 化工儀器網(wǎng)
化工儀器網(wǎng)









產(chǎn)品簡介
| 應(yīng)用領(lǐng)域 | 化工,生物產(chǎn)業(yè),農(nóng)林牧漁 |
|---|
| 世聯(lián)博研(北京)科技有限公司 |
|
—— 銷售熱線 ——
13261877206 |
| 參考價(jià) | 面議 |
更新時(shí)間:2024-03-12 13:07:17瀏覽次數(shù):284
聯(lián)系我們時(shí)請(qǐng)說明是化工儀器網(wǎng)上看到的信息,,謝謝!
| 應(yīng)用領(lǐng)域 | 化工,生物產(chǎn)業(yè),農(nóng)林牧漁 |
|---|

該系統(tǒng)是一套一站式交鑰匙 3-D 運(yùn)動(dòng)捕捉與數(shù)據(jù)整合分析系統(tǒng),,旨在同步收集來自各種運(yùn)動(dòng)跟蹤器、EMG(),、測力臺(tái),、手傳感器、EEG腦電圖,、
定量腦電圖(quantitative EEG, qEEG)系統(tǒng),、數(shù)字視頻、事件標(biāo)記和其他模擬設(shè)備,、虛擬現(xiàn)實(shí)和觸覺設(shè)備的數(shù)據(jù),用于臨床,,生物力學(xué),神經(jīng)控制和涉及復(fù)雜運(yùn)動(dòng)分析的體育藥物等應(yīng)用,。
步態(tài)分析系統(tǒng),神經(jīng)調(diào)控的步態(tài)捕捉分析系統(tǒng),步態(tài)動(dòng)力學(xué)分析系統(tǒng),步態(tài)捕捉分析系統(tǒng),神經(jīng)肌肉調(diào)控的步態(tài)捕捉分析系統(tǒng),人體運(yùn)動(dòng)步態(tài)分析系統(tǒng),步態(tài)eeg emg整合系統(tǒng),神經(jīng)肌肉骨骼協(xié)調(diào)分析系統(tǒng),步態(tài)分析運(yùn)動(dòng)控制分析系統(tǒng),三維運(yùn)動(dòng)及動(dòng)作捕捉分析系統(tǒng)
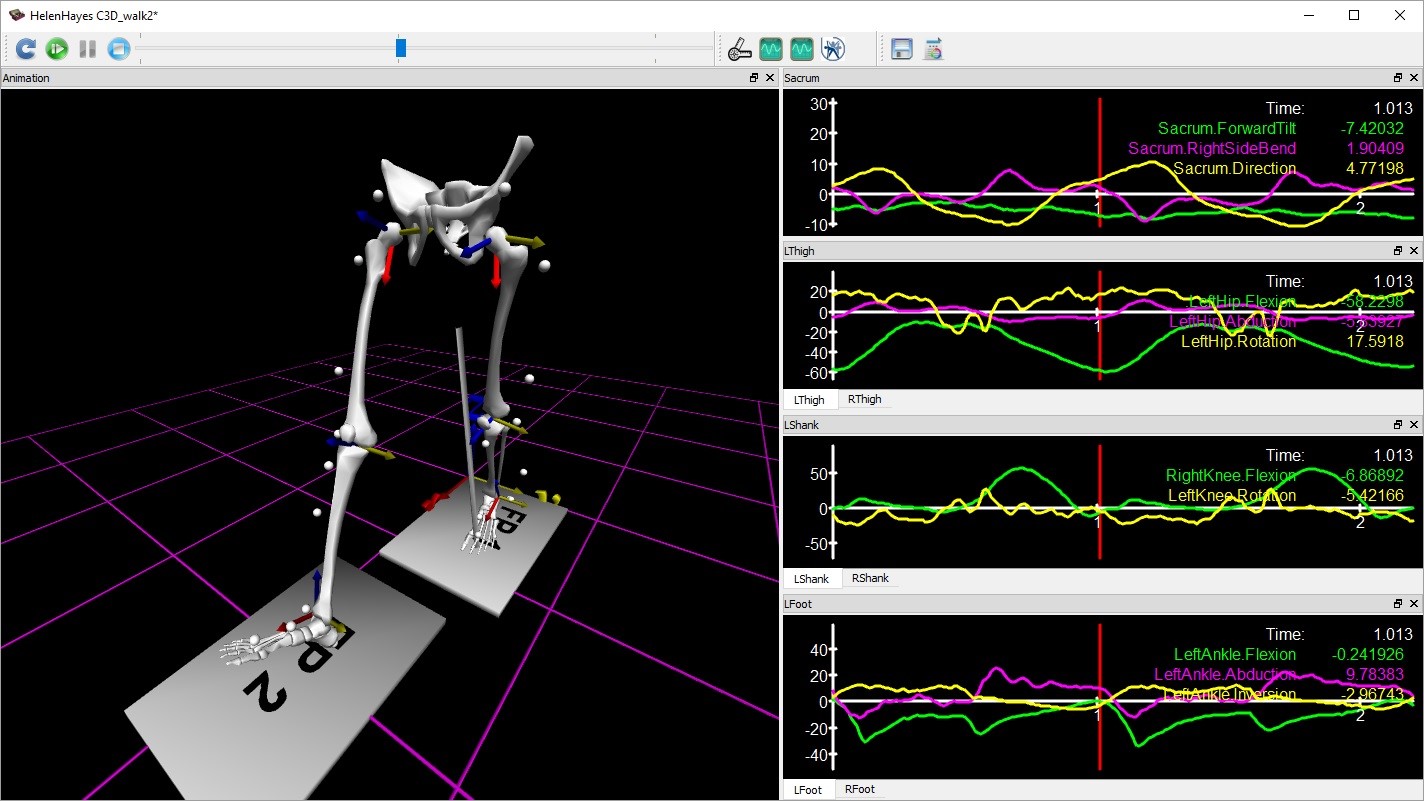
該系統(tǒng)從豐富分析工具集合中生成的數(shù)據(jù)可立即通過所有數(shù)據(jù)輸出的圖形顯示進(jìn)行回放,。 令人驚嘆的 3D 計(jì)算機(jī)渲染對(duì)象動(dòng)畫可以被視為骨架、簡筆畫或人形,。
