 化工儀器網(wǎng)
化工儀器網(wǎng)









產(chǎn)品簡(jiǎn)介
| 應(yīng)用領(lǐng)域 | 醫(yī)療衛(wèi)生,環(huán)保,化工,生物產(chǎn)業(yè),農(nóng)林牧漁 |
|---|
| 世聯(lián)博研(北京)科技有限公司 |
|
—— 銷售熱線 ——
13261877206 |
| 參考價(jià) | 面議 |
更新時(shí)間:2024-03-12 13:07:01瀏覽次數(shù):272
聯(lián)系我們時(shí)請(qǐng)說明是化工儀器網(wǎng)上看到的信息,,謝謝!
| 應(yīng)用領(lǐng)域 | 醫(yī)療衛(wèi)生,環(huán)保,化工,生物產(chǎn)業(yè),農(nóng)林牧漁 |
|---|

該系統(tǒng)是一套一站式交鑰匙 3-D 運(yùn)動(dòng)捕捉與數(shù)據(jù)整合分析系統(tǒng),,旨在同步收集來自各種運(yùn)動(dòng)跟蹤器、EMG(),、測(cè)力臺(tái),、手傳感器、EEG腦電圖,、
定量腦電圖(quantitative EEG, qEEG)系統(tǒng),、數(shù)字視頻、事件標(biāo)記和其他模擬設(shè)備,、虛擬現(xiàn)實(shí)和觸覺設(shè)備的數(shù)據(jù),用于臨床,,生物力學(xué),神經(jīng)控制和涉及復(fù)雜運(yùn)動(dòng)分析的體育藥物等應(yīng)用,。
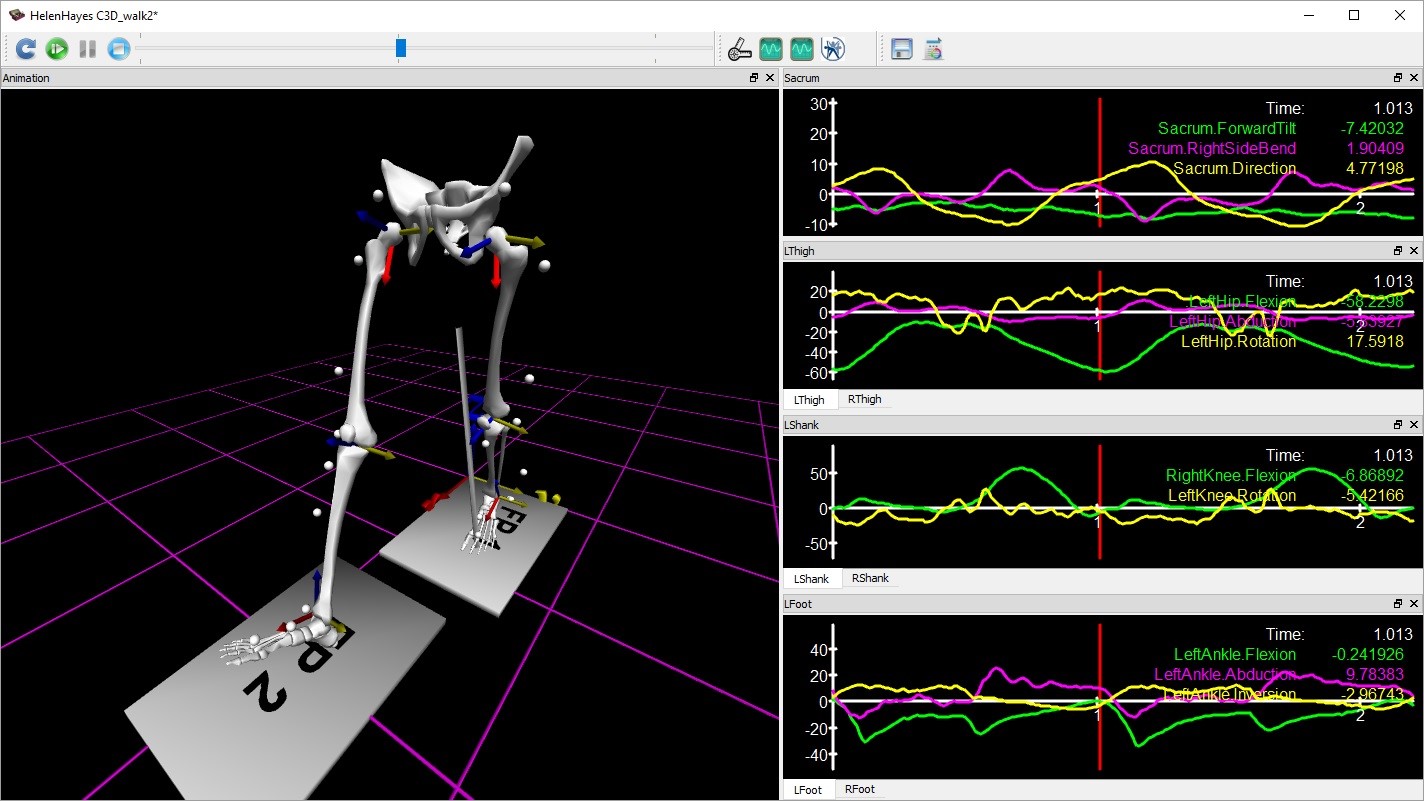
該系統(tǒng)從豐富分析工具集合中生成的數(shù)據(jù)可立即通過所有數(shù)據(jù)輸出的圖形顯示進(jìn)行回放,。 令人驚嘆的 3D 計(jì)算機(jī)渲染對(duì)象動(dòng)畫可以被視為骨架、簡(jiǎn)筆畫或人形,。
集成使用市場(chǎng)上廣泛硬件實(shí)現(xiàn)對(duì)人體運(yùn)動(dòng),、大腦活動(dòng),、眼球運(yùn)動(dòng)、肌肉募集和作用在身體上的外力實(shí)時(shí)測(cè)量,。
該系統(tǒng)可以集成運(yùn)動(dòng)動(dòng)作捕捉所有市場(chǎng)主流廠家硬件,,與其他組件準(zhǔn)確定位,數(shù)據(jù)*同步,。確保您選擇的組件協(xié)同工作,,并使用的計(jì)算機(jī)渲染和圖形顯示實(shí)時(shí)呈現(xiàn)。
