以智能手機為主,包括智能腕表,、健身追蹤器和可聽戴設備等在內(nèi)的各類便攜式聯(lián)網(wǎng)電子設備,,*改變了我們的生活。這些設備在數(shù)據(jù)采集中融入了處理功能和無線聯(lián)網(wǎng)技術。
但是,,相比其他所有功能特性,,運動傳感器
對于
便攜式設備的實用和直觀的重要性很容易被忽略。無論是在手機上改變屏幕方向,、在智能腕表上統(tǒng)計步數(shù),、匹配頭部運動和擴展現(xiàn)實(XR)眼鏡,還是輕敲耳塞式耳機來更換歌曲,,動作感測始終是用戶體驗和界面的重要組成部分,。
對于嵌入式工程師而言,選擇和集成運動傳感器
可能會很棘手,。如何確保在不增加不必要的成本或功耗的前提下,,選擇正確的技術以獲得所需的準確度?以及如何確保最大限度地利用傳感器
,,并且不會錯過可以改進最終產(chǎn)品的性能或功能,?
1 運動傳感器#FormatImgID_3#基本原理
首先,快速回顧一下我們所說的運動傳感器
,。常用的有三種:加速計,、陀螺儀和磁強計。加速計用于測量加速度(包括重力加速度),。這意味著它可以感測重力相對于傳感器的方向(基本上是朝上的方向),。陀螺儀通過測量角速度來測量角位置的變化。
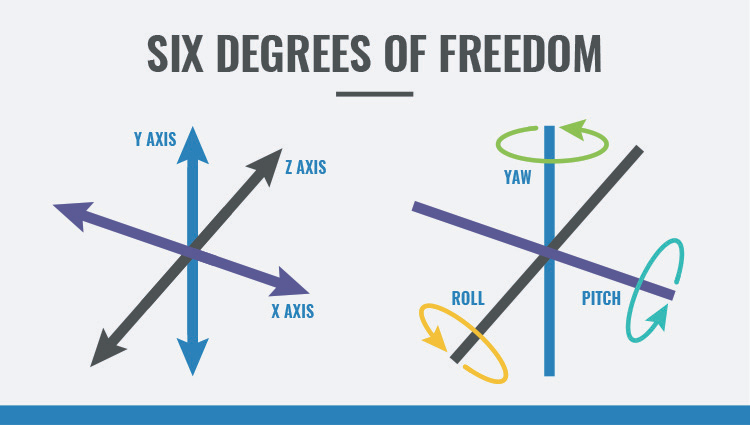
加速計和陀螺儀各有3 個自由度(或3 個軸),,兩者結合就可以得到一個6 軸運動傳感器,,或稱IMU(慣性測量單元,見圖1),。在許多應用中,,我們還需要增加一個測量地球磁場強度和方向的磁強計,以便于估計我們前進的方向,。在加速計和陀螺儀上添加一個3 軸磁強計,,就可以得到一個9 軸IMU。
因此,,本文我們將深入探討IMU,。雖然我們討論的某些特性可以單獨應用于加速計、陀螺儀或磁強計本身,,但我們想要闡述的是將至少兩種傳感器結合起來所面臨的挑戰(zhàn),。
圖1 IMU實現(xiàn)運動感測 (來源: CEVA)
2 保持準確
現(xiàn)在我們已經(jīng)回顧了IMU 的理論知識,如何在實踐中實施,?我們?nèi)绾尾拍塬@得所需的準確度,?對于IMU 來說,,在確定設備行進方向時所獲得的準確度是一個我們可以作為起始點的基礎度量標準。我們的要求可能在一到兩度范圍內(nèi),,而較低的準確度可以被其他應用程序接受。例如,,XR 耳機的準確度要求遠遠超過兒童的機器人玩具,。然后我們應該考慮該數(shù)據(jù)的穩(wěn)定性,以及它是否會隨時間和溫度發(fā)生變化,。
從我們的IMU 獲得高準確度輸出需要應用感測融合概念,,即融合多個傳感器的數(shù)據(jù)以創(chuàng)建整體大于部分的總和。IMU 的每個傳感器都各有優(yōu)劣勢,,將其融合在一起可形成更好的解決方案,。考慮感測融合的一種方式是基于“信任”,。在這種情況下,,我們可以使用“信任”表示,來自特定傳感器的數(shù)據(jù)在準確性和相關性方面具有合理的可信度,。假設你是一個國家的“總統(tǒng)”,,則必須由你決定相關政策。你有經(jīng)濟,、衛(wèi)生和軍事顧問,。每個人都可
以為你提供一份信息,但他們分屬不同領域,。他們會考慮各自的觀點將如何影響“同僚”,,最終要由你來處理和融合他們的信息,以形成良好決策,。