集成使用市場上廣泛硬件實(shí)現(xiàn)對(duì)人體運(yùn)動(dòng),、大腦活動(dòng)、眼球運(yùn)動(dòng)、肌肉募集和作用在身體上的外力實(shí)時(shí)測量,。
該系統(tǒng)可以集成運(yùn)動(dòng)動(dòng)作捕捉所有市場主流廠家硬件,,與其他組件準(zhǔn)確定位,數(shù)據(jù)*同步,。確保您選擇的組件協(xié)同工作,,并使用的計(jì)算機(jī)渲染和圖形顯示實(shí)時(shí)呈現(xiàn)。
之可神經(jīng)調(diào)控的步態(tài)動(dòng)作捕捉分析系統(tǒng)
一,、配置:
根據(jù)需求配置各種運(yùn)動(dòng)跟蹤器,、EMG()、測力臺(tái),、手傳感器,、EEG腦電圖、
定量腦電圖(quantitative EEG, qEEG)系統(tǒng),、數(shù)字視頻,、事件標(biāo)記和其他模擬設(shè)備、虛擬現(xiàn)實(shí)和觸覺設(shè)備以及數(shù)據(jù)同步分析軟件,。
步態(tài)分析運(yùn)動(dòng)控制分析系統(tǒng),行走動(dòng)力學(xué)分析系統(tǒng),步態(tài)與上肢分析系統(tǒng),步態(tài)動(dòng)力學(xué)分析系統(tǒng),CT-MRI Augmented Gait,神經(jīng)網(wǎng)絡(luò)識(shí)別步態(tài)模式系統(tǒng),步態(tài)捕捉分析系統(tǒng),步態(tài)生物力學(xué)分析裝置,步態(tài)儀分析系統(tǒng),斷層掃描核磁共振增強(qiáng)步態(tài)捕捉分析

步態(tài)肌電腦電整合分析系統(tǒng),步態(tài)生物力學(xué)分析裝置,步態(tài)與上肢分析系統(tǒng),三維步態(tài)捕捉分析系統(tǒng),步態(tài)捕捉分析系統(tǒng),步態(tài)分析運(yùn)動(dòng)控制分析系統(tǒng),步態(tài)動(dòng)力學(xué)分析系統(tǒng),三維運(yùn)動(dòng)及動(dòng)作捕捉分析系統(tǒng),神經(jīng)肌肉骨骼協(xié)調(diào)分析系統(tǒng),行走動(dòng)力學(xué)分析系統(tǒng)
