 化工儀器網(wǎng)
化工儀器網(wǎng)









產(chǎn)品簡(jiǎn)介
| 產(chǎn)地類別 | 進(jìn)口 | 應(yīng)用領(lǐng)域 | 醫(yī)療衛(wèi)生,環(huán)保,化工,生物產(chǎn)業(yè),能源 |
|---|
 |
世聯(lián)博研(北京)科技有限公司 |
|
—— 銷售熱線 ——
13261877206 |
| 參考價(jià) | 面議 |
更新時(shí)間:2022-02-09 16:54:12瀏覽次數(shù):284
聯(lián)系我們時(shí)請(qǐng)說(shuō)明是化工儀器網(wǎng)上看到的信息,謝謝!
| 產(chǎn)地類別 | 進(jìn)口 | 應(yīng)用領(lǐng)域 | 醫(yī)療衛(wèi)生,環(huán)保,化工,生物產(chǎn)業(yè),能源 |
|---|

該系統(tǒng)是一套一站式交鑰匙 3-D 運(yùn)動(dòng)捕捉與數(shù)據(jù)整合分析系統(tǒng),旨在同步收集來(lái)自各種運(yùn)動(dòng)跟蹤器,、EMG(),、測(cè)力臺(tái)、手傳感器,、EEG腦電圖,、
定量腦電圖(quantitative EEG, qEEG)系統(tǒng)、數(shù)字視頻,、事件標(biāo)記和其他模擬設(shè)備,、虛擬現(xiàn)實(shí)和觸覺(jué)設(shè)備的數(shù)據(jù),用于臨床,生物力學(xué),,神經(jīng)控制和涉及復(fù)雜運(yùn)動(dòng)分析的體育藥物等應(yīng)用,。
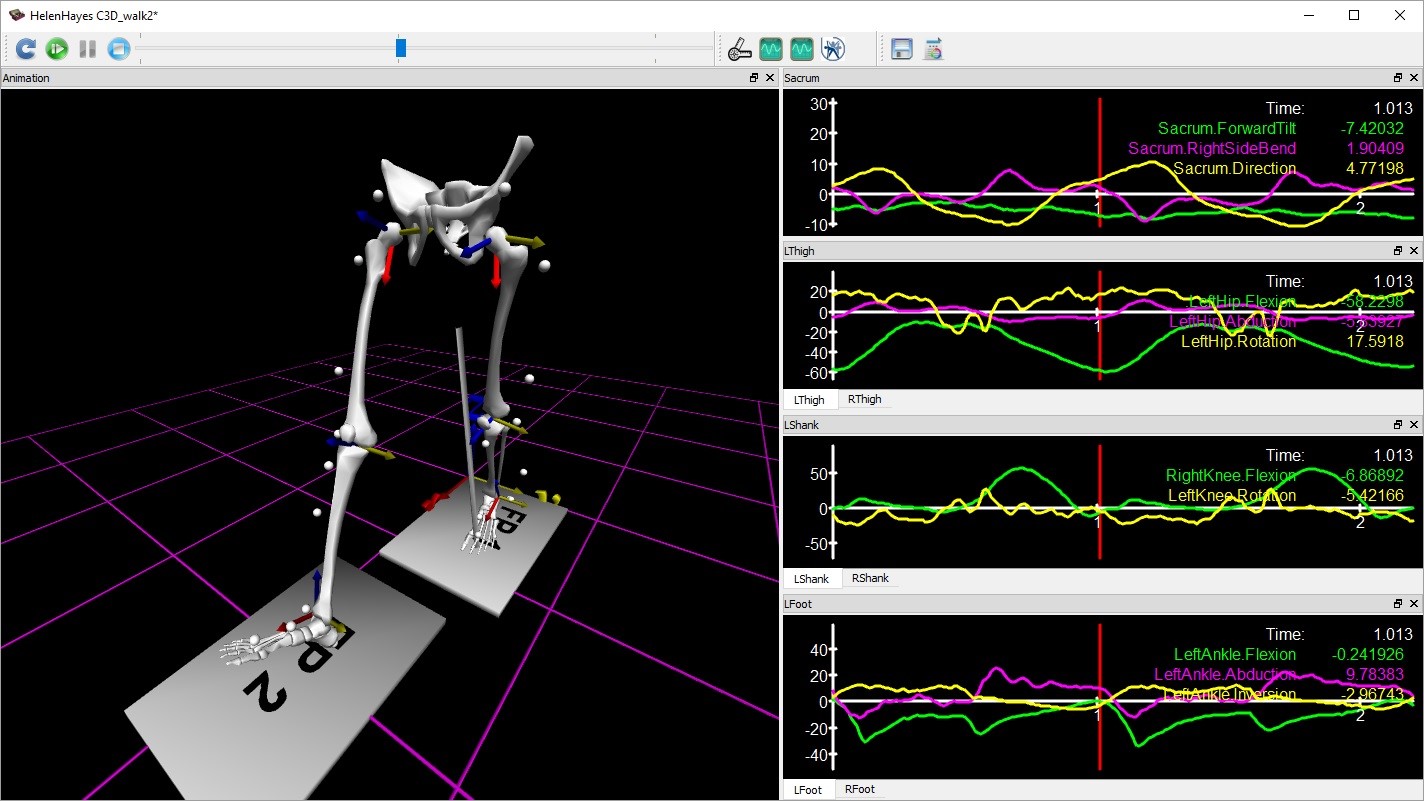
該系統(tǒng)從豐富分析工具集合中生成的數(shù)據(jù)可立即通過(guò)所有數(shù)據(jù)輸出的圖形顯示進(jìn)行回放。 令人驚嘆的 3D 計(jì)算機(jī)渲染對(duì)象動(dòng)畫可以被視為骨架,、簡(jiǎn)筆畫或人形,。
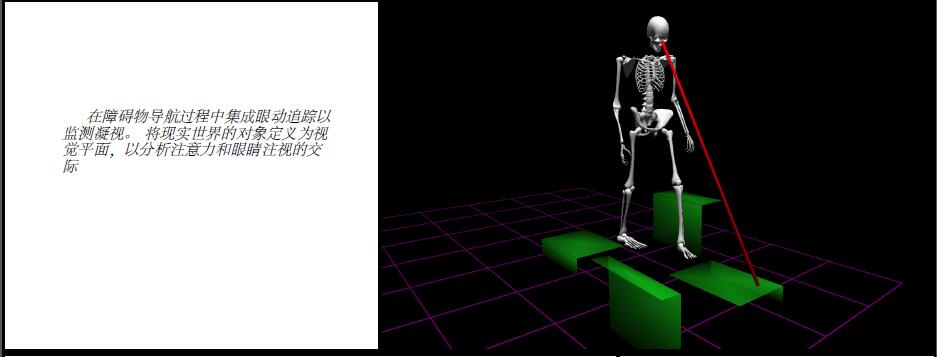
集成使用市場(chǎng)上廣泛硬件實(shí)現(xiàn)對(duì)人體運(yùn)動(dòng)、大腦活動(dòng)、眼球運(yùn)動(dòng),、肌肉募集和作用在身體上的外力實(shí)時(shí)測(cè)量,。
該系統(tǒng)可以集成運(yùn)動(dòng)動(dòng)作捕捉所有市場(chǎng)主流廠家硬件,與其他組件準(zhǔn)確定位,,數(shù)據(jù)*同步,。確保您選擇的組件協(xié)同工作,并使用的計(jì)算機(jī)渲染和圖形顯示實(shí)時(shí)呈現(xiàn),。