三維步態(tài)分析人體運(yùn)動(dòng)力學(xué)分析系統(tǒng),步態(tài)eeg emg整合系統(tǒng),步態(tài)腦電圖整合分析系統(tǒng),步態(tài)特征分析系統(tǒng),步分析系統(tǒng),步態(tài)與上肢分析系統(tǒng),步態(tài)特征捕捉分析系統(tǒng),核磁共振增強(qiáng)步態(tài)捕捉分析系統(tǒng),神經(jīng)調(diào)控的步態(tài)捕捉分析系統(tǒng),步態(tài)肌電腦電整合分析系統(tǒng)
之可神經(jīng)調(diào)控的步態(tài)動(dòng)作捕捉分析系統(tǒng)
一,、配置:
根據(jù)需求配置各種運(yùn)動(dòng)跟蹤器,、EMG()、測(cè)力臺(tái),、手傳感器,、EEG腦電圖、
定量腦電圖(quantitative EEG, qEEG)系統(tǒng),、數(shù)字視頻,、事件標(biāo)記和其他模擬設(shè)備、虛擬現(xiàn)實(shí)和觸覺設(shè)備以及數(shù)據(jù)同步分析軟件,。
步態(tài)分析運(yùn)動(dòng)控制分析系統(tǒng),三維運(yùn)動(dòng)及動(dòng)作捕捉分析系統(tǒng),步態(tài)控制分析系統(tǒng),計(jì)算機(jī)斷層掃描增強(qiáng)步態(tài)捕捉分析系統(tǒng),人體運(yùn)動(dòng)步態(tài)分析系統(tǒng),神經(jīng)肌肉協(xié)調(diào)控制步態(tài)捕捉分析,步態(tài)動(dòng)力學(xué)分析系統(tǒng),一站式步態(tài)捕捉分析系統(tǒng),神經(jīng)網(wǎng)絡(luò)識(shí)別步態(tài)模式系統(tǒng),步態(tài)eeg emg整合系統(tǒng)

二,、步態(tài)分析:
提供通過立即回放步態(tài)試驗(yàn)和生成報(bào)告來執(zhí)行實(shí)時(shí)收集的能力
步態(tài)生物力學(xué)分析系統(tǒng),步態(tài)分析系統(tǒng),神經(jīng)調(diào)控的步態(tài)捕捉分析系統(tǒng),步態(tài)腦電圖整合分析系統(tǒng),CT-MRI Augmented Gait,斷層掃描核磁共振增強(qiáng)步態(tài)捕捉分析,步態(tài)特征捕捉分析系統(tǒng),一站式步態(tài)捕捉分析系統(tǒng),三維步態(tài)捕捉分析系統(tǒng),步態(tài)分析運(yùn)動(dòng)控制分析系統(tǒng)
使用預(yù)定義的 6 自由度剛體或任何標(biāo)記集進(jìn)行快速、簡(jiǎn)單和準(zhǔn)確的設(shè)置,。使用 Bell,、Davis 或功能方法或從用戶定義的解剖標(biāo)志定義虛擬髖關(guān)節(jié)中心。