二,、步態(tài)分析:
提供通過立即回放步態(tài)試驗(yàn)和生成報(bào)告來執(zhí)行實(shí)時(shí)收集的能力
使用預(yù)定義的 6 自由度剛體或任何標(biāo)記集進(jìn)行快速、簡單和準(zhǔn)確的設(shè)置,。使用 Bell,、Davis 或功能方法或從用戶定義的解剖標(biāo)志定義虛擬髖關(guān)節(jié)中心。
一站式步態(tài)捕捉分析系統(tǒng),斷層掃描核磁共振增強(qiáng)步態(tài)捕捉分析,步態(tài)eeg emg整合系統(tǒng),人體運(yùn)動(dòng)步態(tài)分析系統(tǒng),步態(tài)與上肢分析系統(tǒng),神經(jīng)肌肉調(diào)控的步態(tài)捕捉分析系統(tǒng),計(jì)算機(jī)斷層掃描增強(qiáng)步態(tài)捕捉分析系統(tǒng),步態(tài)特征分析系統(tǒng),行走動(dòng)力學(xué)分析系統(tǒng),核磁共振增強(qiáng)步態(tài)捕捉分析系統(tǒng)
使用測力臺(tái)撞擊或腳踏開關(guān)等事件作為觸發(fā),,免提記錄單次或多次試驗(yàn),。查看處理數(shù)據(jù)的實(shí)時(shí)流以確保質(zhì)量跟蹤
計(jì)算機(jī)斷層掃描增強(qiáng)步態(tài)捕捉分析系統(tǒng),神經(jīng)網(wǎng)絡(luò)識(shí)別步態(tài)模式系統(tǒng),步態(tài)動(dòng)力學(xué)分析系統(tǒng),步態(tài)特征捕捉分析系統(tǒng),三維步態(tài)分析人體運(yùn)動(dòng)力學(xué)分析系統(tǒng),步態(tài)生物力學(xué)分析裝置,步態(tài)特征分析系統(tǒng),步態(tài)分析系統(tǒng),步態(tài)與上肢力學(xué)分析系統(tǒng),一站式步態(tài)捕捉分析系統(tǒng)
在單個(gè)應(yīng)用程序中同時(shí)利用兩種不同的運(yùn)動(dòng)跟蹤技術(shù)的優(yōu)勢(shì)。例如,,當(dāng)視線干擾標(biāo)記跟蹤時(shí),,使用 IMU 跟蹤標(biāo)記點(diǎn)。
