












九江西門子S7-200代理商 九江西門子S7-200代理商
潯之漫智控技術(shù)有限公司 上海詩(shī)慕自動(dòng)化設(shè)備有限公司
本公司銷售西門子自動(dòng)化產(chǎn)品,,*,,質(zhì)量保證,價(jià)格優(yōu)勢(shì)
西門子PLC,西門子觸摸屏,,西門子數(shù)控系統(tǒng),,西門子軟啟動(dòng),西門子以太網(wǎng)
西門子電機(jī),,西門子變頻器,,西門子直流調(diào)速器,西門子電線電纜
我公司大量現(xiàn)貨供應(yīng),,價(jià)格優(yōu)勢(shì),,*,德國(guó)*
開關(guān)電源選型的選型主要考慮以下幾個(gè)方面:
1,、并聯(lián)或串聯(lián)工作
產(chǎn)品分類
可編程控制器是由現(xiàn)代化生產(chǎn)的需要而產(chǎn)生的,,可編程序控制器的分類也必然要符合現(xiàn)代化生產(chǎn)的需求。
西門子PLCS7-200系列
一般來說可以從三個(gè)角度對(duì)可編程序控制器進(jìn)行分類,。其一是從可編程序控制器的控制規(guī)模大小去分類,,其二是從可編程序控制器的性能高低去分類,其三是從可編程序控制器的結(jié)構(gòu)特點(diǎn)去分類,。
控制規(guī)模
可以分為大型機(jī),、中型機(jī)和小型機(jī)。
西門子PLCS7-300系列
小型機(jī): 小型機(jī)的控制點(diǎn)一般在256點(diǎn)之內(nèi),適合于單機(jī)控制或小型系統(tǒng)的控制,。
西門子小型機(jī)有S7-200:處理速度0.8~1.2ms ,;存貯器2k ;數(shù)字量248點(diǎn),;模擬量35路 ,。
中型機(jī):中型機(jī)的控制點(diǎn)一般不大于2048點(diǎn),可用于對(duì)設(shè)備進(jìn)行直接控制,還可以對(duì)多個(gè)下一級(jí)的可編程序控制器進(jìn)行監(jiān)控,,它適合中型或大型控制系統(tǒng)的控制。
西門子中型機(jī)有S7-300:處理速度0.8~1.2ms ,;存貯器2k ,;數(shù)字量1024點(diǎn);模擬量128路 ;網(wǎng)絡(luò)PROFIBUS,;工業(yè)以太網(wǎng),;MPI。
大型機(jī):大型機(jī)的控制點(diǎn)一般大于2048點(diǎn),不僅能完成較復(fù)雜的算術(shù)運(yùn)算還能進(jìn)行復(fù)雜的矩陣運(yùn)算,。它不僅可用于對(duì)設(shè)備進(jìn)行直接控制,,還可以對(duì)多個(gè)下一級(jí)的可編程序控制器進(jìn)行監(jiān)控。
西門子PLCS7-400系列
西門子大型機(jī)有S7-400 :處理速度0.3ms / 1k字,;
存貯器512k ,;I/O點(diǎn)12672;
控制性能
可以分為高檔機(jī),、中檔機(jī)和低檔機(jī),。
低檔機(jī)
這類可編程序控制器,具有基本的控制功能和一般的運(yùn)算能力,。工作速度比較低,,能帶的輸入和輸出模塊的數(shù)量比較少。
比如,,德國(guó)SIEMENS公司生產(chǎn)的S7-200就屬于這一類,。
中檔機(jī)
這類可編程序控制器,具有較強(qiáng)的控制功能和較強(qiáng)的運(yùn)算能力,。它不僅能完成一般的邏輯運(yùn)算,,也能完成比較復(fù)雜的三角函數(shù)、指數(shù)和PID運(yùn)算,。工作速度比較快,,能帶的輸入輸出模塊的數(shù)量也比較多,輸入和輸出模塊的種類也比較多,。
比如,,德國(guó)SIEMENS公司生產(chǎn)的S7-300就屬于這一類。
高檔機(jī)