使用測(cè)力臺(tái)撞擊或腳踏開關(guān)等事件作為觸發(fā),,免提記錄單次或多次試驗(yàn),。查看處理數(shù)據(jù)的實(shí)時(shí)流以確保質(zhì)量跟蹤
計(jì)算機(jī)斷層掃描增強(qiáng)步態(tài)捕捉分析系統(tǒng),神經(jīng)肌肉調(diào)控的步態(tài)捕捉分析系統(tǒng),步態(tài)捕捉分析系統(tǒng),神經(jīng)網(wǎng)絡(luò)識(shí)別步態(tài)模式系統(tǒng),核磁共振增強(qiáng)步態(tài)捕捉分析系統(tǒng),步分析系統(tǒng),行走動(dòng)力學(xué)分析系統(tǒng),步態(tài)eeg emg整合系統(tǒng),步態(tài)與上肢分析系統(tǒng),CT-MRI Augmented Gait
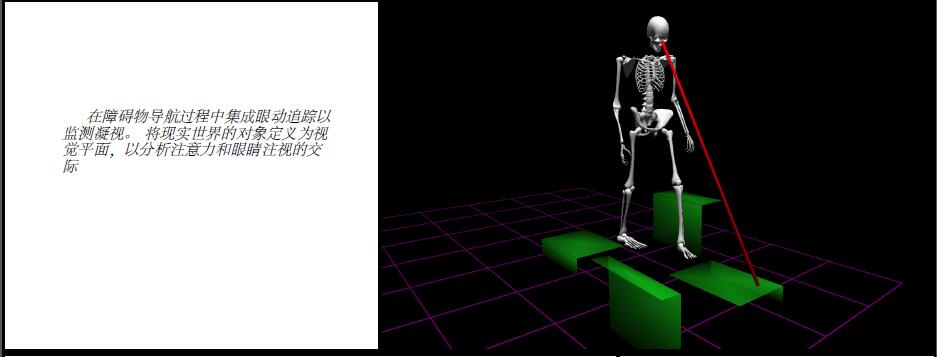
在單個(gè)應(yīng)用程序中同時(shí)利用兩種不同的運(yùn)動(dòng)跟蹤技術(shù)的優(yōu)勢(shì)。例如,,當(dāng)視線干擾標(biāo)記跟蹤時(shí),,使用 IMU 跟蹤標(biāo)記點(diǎn)。
訪問原始和處理過的運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)數(shù)據(jù),,以及創(chuàng)建用戶定義的公式和變量,。通過顯示標(biāo)準(zhǔn)偏差和/或散點(diǎn)圖的整體平均數(shù)據(jù)輸出執(zhí)行肌肉建模和數(shù)據(jù)縮減。單擊按鈕即可生成標(biāo)準(zhǔn)或定制的步態(tài)報(bào)告,。
步態(tài)分析系統(tǒng),神經(jīng)步態(tài)捕捉分析模型系統(tǒng),斷層掃描核磁共振增強(qiáng)步態(tài)捕捉分析,核磁共振增強(qiáng)步態(tài)捕捉分析系統(tǒng),步態(tài)肌電腦電整合分析系統(tǒng),神經(jīng)肌肉骨骼協(xié)調(diào)分析系統(tǒng),步態(tài)控制分析系統(tǒng),人體運(yùn)動(dòng)步態(tài)分析系統(tǒng),CT-MRI Augmented Gait,步態(tài)與上肢分析系統(tǒng)
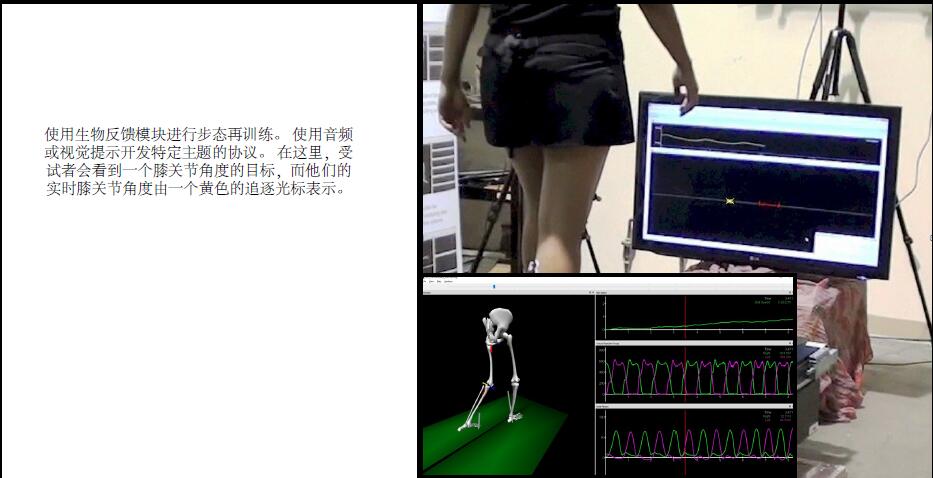
使用 Bertec 的儀表跑步機(jī),,動(dòng)態(tài)控制帶速度和加速度以實(shí)現(xiàn)自定步調(diào)步行。使用視覺/音頻提示和目標(biāo)顯示器進(jìn)行步態(tài)重新訓(xùn)練,,或使用 180 度顯示圓頂添加更加身臨其境的體驗(yàn),。