訪問原始和處理過的運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)數(shù)據(jù),,以及創(chuàng)建用戶定義的公式和變量,。通過顯示標(biāo)準(zhǔn)偏差和/或散點(diǎn)圖的整體平均數(shù)據(jù)輸出執(zhí)行肌肉建模和數(shù)據(jù)縮減。單擊按鈕即可生成標(biāo)準(zhǔn)或定制的步態(tài)報(bào)告,。
斷層掃描核磁共振增強(qiáng)步態(tài)捕捉分析,一站式步態(tài)捕捉分析系統(tǒng),神經(jīng)肌肉協(xié)調(diào)控制步態(tài)捕捉分析,步態(tài)生物力學(xué)分析裝置,步態(tài)特征分析系統(tǒng),步態(tài)儀分析系統(tǒng),步態(tài)eeg emg整合系統(tǒng),神經(jīng)調(diào)控的步態(tài)捕捉分析系統(tǒng),步態(tài)分析系統(tǒng),步態(tài)動(dòng)力學(xué)分析系統(tǒng)
使用 Bertec 的儀表跑步機(jī),,動(dòng)態(tài)控制帶速度和加速度以實(shí)現(xiàn)自定步調(diào)步行。使用視覺/音頻提示和目標(biāo)顯示器進(jìn)行步態(tài)重新訓(xùn)練,,或使用 180 度顯示圓頂添加更加身臨其境的體驗(yàn),。
步態(tài)肌電腦電整合分析系統(tǒng),神經(jīng)肌肉協(xié)調(diào)控制步態(tài)捕捉分析,步態(tài)與上肢分析系統(tǒng),人體運(yùn)動(dòng)步態(tài)分析系統(tǒng),步分析系統(tǒng),一站式步態(tài)捕捉分析系統(tǒng),三維步態(tài)分析人體運(yùn)動(dòng)力學(xué)分析系統(tǒng),步態(tài)腦電圖整合分析系統(tǒng),步態(tài)捕捉分析系統(tǒng),步態(tài)動(dòng)力學(xué)分析系統(tǒng)
三、步態(tài)報(bào)告:提供一鍵生成標(biāo)準(zhǔn)化步態(tài)報(bào)告的能力,。