這類可編程序控制器,,具有強(qiáng)大的控制功能和強(qiáng)大的運(yùn)算能力,。它不僅能完成邏輯運(yùn)算、三角函數(shù)運(yùn)算,、指數(shù)運(yùn)算和PID運(yùn)算,,還能進(jìn)行復(fù)雜的矩陣運(yùn)算。工作速度很快,,能帶的輸入輸出模塊的數(shù)量很多,,輸入和輸出模塊的種類也很全面。這類可編程序控制器可以完成規(guī)模很大的控制任務(wù),。在聯(lián)網(wǎng)中一般做主站使用,。
比如,,德國(guó)SIEMENS公司生產(chǎn)的S7-400就屬于這一類。
結(jié)構(gòu)
整體式
整體式結(jié)構(gòu)的可編程序控制器把電源,、CPU,、存儲(chǔ)器、I/O系統(tǒng)都集成在一個(gè)單元內(nèi),,該單元叫做作基本單元,。一個(gè)基本單元就是一臺(tái)完整的PLC。
plc結(jié)構(gòu)
控制點(diǎn)數(shù)不符合需要時(shí),,可再接擴(kuò)展單元,。整體式結(jié)構(gòu)的特點(diǎn)是非常緊湊、體積小,、成本低,、安裝方便。
組合式
組合式結(jié)構(gòu)的可編程序控制器是把PLC系統(tǒng)的各個(gè)組成部分按功能分成若干個(gè)模塊,,如CPU模塊,、輸入模塊、輸出模塊,、電源模塊等等,。其中各模塊功能比較單一,模塊的種類卻日趨豐富,。比如,,一些可編程序控制器,除了-些基本的I/O模塊外,,還有一些特殊功能模塊,,像溫度檢測(cè)模塊、位置檢測(cè)模塊,、PID控制模塊,、通訊模塊等等。組合式結(jié)構(gòu)的PLC特點(diǎn)是CPU,、輸入,、輸出均為獨(dú)立的模塊。模塊尺寸統(tǒng)一,、安裝整齊,、I/O點(diǎn)選型自由、安裝調(diào)試,、擴(kuò)展,、維修方便。
plc組合
疊裝式
疊裝式結(jié)構(gòu)集整體式結(jié)構(gòu)的緊湊,、體積小,、安裝方便和組合式結(jié)構(gòu)的I/O點(diǎn)搭配靈話,、安裝整齊的優(yōu)點(diǎn)于一身,。它也是由各個(gè)單元的組合構(gòu)成,。其特點(diǎn)是CPU自成獨(dú)立的基本單元(由CPU和一定的I/O點(diǎn)組成),其它I/O模塊為擴(kuò)展單元,。在安裝時(shí)不用基板,,僅用電纜進(jìn)行單元間的聯(lián)接,各個(gè)單元可以一個(gè)個(gè)地疊裝,。使系統(tǒng)達(dá)到配置靈活,、體積小巧。
當(dāng)一個(gè)電源不能滿足所需的電壓或電流范圍時(shí),,可將兩個(gè)或多個(gè)電源(或?qū)⑼浑娫吹牟煌敵?并聯(lián)或串聯(lián)起來使用,。在這種工作模式下,各電源模塊間的穩(wěn)壓和控制電路之間的聯(lián)系仍然存在,,只不過一個(gè)電源作為主控方另一個(gè)電源作為受控方使用,。
2、脈動(dòng)與噪聲
理想的直流電源應(yīng)提供純凈的直流,,然而總有一些干擾存在,,比如在開關(guān)電源輸出端口疊加的脈動(dòng)電流和高頻振蕩。這兩種干擾再加上電源本身產(chǎn)生的尖峰噪聲使電源出現(xiàn)斷續(xù)和隨意的漂移,。
3,、過載保護(hù)
因?yàn)橐粋€(gè)電源要供給不同的電路使用,這些電路的電流的流量可能是未知的,,為了避免對(duì)電源的損壞,,需設(shè)置保護(hù)電路的范圍。
幾乎所有的電源都具有以下特點(diǎn):在超出輸出范圍時(shí),,要么輸出保持在輸出值,,要么就自行關(guān)閉電源。某些程控電源除可用程序設(shè)定輸出范圍外,,還能自動(dòng)設(shè)置電源穩(wěn)定輸出的類型,。也就是說,當(dāng)外電路需要的電壓或電流超過設(shè)置極*,,電源可自動(dòng)地由恒壓源變成恒流源或由值流源變成恒壓源,。
4、內(nèi)部阻抗
相對(duì)較大的電源內(nèi)阻對(duì)負(fù)載來講有兩點(diǎn)不利,,首先是不利于負(fù)載穩(wěn)壓電路工作,,更為不利的是負(fù)載電流的任何變化都會(huì)導(dǎo)致直流電源輸出的起伏,這種起伏對(duì)測(cè)試結(jié)果的影響同脈沖與噪聲對(duì)測(cè)試結(jié)果造成的影響*相同,。