你同樣有兩至三個可以從IMU 獲得定向數(shù)據(jù)的“顧問”:加速計,、陀螺儀以及磁強計。陀螺儀最容易解釋,。消費級陀螺儀無疑可以在短短幾秒鐘內(nèi)進行相對方向的更改,,但輸出將漂移較長的時間間隔,甚至會達到數(shù)十秒以上,。加速計有助于長期測量重力,,但可能無法識別特定場景,比如汽車的恒定加速度,。我們可以在穩(wěn)定的磁場環(huán)境中(例如鄉(xiāng)村或森林)使用磁強計,,但如果有磁場干擾,比如在鋼結構建筑物內(nèi),,可信度就會降低,。
總之,,陀螺儀適用于短期測量,加速度計和磁強計適用于長期測量,。詳細了解它們的局限性后,,就可以把它們的數(shù)據(jù)融合在一起,獲得更準確的設備方位圖,。
對于多個傳感器輸出信息(如9 軸IMU),,感測融合使我們有機會整合并對比數(shù)據(jù),從而提高精度,。例如,,如果我們的感測融合軟件包含一種算法,可以檢測由于磁場干擾而導致磁強計輸出發(fā)生的意外或突然變化,,那么在磁強計恢復穩(wěn)定之前,,算法可以自動提升對加速計和陀螺儀數(shù)據(jù)的信心。
采樣率對于精度也很重要——所選傳感器提供的數(shù)據(jù)是否足夠滿足需求,?當然,,這具體取決于應用程序:例如,對于一個基礎計步器而言,,每秒幾次讀數(shù)可能已經(jīng)足夠,,但對于大多數(shù)應用來說,建議采樣頻率達到100 Hz 到400 Hz,。然而,,在XR 應用中,精的頭部跟蹤可能需要1kHz 或更高的采樣率(此處XR 是VR,、MR 和AR 的統(tǒng)稱),。快速采樣率對于實現(xiàn)低延遲同樣重要,,在我們的頭部跟蹤示例中,,這代表著沉浸式VR 體驗和運動暈眩感受之間的本質區(qū)別!
我們還需要考慮校準,。許多傳感器都是按“原樣”提供,,輸出信息比僅供參考的數(shù)據(jù)表沒有太多變化。任何類型的校準都將有助于最大限度保持不同個體傳感器之間的性能一致性,。工廠校準是提高個體性能的一種強有力方式,,但成本相對昂貴。現(xiàn)場動態(tài)校準是另一種方案,,需要對傳感器本身或至少對應用程序有詳細的了解,。傳感器的應用偏差如果不解釋清楚,就會對整體輸出產(chǎn)生可能加劇現(xiàn)有任何錯誤的負面影響,。
最后,,我們需要考慮如何驗證我們獲得的傳感器數(shù)據(jù),,并將它們?nèi)诤显谝黄稹km然這取決于我們的追蹤目標,,但基本原則是利用另一個獨立的信息源來提供真實狀態(tài)支持我們檢查傳感器輸出,。例如,機器人的手臂可以非常準確地重復移動到已知點,,然后我們可以查看傳感器是否給我們提供相同的位置數(shù)據(jù),。當我們檢測到錯誤時,有可能通過計算進行彌補,,或者將其標記為需要進一步關注的錯誤。
圖2 可聽戴設備 (來源:CEVA)
3 啟用新功能
一旦我們獲得了高精度測量運動的能力,,它不僅有助于現(xiàn)有的應用程序,,還可以讓便攜式設備的新功能付諸實現(xiàn)。例如,,可聽戴設備(圖2)的傳統(tǒng)用戶界面存在問題:用戶不想取出手機進行控制,,而且可聽戴設備本身太小,沒有方便的按鈕,。相反,,輕敲可聽戴設備可以用來跳過曲目,探測從耳朵里取出的動作可以用來靜音所有音頻——因為該動作很可能表明希望音頻停止播放,。利用運動跟蹤以及“遙感分類器”等識別不同動作的算法,,提供更方便和直觀的用戶體驗。
