,是利用其自有控制單元來編寫的,。然而現(xiàn)在,,可以在機(jī)床的用戶界面上直接為這樣的機(jī)械臂編程。這樣一來,,就能更好地協(xié)調(diào)機(jī)器的加工工序,,同時大幅降低為相關(guān)機(jī)械臂編寫程序的工作量。
另一個目標(biāo)是,,進(jìn)一步改善工件加工過程中機(jī)械臂與機(jī)床之間的交互動作,。未來,將要求機(jī)械臂執(zhí)行諸如磨,、銑等簡單任務(wù),,特別是在加工新材料時。到那時,,機(jī)床將被專門用于要求巨大力量或*精度的生產(chǎn)工序,。這有望提高機(jī)床的利用率。
由于其工作范圍廣,,并且具備靈活的運(yùn)動軸,,因此,機(jī)械臂也可以加工復(fù)雜或大型的部件,。譬如,,它們可以取代成本不菲的特-制設(shè)備,加工風(fēng)輪機(jī)葉片或機(jī)翼等部件,。在這種情況下,,也可以在共享用戶界面上控制系統(tǒng)。從設(shè)計到模擬生產(chǎn),,再到工程和車間投產(chǎn)階段,,所有這一切,將改善機(jī)器在其整個生命周期內(nèi)的相互協(xié)調(diào)性
 您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)