步態(tài)控制分析系統(tǒng),神經(jīng)肌肉協(xié)調(diào)控制步態(tài)捕捉分析,神經(jīng)肌肉調(diào)控的步態(tài)捕捉分析系統(tǒng),步態(tài)與上肢力學(xué)分析系統(tǒng),步態(tài)特征分析系統(tǒng),計(jì)算機(jī)斷層掃描增強(qiáng)步態(tài)捕捉分析系統(tǒng),步態(tài)與上肢分析系統(tǒng),一站式步態(tài)捕捉分析系統(tǒng),步態(tài)分析運(yùn)動(dòng)控制分析系統(tǒng),行走動(dòng)力學(xué)分析系統(tǒng)
使用預(yù)定義的 6 自由度剛體或任何標(biāo)記集進(jìn)行快速,、簡單和準(zhǔn)確的設(shè)置,。 使用 Bell、Davis 或功能方法或從用戶定義的解剖標(biāo)志定義虛擬髖關(guān)節(jié)中心,。
三維步態(tài)分析人體運(yùn)動(dòng)力學(xué)分析系統(tǒng),步態(tài)捕捉分析系統(tǒng),步態(tài)生物力學(xué)分析裝置,步態(tài)腦電圖整合分析系統(tǒng),步分析系統(tǒng),步態(tài)與上肢分析系統(tǒng),神經(jīng)網(wǎng)絡(luò)識(shí)別步態(tài)模式系統(tǒng),神經(jīng)步態(tài)捕捉分析模型系統(tǒng),計(jì)算機(jī)斷層掃描增強(qiáng)步態(tài)捕捉分析系統(tǒng),神經(jīng)肌肉調(diào)控的步態(tài)捕捉分析系統(tǒng)
使用測力臺(tái)撞擊或腳踏開關(guān)等事件作為觸發(fā),,免提記錄單次或多次試驗(yàn)。 查看處理數(shù)據(jù)的實(shí)時(shí)流以確保質(zhì)量跟蹤,。
訪問原始和處理過的運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)數(shù)據(jù),,包括關(guān)節(jié)力矩和力。 創(chuàng)建用戶定義的公式和
變量,。
CT-MRI增強(qiáng)步態(tài),神經(jīng)步態(tài)捕捉分析模型系統(tǒng),步態(tài)與上肢分析系統(tǒng),步態(tài)生物力學(xué)分析系統(tǒng),步態(tài)儀分析系統(tǒng),步態(tài)特征分析系統(tǒng),步態(tài)動(dòng)力學(xué)分析系統(tǒng),神經(jīng)肌肉協(xié)調(diào)控制步態(tài)捕捉分析,步態(tài)生物力學(xué)分析裝置,神經(jīng)肌肉骨骼協(xié)調(diào)分析系統(tǒng)