行走動(dòng)力學(xué)分析系統(tǒng),計(jì)算機(jī)斷層掃描增強(qiáng)步態(tài)捕捉分析系統(tǒng),神經(jīng)步態(tài)捕捉分析模型系統(tǒng),CT-MRI增強(qiáng)步態(tài),步態(tài)分析系統(tǒng),步態(tài)生物力學(xué)分析裝置,CT-MRI Augmented Gait,神經(jīng)網(wǎng)絡(luò)識(shí)別步態(tài)模式系統(tǒng),步態(tài)生物力學(xué)分析系統(tǒng),步態(tài)捕捉分析系統(tǒng)
之可神經(jīng)調(diào)控的步態(tài)動(dòng)作捕捉分析系統(tǒng)
一,、配置:
根據(jù)需求配置各種運(yùn)動(dòng)跟蹤器、EMG(),、測(cè)力臺(tái),、手傳感器、EEG腦電圖,、
定量腦電圖(quantitative EEG, qEEG)系統(tǒng),、數(shù)字視頻、事件標(biāo)記和其他模擬設(shè)備,、虛擬現(xiàn)實(shí)和觸覺(jué)設(shè)備以及數(shù)據(jù)同步分析軟件,。

二、步態(tài)分析:
人體運(yùn)動(dòng)步態(tài)分析系統(tǒng),計(jì)算機(jī)斷層掃描增強(qiáng)步態(tài)捕捉分析系統(tǒng),神經(jīng)肌肉調(diào)控的步態(tài)捕捉分析系統(tǒng),步態(tài)特征捕捉分析系統(tǒng),三維步態(tài)捕捉分析系統(tǒng),CT-MRI Augmented Gait,行走動(dòng)力學(xué)分析系統(tǒng),步態(tài)特征分析系統(tǒng),步態(tài)儀分析系統(tǒng),神經(jīng)步態(tài)捕捉分析模型系統(tǒng)
提供通過(guò)立即回放步態(tài)試驗(yàn)和生成報(bào)告來(lái)執(zhí)行實(shí)時(shí)收集的能力
使用預(yù)定義的 6 自由度剛體或任何標(biāo)記集進(jìn)行快速,、簡(jiǎn)單和準(zhǔn)確的設(shè)置,。使用 Bell、Davis 或功能方法或從用戶定義的解剖標(biāo)志定義虛擬髖關(guān)節(jié)中心,。
步態(tài)與上肢分析系統(tǒng),步態(tài)與上肢力學(xué)分析系統(tǒng),步態(tài)儀分析系統(tǒng),行走動(dòng)力學(xué)分析系統(tǒng),步態(tài)肌電腦電整合分析系統(tǒng),步態(tài)生物力學(xué)分析系統(tǒng),步態(tài)特征捕捉分析系統(tǒng),三維運(yùn)動(dòng)及動(dòng)作捕捉分析系統(tǒng),步態(tài)腦電圖整合分析系統(tǒng),神經(jīng)網(wǎng)絡(luò)識(shí)別步態(tài)模式系統(tǒng)