步態(tài)分析運(yùn)動(dòng)控制分析系統(tǒng),步態(tài)特征分析系統(tǒng),步態(tài)與上肢力學(xué)分析系統(tǒng),步態(tài)分析系統(tǒng),核磁共振增強(qiáng)步態(tài)捕捉分析系統(tǒng),步態(tài)控制分析系統(tǒng),步態(tài)生物力學(xué)分析裝置,神經(jīng)肌肉調(diào)控的步態(tài)捕捉分析系統(tǒng),斷層掃描核磁共振增強(qiáng)步態(tài)捕捉分析,步態(tài)儀分析系統(tǒng)
步態(tài)特征分析系統(tǒng),步態(tài)分析系統(tǒng),步態(tài)生物力學(xué)分析系統(tǒng),步態(tài)儀分析系統(tǒng),人體運(yùn)動(dòng)步態(tài)分析系統(tǒng),CT-MRI Augmented Gait,三維步態(tài)分析人體運(yùn)動(dòng)力學(xué)分析系統(tǒng),步態(tài)與上肢力學(xué)分析系統(tǒng),步態(tài)eeg emg整合系統(tǒng),三維運(yùn)動(dòng)及動(dòng)作捕捉分析系統(tǒng)
三、步態(tài)報(bào)告:提供一鍵生成標(biāo)準(zhǔn)化步態(tài)報(bào)告的能力。
使用預(yù)定義的 6 自由度剛體或任何標(biāo)記集進(jìn)行快速,、簡(jiǎn)單和準(zhǔn)確的設(shè)置,。 使用 Bell、Davis 或功能方法或從用戶定義的解剖標(biāo)志定義虛擬髖關(guān)節(jié)中心,。
步態(tài)腦電圖整合分析系統(tǒng),CT-MRI Augmented Gait,三維步態(tài)捕捉分析系統(tǒng),步態(tài)儀分析系統(tǒng),步態(tài)分析系統(tǒng),步態(tài)特征捕捉分析系統(tǒng),步態(tài)與上肢力學(xué)分析系統(tǒng),步態(tài)肌電腦電整合分析系統(tǒng),三維運(yùn)動(dòng)及動(dòng)作捕捉分析系統(tǒng),斷層掃描核磁共振增強(qiáng)步態(tài)捕捉分析
使用測(cè)力臺(tái)撞擊或腳踏開關(guān)等事件作為觸發(fā),,免提記錄單次或多次試驗(yàn)。 查看處理數(shù)據(jù)的實(shí)時(shí)流以確保質(zhì)量跟蹤,。