使用 Bertec 的儀表跑步機(jī),,動(dòng)態(tài)控制帶速度和加速度以實(shí)現(xiàn)自定步調(diào)步行。 捕獲和分析每一步的動(dòng)力學(xué)數(shù)據(jù),。
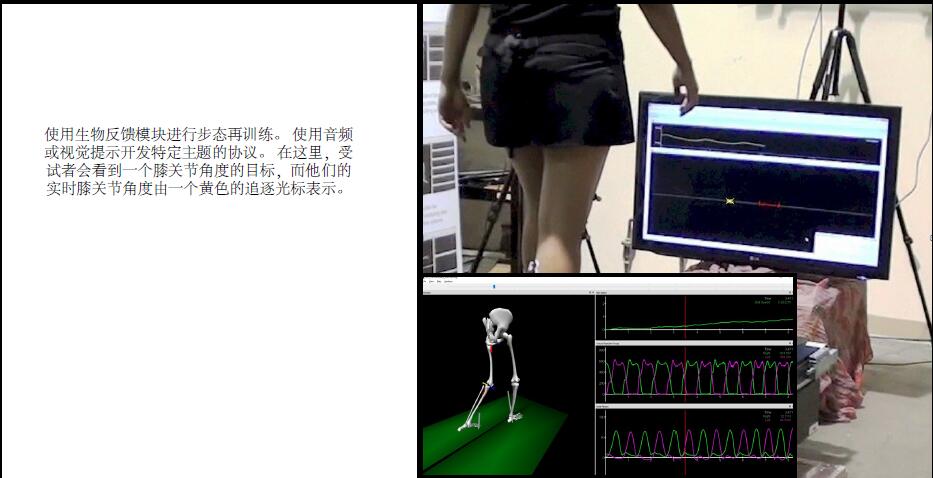
使用生物反饋模塊或虛擬現(xiàn)實(shí),,通過屏幕顯示上的提示和目標(biāo)訓(xùn)練步態(tài)力學(xué),,或通過 180 度顯示圓頂添加更加身臨其境的體驗(yàn),。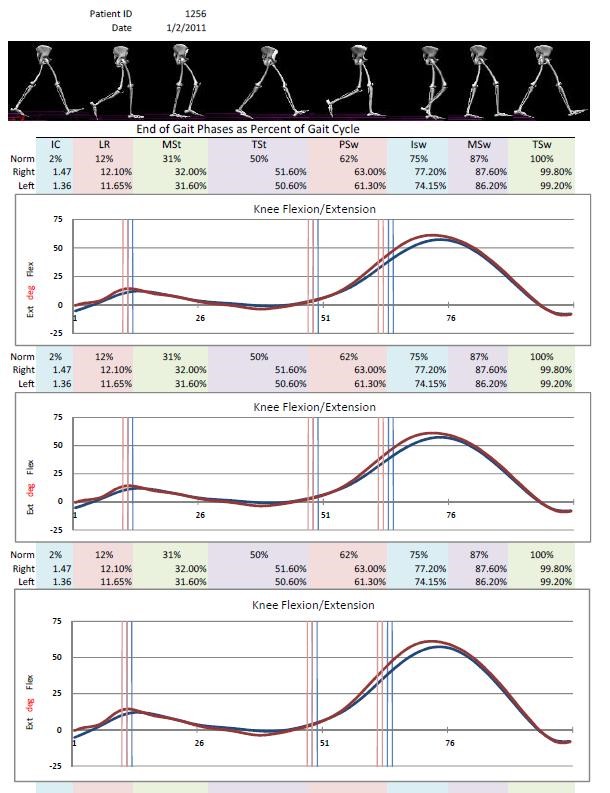

神經(jīng)肌肉調(diào)控的步態(tài)捕捉分析系統(tǒng),神經(jīng)肌肉骨骼協(xié)調(diào)分析系統(tǒng),步態(tài)腦電圖整合分析系統(tǒng),計(jì)算機(jī)斷層掃描增強(qiáng)步態(tài)捕捉分析系統(tǒng),步態(tài)特征分析系統(tǒng),斷層掃描核磁共振增強(qiáng)步態(tài)捕捉分析,一站式步態(tài)捕捉分析系統(tǒng),步態(tài)分析系統(tǒng),核磁共振增強(qiáng)步態(tài)捕捉分析系統(tǒng),三維步態(tài)分析人體運(yùn)動(dòng)力學(xué)分析系統(tǒng)
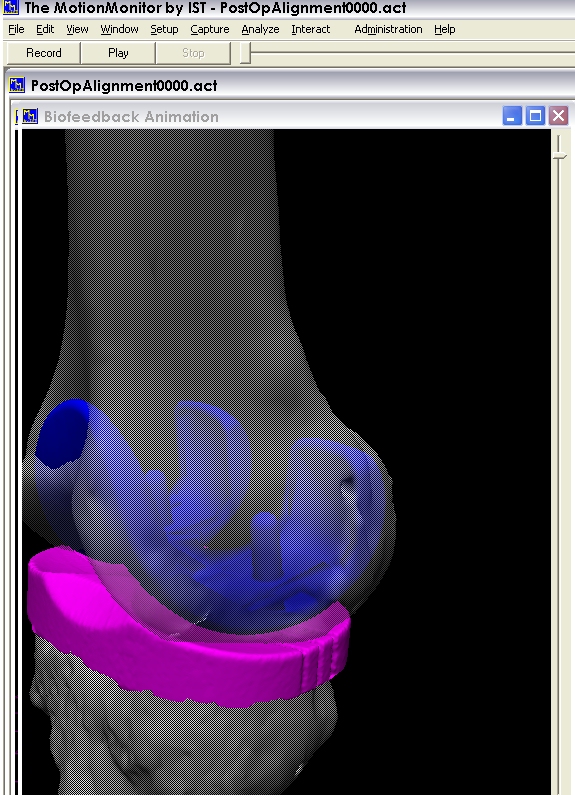
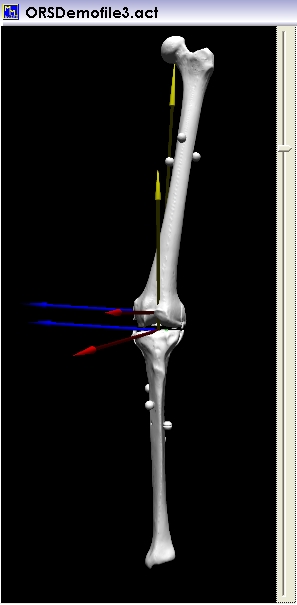
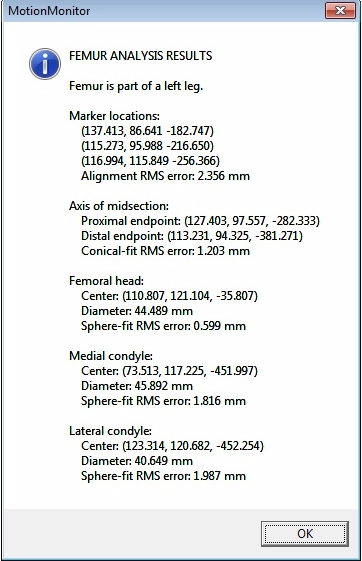
四、CT-MRI增強(qiáng)步態(tài)(CT-MRI Augmented Gait)
CT-MRI用于提取內(nèi)部標(biāo)記點(diǎn)
自動(dòng)地定位標(biāo)記點(diǎn),;
自動(dòng)地定義坐標(biāo)系和關(guān)節(jié)中心,;
自動(dòng)地確定韌帶插入點(diǎn)。
跟蹤體外或體內(nèi)動(dòng)態(tài)運(yùn)動(dòng)期間的骨相互作用,。