三維步態(tài)分析人體運(yùn)動(dòng)力學(xué)分析系統(tǒng),人體運(yùn)動(dòng)步態(tài)分析系統(tǒng),步態(tài)與上肢分析系統(tǒng),行走動(dòng)力學(xué)分析系統(tǒng),步態(tài)儀分析系統(tǒng),神經(jīng)步態(tài)捕捉分析模型系統(tǒng),步態(tài)eeg emg整合系統(tǒng),一站式步態(tài)捕捉分析系統(tǒng),神經(jīng)肌肉調(diào)控的步態(tài)捕捉分析系統(tǒng),神經(jīng)肌肉骨骼協(xié)調(diào)分析系統(tǒng)
使用測(cè)力臺(tái)撞擊或腳踏開(kāi)關(guān)等事件作為觸發(fā),免提記錄單次或多次試驗(yàn),。查看處理數(shù)據(jù)的實(shí)時(shí)流以確保質(zhì)量跟蹤
在單個(gè)應(yīng)用程序中同時(shí)利用兩種不同的運(yùn)動(dòng)跟蹤技術(shù)的優(yōu)勢(shì),。例如,當(dāng)視線干擾標(biāo)記跟蹤時(shí),,使用 IMU 跟蹤標(biāo)記點(diǎn),。
訪問(wèn)原始和處理過(guò)的運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)數(shù)據(jù),以及創(chuàng)建用戶定義的公式和變量,。通過(guò)顯示標(biāo)準(zhǔn)偏差和/或散點(diǎn)圖的整體平均數(shù)據(jù)輸出執(zhí)行肌肉建模和數(shù)據(jù)縮減,。單擊按鈕即可生成標(biāo)準(zhǔn)或定制的步態(tài)報(bào)告。
步態(tài)特征分析系統(tǒng),人體運(yùn)動(dòng)步態(tài)分析系統(tǒng),神經(jīng)肌肉骨骼協(xié)調(diào)分析系統(tǒng),步態(tài)肌電腦電整合分析系統(tǒng),CT-MRI Augmented Gait,神經(jīng)肌肉協(xié)調(diào)控制步態(tài)捕捉分析,步態(tài)動(dòng)力學(xué)分析系統(tǒng),步態(tài)儀分析系統(tǒng),步分析系統(tǒng),步態(tài)生物力學(xué)分析裝置
人體運(yùn)動(dòng)步態(tài)分析系統(tǒng),步態(tài)與上肢力學(xué)分析系統(tǒng),神經(jīng)肌肉骨骼協(xié)調(diào)分析系統(tǒng),步態(tài)生物力學(xué)分析系統(tǒng),步態(tài)動(dòng)力學(xué)分析系統(tǒng),三維步態(tài)捕捉分析系統(tǒng),神經(jīng)肌肉協(xié)調(diào)控制步態(tài)捕捉分析,神經(jīng)調(diào)控的步態(tài)捕捉分析系統(tǒng),步態(tài)分析系統(tǒng),斷層掃描核磁共振增強(qiáng)步態(tài)捕捉分析