運動傳感器提供的準確信息同樣意味著便攜式設備可以更好地了解周圍發(fā)生的事情,,或者攜帶者正在進行的活動,。這就是所謂的情境感知,可以用來提供更身臨其境的體驗,,比如當你走到人行橫道時,,音樂音量會自動調(diào)低,以便讓你聽到附近救護車的警報聲,。
對于健身跟蹤應用程序,,提高精度可以區(qū)分不同的用戶活動。例如,,如果你的步動跟蹤器可以測量運動的規(guī)模,、速度或其他特征,它就可以判斷出你是正常行走,,還是爬樓梯或下樓梯,。融合其他傳感器數(shù)據(jù),如氣壓和GPS 定位,, 軟件可以建立詳細的運動圖像,,并估算出燃燒的卡路里,。
圖3 綜合感測融合和算法(來源:CEVA)
4 合而為一:感測融合與軟件
正如我們所討論的,為了運動數(shù)據(jù)的精度和有效性,,僅僅生成一個原始數(shù)據(jù)提要是不夠的,。設備需要處理數(shù)據(jù),補償系統(tǒng)的不準確性,,并整合來自多個傳感器的信息,。
其中有很多信息需要處理。感測融合非常復雜,,需要特定的專業(yè)技術才能在小身軀的設備中達到良好效果,。然而,目前有各種產(chǎn)品集成了所需的傳感器和處理程序——例如,,由Bosch 和CEVA Hillcrest Labs合作開發(fā)的BNO080/085,,集成了高性能加速計、磁強計和陀螺儀,,以及低功耗MCU,。
Hillcrest Labs 的MotionEngine™ 傳感器中心軟件在BNO085 上預先編程,提供6 軸和9 軸運動跟蹤,,以及其他智能功能,,例如對行走、跑步和站立等用戶活動進行分類(圖3),。MotionEngine 傳感器中心兼容的嵌入式處理架構和操作系統(tǒng),,專業(yè)版適用于可聽戴設備、智能電視,、機器人,、移動計算、遙控,、低功耗移動應用程序等,。
實時整合所有數(shù)據(jù)具有很大挑戰(zhàn)性,并且所需的處理性能非同小可,。選擇集成傳感器在傳感器設備本身的MCU 核心上運行這些算法,,而不是通過一個主應用處理器來承擔這些繁瑣事項。尤其是對于像計步這樣“始終開啟”的任務,,如果我們能夠避免每次檢測到移動時都喚醒主處理器,,就可以保持睡眠模式,從而可以減少總功耗,,并延長電池壽命,。回到我們前面的“總統(tǒng)”類比,,專注于感測融合的SiP(系統(tǒng)級封裝)就像讓一位“副總統(tǒng)”來處理某些決策,,以便作為“總統(tǒng)”的主處理器可以專注于更緊迫的任務,。
5 結論
運動傳感器在諸多應用中都扮演著重要角色,至于說如何選擇適當?shù)脑O備以及如何達到應用所需的精度,,乃至需要多高的精度,,則并不總是那么簡單明確。不同的用例需要不同的精度級別,,并且需要不同的數(shù)據(jù)類型,。
集成傳感器和感測融合通常可以為這一問題提供解決方案,。通過與適當?shù)墓毯献?,可以確保毫無保留地獲得準確、可靠的數(shù)據(jù)以及特定應用程序的增值功能——同時將成本和功耗限制在較低水平,。