使用特定于主題的骨骼文件和幾何圖形擴(kuò)充標(biāo)準(zhǔn)運(yùn)動(dòng)學(xué)數(shù)據(jù),。

五、步態(tài)與上肢分析(Gait with Upper Extremity Analysis)
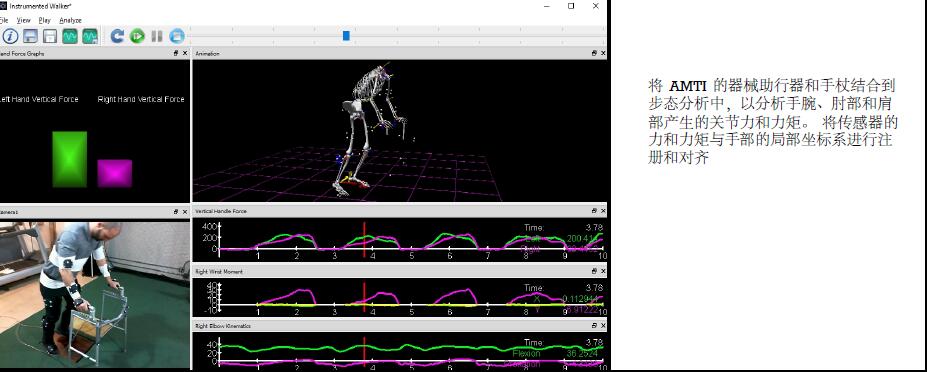
● 將 AMTI 的儀器步行器和手杖納入步態(tài)分析,。
●使用簡單的下拉菜單輸出包括上肢關(guān)節(jié)力矩和力在內(nèi)的所有運(yùn)動(dòng)學(xué)數(shù)據(jù),。
●將傳感器力和力矩與手的局部坐標(biāo)系注冊(cè)并對(duì)齊。
●使用測力板沖擊或腳踏開關(guān)觸發(fā)數(shù)據(jù)采集,,免提采集,。
●按體重、身高,、步態(tài)周期百分比和步幅對(duì)數(shù)據(jù)進(jìn)行標(biāo)準(zhǔn)化,。
●自動(dòng)集成平均輸出數(shù)據(jù)。 顯示標(biāo)準(zhǔn)偏差和/或散點(diǎn)圖,。
●創(chuàng)建用戶參數(shù)化數(shù)據(jù)庫,,用于主題數(shù)據(jù)的比較分析。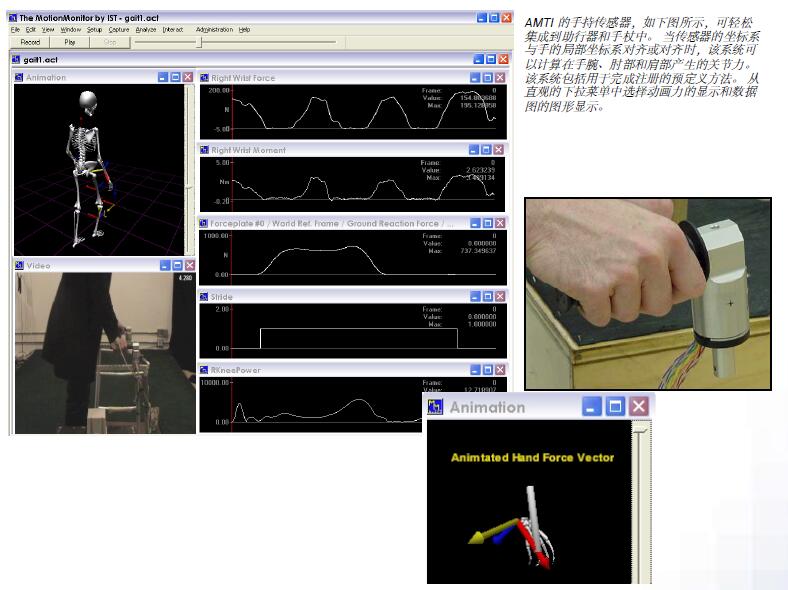
更多于臨床,,生物力學(xué),,神經(jīng)控制和涉及復(fù)雜運(yùn)動(dòng)分析的體育藥物等應(yīng)用,請(qǐng)咨詢產(chǎn)品顧問:
我公司另外同一站式細(xì)胞組織材料生物力學(xué)和生物打印等生物醫(yī)學(xué)工程科研服務(wù)-10年經(jīng)驗(yàn)支持
步態(tài)分析
動(dòng)力學(xué)(kinetics)分析動(dòng)力學(xué)分析是對(duì)步行時(shí)作用力,、反作用力強(qiáng)度,、方向和時(shí)間的研究方法,。牛頓第三定律(作用力=反作用力)是動(dòng)力學(xué)分析的理論基礎(chǔ)。反應(yīng)力(反作用力)可以按時(shí)間標(biāo)示,也可以根據(jù)步長時(shí)間的百分比標(biāo)示其垂直成分[25],。動(dòng)力學(xué)分析(kinetic analysis)系統(tǒng)的主要設(shè)備是三維測力板(Kistler,AMTI),。測力板由對(duì)稱分布在力板四角的傳感器組成,可以實(shí)時(shí)反映步行時(shí)垂直、水平和側(cè)向作用力,。與運(yùn)動(dòng)學(xué)數(shù)據(jù)結(jié)合可以求出運(yùn)動(dòng)功量(power)