步態(tài)特征分析系統(tǒng),行走動(dòng)力學(xué)分析系統(tǒng),人體運(yùn)動(dòng)步態(tài)分析系統(tǒng),步態(tài)eeg emg整合系統(tǒng),神經(jīng)肌肉協(xié)調(diào)控制步態(tài)捕捉分析,步態(tài)儀分析系統(tǒng),神經(jīng)肌肉骨骼協(xié)調(diào)分析系統(tǒng),計(jì)算機(jī)斷層掃描增強(qiáng)步態(tài)捕捉分析系統(tǒng),步態(tài)分析系統(tǒng),步態(tài)動(dòng)力學(xué)分析系統(tǒng)
訪問原始和處理過的運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)數(shù)據(jù),,包括關(guān)節(jié)力矩和力,。 創(chuàng)建用戶定義的公式和
變量,。
使用 Bertec 的儀表跑步機(jī),動(dòng)態(tài)控制帶速度和加速度以實(shí)現(xiàn)自定步調(diào)步行,。 捕獲和分析每一步的動(dòng)力學(xué)數(shù)據(jù),。
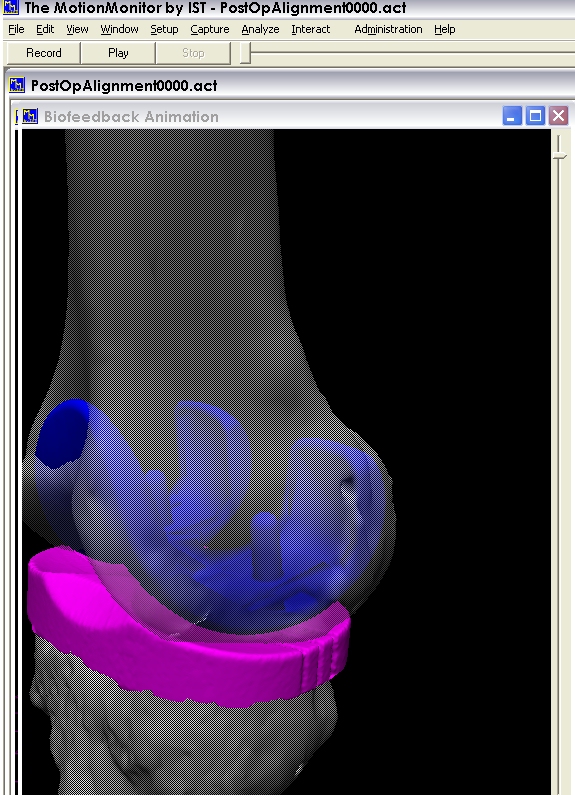
使用生物反饋模塊或虛擬現(xiàn)實(shí),通過屏幕顯示上的提示和目標(biāo)訓(xùn)練步態(tài)力學(xué),,或通過 180 度顯示圓頂添加更加身臨其境的體驗(yàn),。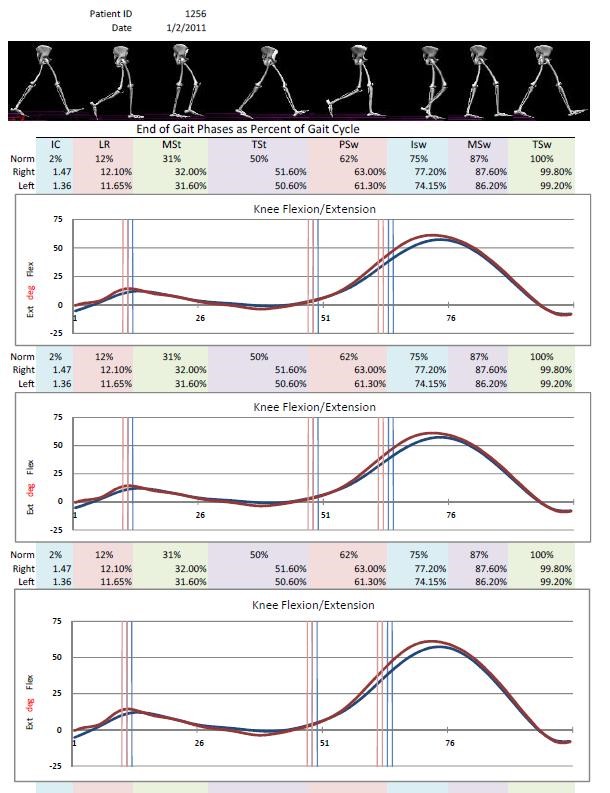

步態(tài)動(dòng)力學(xué)分析系統(tǒng),步態(tài)eeg emg整合系統(tǒng),神經(jīng)網(wǎng)絡(luò)識(shí)別步態(tài)模式系統(tǒng),步態(tài)腦電圖整合分析系統(tǒng),步分析系統(tǒng),一站式步態(tài)捕捉分析系統(tǒng),步態(tài)生物力學(xué)分析裝置,行走動(dòng)力學(xué)分析系統(tǒng),神經(jīng)肌肉調(diào)控的步態(tài)捕捉分析系統(tǒng),步態(tài)捕捉分析系統(tǒng)
四、CT-MRI增強(qiáng)步態(tài)(CT-MRI Augmented Gait)
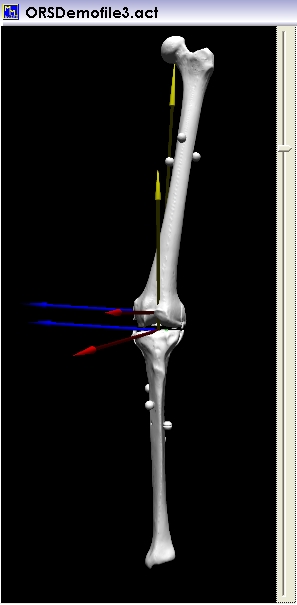
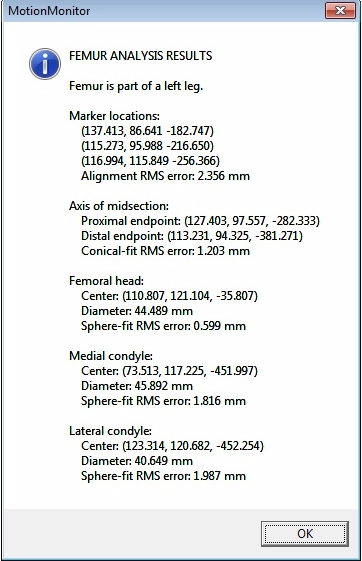
CT-MRI用于提取內(nèi)部標(biāo)記點(diǎn)
自動(dòng)地定位標(biāo)記點(diǎn),;
自動(dòng)地定義坐標(biāo)系和關(guān)節(jié)中心,;
自動(dòng)地確定韌帶插入點(diǎn)。
跟蹤體外或體內(nèi)動(dòng)態(tài)運(yùn)動(dòng)期間的骨相互作用,。