5,、穩(wěn)定度
當(dāng)線電壓或負(fù)載電流變化肘,,直流電源的輸出電壓也會(huì)有所起伏。穩(wěn)壓程度由穩(wěn)壓電路的參數(shù)決定,,參數(shù)是指濾波電容的容量和能量釋放的速率,。
如果給電源供電的一個(gè)相對(duì)恒定的電源,那么只需基本的負(fù)載穩(wěn)壓,。穩(wěn)定度的大小一般定義為空載或滿載時(shí)輸出電壓的百分比,,或電壓的變化值。
綜上所述,,西門子SITOP電源為用戶提供了更穩(wěn)定更可靠的供電保障,。用戶通過選擇和使用西門子SITOP電源模塊,可以為自動(dòng)化控制系統(tǒng)的供電提供強(qiáng)有力的支持,,從而保證了控制系統(tǒng)的穩(wěn)定運(yùn)行,。在自動(dòng)化控制系統(tǒng)電源的配置過程中,用戶可以參考本文提供的方式進(jìn)行配置,。
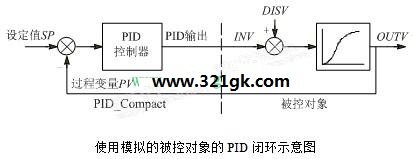
西門子S7-1500 PID參數(shù)自整定實(shí)驗(yàn)
我分別用硬件CPU 1516-3PN/DP和仿真plc與FB“被控對(duì)象”組成虛擬的PID閉環(huán),,都成功地實(shí)現(xiàn)了PID參數(shù)自整定。
在PID整定窗口設(shè)置采樣時(shí)間為0.3s,,預(yù)調(diào)節(jié)之前PID的增益為0.3,,積分時(shí)間為3s,微分時(shí)間為0s,。
單擊采樣時(shí)間右邊的“Start”按鈕,,啟動(dòng)測(cè)量。用右上角的選擇框設(shè)置調(diào)節(jié)模式為“預(yù)調(diào)節(jié)”,。用I0.0使設(shè)定值從0跳變到70%,,立即單擊“調(diào)節(jié)模式”區(qū)的“Start”按鈕,啟動(dòng)預(yù)調(diào)節(jié),。
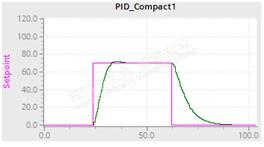
下圖左邊是預(yù)調(diào)節(jié)的曲線,,紅色的是PID的輸出值Output,PV是過程變量,,SP為階躍設(shè)定值,。預(yù)調(diào)節(jié)成功地完成后,下面的狀態(tài)欄出現(xiàn)“系統(tǒng)已調(diào)節(jié)”的信息,。

過程變量和設(shè)定值曲線基本上重合后,,將調(diào)節(jié)模式修改為“調(diào)節(jié)”。單擊“調(diào)節(jié)模式”區(qū)的“Start”按鈕,,啟動(dòng)調(diào)節(jié),。經(jīng)過一段時(shí)間后,紅色的PID輸出曲線以方波波形變換,,通過自動(dòng)控制PID輸出的幅值和頻率,,保證過程變量曲線在設(shè)定值水平線上下一定范圍內(nèi)波動(dòng),。PID輸出曲線經(jīng)過若干次正、負(fù)跳變后,,調(diào)節(jié)結(jié)束,,下面的狀態(tài)欄出現(xiàn)“系統(tǒng)已調(diào)節(jié)”的信息。
調(diào)節(jié)成功完成后,,單擊PID調(diào)試窗口下面的“上傳PID參數(shù)”按鈕,,將CPU中的PID參數(shù)上傳到離線的項(xiàng)目中,。單擊“轉(zhuǎn)到PID參數(shù)”按鈕,,切換到組態(tài)窗口PID參數(shù)頁(yè)面,可以看到調(diào)節(jié)后CPU中得到的優(yōu)化的PID參數(shù),。
為了觀察優(yōu)化后的參數(shù)的控制效果,,切換到PID調(diào)節(jié)窗口。令I(lǐng)0.0為FALSE,,過程值下降到0以后,,令I(lǐng)0.0為TRUE,使設(shè)定值由0跳變到70%,,過程變量的響應(yīng)曲線如下圖所示,。由圖可知優(yōu)化的PID參數(shù)的控制效果是比較理想的。


 化工儀器網(wǎng)
化工儀器網(wǎng)