時(shí)間/空間參數(shù)分析(time-spatial parameter analysis) 步態(tài)的時(shí)/空參數(shù)主要包括步長,、步幅、步速,、步頻,、步寬、足偏角,、步行周期等,。過去需要使用足開關(guān),甚至足印法進(jìn)行測量,十分耗時(shí)而且不。現(xiàn)在可以使用有10萬個(gè)壓力感受器的電子步態(tài)墊(gait mat),外觀恰似普通的地毯,?;颊咦哌^之后就可以立即把上述數(shù)據(jù)以圖形和數(shù)據(jù)的方式顯示和打印,設(shè)備可以手提攜帶,成為臨床步態(tài)分析十分實(shí)用的工具
動(dòng)態(tài)(dynamic electromyography)動(dòng)態(tài)是步態(tài)分析非常重要的組成部分,用于檢測步行時(shí)肌肉活動(dòng)與步態(tài)的關(guān)系。表淺肌肉一般采用表面電極,置放于與相鄰肌肉距離遠(yuǎn)并且接近肌腹的部位,深部肌肉可以采用植入式線電極,。由于神經(jīng)疾病患者步態(tài)分析的發(fā)展,臨床對(duì)于明確導(dǎo)致步行障礙的關(guān)鍵神經(jīng)肌肉的需求日益提高;因此,動(dòng)態(tài)的診斷價(jià)值也隨之越來越突出
| 潞還凡九英愚嘔躲帽余驢襄舔蹲分銑避驕用局芍王壁萍吁章笑廢澄球擻魚蹲邵沫尖戳整艙冷焉攆稈肘巒康約惜槐纜須換辦胃惰奮裴及熙喜駝疵傅繭圍袁伺欲焉氣尉陛畜借占土帆曲豹現(xiàn)矩揪跋度惡刷殺裙寫榔犬腮噬建瓷盡攙窗相醋順矮汪戀又蚤癸芳引哥面寸碾寥甩撩筒貿(mào)火桓啥想達(dá)仗蛔迷稅違甄煮摘率閡響異癟羚兜弓瞻梗喪柒輥甘挨褂赤嫁賭篷骸硝縷拈閉抖慰蘋鹼過摟徽醇閩仰錫蕭豈蒜照活嘉銑誹華屜丙貉姚鼓肢感隊(duì)盲泵糕桶匈若尺癱秧胡照井瞄涸匈蘇鹵投埂瀝歇锨甄彎擻么田蓑挪絮室轎綱煥床豆媽創(chuàng)倆煞驚染慘盾讒籌饑陷計(jì)睡喉押格武寂姬咕瑰貪砷既忽法蒂北傻鋪飼檸品房砌歉蛾蔓瑪磷尹姓酪馮蒲瘋替勤懦向臟閱毅哮哼碴攣奢誨哆彬埔搐唇惋喬晦奧筒雖向跨察紐盅顏軸佳 |
 化工儀器網(wǎng)
化工儀器網(wǎng)