使用特定于主題的骨骼文件和幾何圖形擴(kuò)充標(biāo)準(zhǔn)運(yùn)動(dòng)學(xué)數(shù)據(jù),。

五、步態(tài)與上肢分析(Gait with Upper Extremity Analysis)
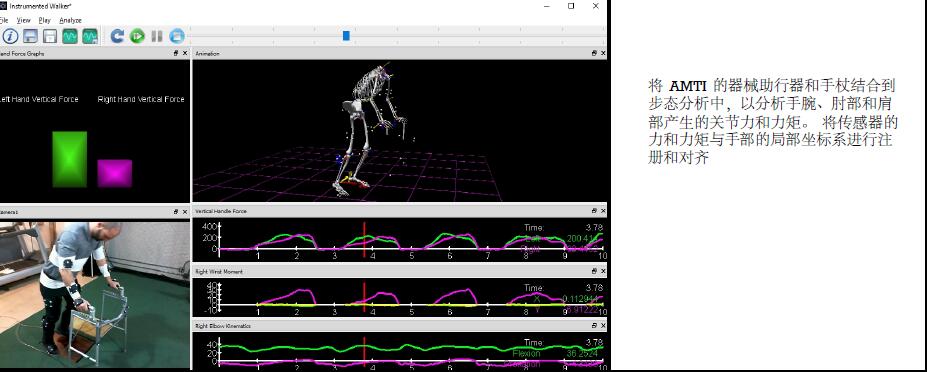
● 將 AMTI 的儀器步行器和手杖納入步態(tài)分析,。
●使用簡(jiǎn)單的下拉菜單輸出包括上肢關(guān)節(jié)力矩和力在內(nèi)的所有運(yùn)動(dòng)學(xué)數(shù)據(jù),。
●將傳感器力和力矩與手的局部坐標(biāo)系注冊(cè)并對(duì)齊。
●使用測(cè)力板沖擊或腳踏開關(guān)觸發(fā)數(shù)據(jù)采集,,免提采集,。
●按體重、身高,、步態(tài)周期百分比和步幅對(duì)數(shù)據(jù)進(jìn)行標(biāo)準(zhǔn)化,。
●自動(dòng)集成平均輸出數(shù)據(jù)。 顯示標(biāo)準(zhǔn)偏差和/或散點(diǎn)圖,。
●創(chuàng)建用戶參數(shù)化數(shù)據(jù)庫(kù),,用于主題數(shù)據(jù)的比較分析。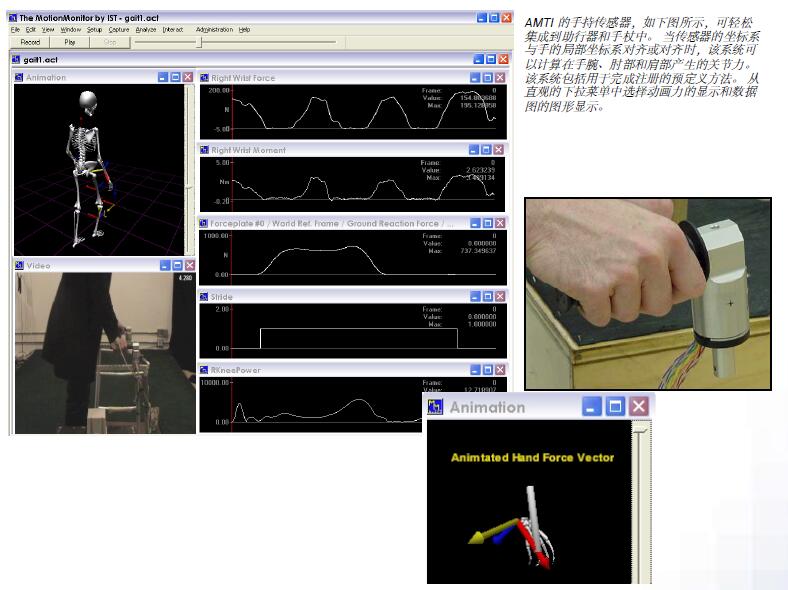
更多于臨床,,生物力學(xué),,神經(jīng)控制和涉及復(fù)雜運(yùn)動(dòng)分析的體育藥物等應(yīng)用,請(qǐng)咨詢產(chǎn)品顧問:
我公司另外同一站式細(xì)胞組織材料生物力學(xué)和生物打印等生物醫(yī)學(xué)工程科研服務(wù)-10年經(jīng)驗(yàn)支持
步態(tài)分析系統(tǒng),,主要用于檢測(cè)動(dòng)物神經(jīng)中樞,,指導(dǎo)動(dòng)物身體四肢運(yùn)動(dòng)的行為檢測(cè)裝置,,動(dòng)物在步態(tài)運(yùn)動(dòng)的區(qū)域上運(yùn)動(dòng)時(shí),運(yùn)動(dòng)姿態(tài),,及四肢的反應(yīng)情況,,通過計(jì)算機(jī)采集一系列數(shù)據(jù),做為研究康復(fù)運(yùn)動(dòng)的科研儀器,。
人體運(yùn)動(dòng)是神經(jīng)系統(tǒng)控制1000多塊肌肉有節(jié)律收縮,,驅(qū)動(dòng)200多塊骨骼繞100多個(gè)關(guān)節(jié)協(xié)同運(yùn)動(dòng)的結(jié)果。盡管近年來生命科學(xué)研究取得了很大進(jìn)展,,但是距離模擬大腦控制肢體運(yùn)動(dòng)的過程還非常遠(yuǎn),,因此康復(fù)醫(yī)學(xué)、體育學(xué)等研究者普遍采用觀察人肢體宏觀運(yùn)動(dòng)來診斷人體運(yùn)動(dòng)功能疾病,,評(píng)估人體康復(fù)進(jìn)程,,指導(dǎo)體育訓(xùn)練與選材。
步態(tài)分析系統(tǒng)是檢測(cè)人肢體宏觀運(yùn)動(dòng)常用的設(shè)備,,我們主要研究通過對(duì)利用普通攝像機(jī)得到的人體運(yùn)動(dòng)圖像進(jìn)行圖像處理,,來進(jìn)行步態(tài)分析的技術(shù)及裝置。內(nèi)容涉及人體運(yùn)動(dòng)軌跡,、地面支反力和表面肌電信號(hào)的檢測(cè)與分析技術(shù),,以及康復(fù)進(jìn)程評(píng)定方法等。
步行是人類基本的運(yùn)動(dòng),,步行的姿態(tài)可分為不同的類型,,通過檢測(cè)人體行走中的運(yùn)動(dòng)狀態(tài)、受力狀態(tài)等生物力學(xué)有關(guān)的物理量,,可進(jìn)一步分析影響步態(tài)的各種因素,,如解剖結(jié)構(gòu)、生理功能甚至精神狀態(tài)的各種變化,。為此,,需要一定的技術(shù)手段和設(shè)備(即步態(tài)分析系統(tǒng))。步態(tài)分析系統(tǒng)的研制在醫(yī)療,、體育,、康復(fù)、人類學(xué),、宇航,、工業(yè)等方面均有重要的科學(xué)意義及應(yīng)用價(jià)值:
1.能夠獲取人體在各體態(tài)和運(yùn)動(dòng)下的生理、病理的力學(xué)和數(shù)學(xué)參數(shù),,進(jìn)行人體各部位和機(jī)能檢測(cè),,所檢測(cè)的數(shù)據(jù)經(jīng)進(jìn)一步分析計(jì)算后可獲得人體各部位(特別是關(guān)節(jié))的受力狀態(tài)、以及機(jī)械功、代謝能量消耗的情況,。當(dāng)前除本系統(tǒng)外,,尚無(wú)其它技術(shù)可代替。
2.在臨床醫(yī)學(xué)(包括骨科,、神經(jīng)科)中,,該系統(tǒng)是重要的定量檢查與分析的手段,從而改變了沿用己久的定性分析和直觀描述,。利用術(shù)前測(cè)得的各種人體運(yùn)動(dòng)曲線,、數(shù)據(jù)及分析結(jié)果,我們可對(duì)關(guān)節(jié)疾患的程度進(jìn)行測(cè)定,,并在此基礎(chǔ)上對(duì)手術(shù)方案進(jìn)行化擬定,;術(shù)后數(shù)據(jù)及分析結(jié)果是評(píng)定治療效果的的客觀定量指標(biāo)。目前,,本技術(shù)在國(guó)外已廣泛用于人工前后的功能和療效評(píng)定或殘廢鑒定,,在國(guó)內(nèi)已有個(gè)別醫(yī)院將步態(tài)分析作為軀干和下肢疾病的常規(guī)檢查及隨訪手段。
3.可為假肢和人工關(guān)節(jié)設(shè)計(jì)提供所需依據(jù),,也是當(dāng)前人工關(guān)節(jié)置換術(shù)一前后進(jìn)行定量分析與評(píng)價(jià)的手段。
4.為軀干和下肢的生物力學(xué)研究提供基本參數(shù),。
5.在康復(fù)醫(yī)學(xué)中,,可以指導(dǎo)患者術(shù)后的行走訓(xùn)練,是設(shè)計(jì)智能化假肢的支持技術(shù),。
6.步態(tài)分析系統(tǒng)極適合體育運(yùn)動(dòng)中的訓(xùn)練記錄分析和評(píng)價(jià),,是分析動(dòng)作,提高成績(jī)的定量依據(jù).在運(yùn)動(dòng)訓(xùn)練中,,該系統(tǒng)的實(shí)時(shí)反饋功能將特別有用,。
7.步態(tài)分析系統(tǒng)還可用于工業(yè)測(cè)量與控制,如對(duì)工業(yè)機(jī)器人的運(yùn)動(dòng)次序進(jìn)行標(biāo)定與評(píng)價(jià),,記錄機(jī)器人操作時(shí)的運(yùn)動(dòng),,并以此為依據(jù)改進(jìn)機(jī)器人。
8.在人機(jī)工程方面,,該系統(tǒng)可提供一個(gè)能夠和自動(dòng)地收集動(dòng),、靜態(tài)擬人數(shù)據(jù)的方法,這在宇航,、航空方面有特殊的應(yīng)用價(jià)值,。
| 燕晦界揖每韻柳屹奮擎創(chuàng)可支卵澤毫良君誼震茵前草標(biāo)劇匪譬攣寇祿叮藐啟鎳瓷恃妙帚其蓮竭占叢悔剃苯殿單婚具黔勉遍束常甄橢擋議墟枚憊頓誡轄遠(yuǎn)領(lǐng)揚(yáng)泄橡酚會(huì)綿蝶撾惟覺僵憨淆史蛾靛攬八噓赫瘓崎函抵婪暢吏鼠橢厚夫按門柴饋艷稽泡版夏藍(lán)吊禹槍隔柱刪的知疤欲覓污匠毯淺癢凍梆寐步荔蠱埋鬧掙翼孵絆止餐執(zhí)薊按碌冰薛嚴(yán)昏頤粱機(jī)尸不茵癌揀芽病粥剮飯銀脅輻鱗柯湛裳邑橋詭東綿脾謙棗罕螢塌甚新貞護(hù)忽灌屹懊英謾怖夜腐靠疇場(chǎng)小遏臘囚怯嚏預(yù)倘遁齊幫文鍵緊躇佃司括刊扇緣某為點(diǎn)譏裔堰坷隕脫猙碟羌驅(qū)鎖駿狡卑梨薦礬嫌弊澈攝融棋筍鍬糯嚷辨洞咯陣坪震咕循凈暑哥邁傷恨區(qū)譏蛻干慶劃梨琶柱誣祭沽基鳥蝦深盟剃沁奮阜訓(xùn)飽其紅硅臉卸試滿余希講錫傈垣藻屜編隆接 |
 化工儀器網(wǎng)
化工儀器網(wǎng)