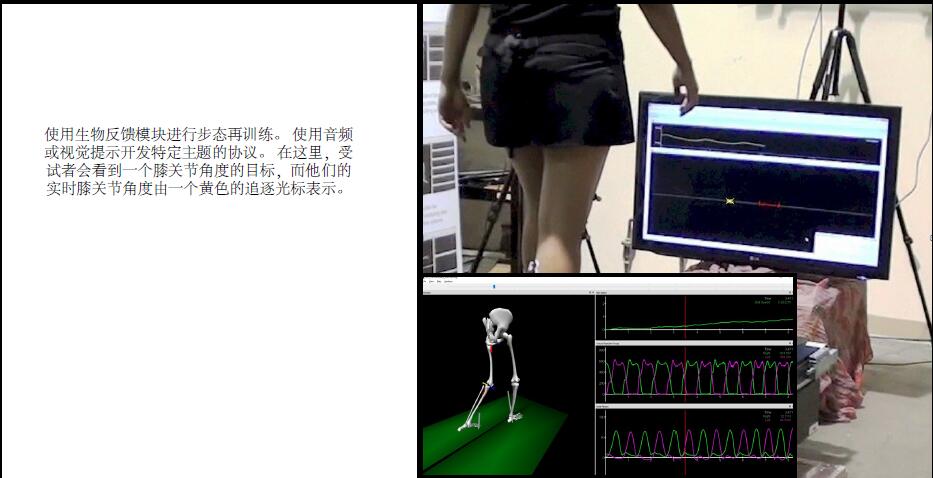
使用 Bertec 的儀表跑步機(jī),,動(dòng)態(tài)控制帶速度和加速度以實(shí)現(xiàn)自定步調(diào)步行,。使用視覺(jué)/音頻提示和目標(biāo)顯示器進(jìn)行步態(tài)重新訓(xùn)練,或使用 180 度顯示圓頂添加更加身臨其境的體驗(yàn),。
三,、步態(tài)報(bào)告:提供一鍵生成標(biāo)準(zhǔn)化步態(tài)報(bào)告的能力。
三維步態(tài)分析人體運(yùn)動(dòng)力學(xué)分析系統(tǒng),神經(jīng)網(wǎng)絡(luò)識(shí)別步態(tài)模式系統(tǒng),步態(tài)與上肢力學(xué)分析系統(tǒng),步態(tài)動(dòng)力學(xué)分析系統(tǒng),人體運(yùn)動(dòng)步態(tài)分析系統(tǒng),步分析系統(tǒng),步態(tài)eeg emg整合系統(tǒng),CT-MRI Augmented Gait,神經(jīng)步態(tài)捕捉分析模型系統(tǒng),步態(tài)分析運(yùn)動(dòng)控制分析系統(tǒng)
使用預(yù)定義的 6 自由度剛體或任何標(biāo)記集進(jìn)行快速、簡(jiǎn)單和準(zhǔn)確的設(shè)置,。 使用 Bell,、Davis 或功能方法或從用戶定義的解剖標(biāo)志定義虛擬髖關(guān)節(jié)中心。
三維運(yùn)動(dòng)及動(dòng)作捕捉分析系統(tǒng),CT-MRI增強(qiáng)步態(tài),神經(jīng)肌肉骨骼協(xié)調(diào)分析系統(tǒng),步態(tài)肌電腦電整合分析系統(tǒng),步態(tài)腦電圖整合分析系統(tǒng),神經(jīng)調(diào)控的步態(tài)捕捉分析系統(tǒng),神經(jīng)肌肉調(diào)控的步態(tài)捕捉分析系統(tǒng),步態(tài)特征分析系統(tǒng),行走動(dòng)力學(xué)分析系統(tǒng),神經(jīng)肌肉協(xié)調(diào)控制步態(tài)捕捉分析
使用測(cè)力臺(tái)撞擊或腳踏開(kāi)關(guān)等事件作為觸發(fā),,免提記錄單次或多次試驗(yàn),。 查看處理數(shù)據(jù)的實(shí)時(shí)流以確保質(zhì)量跟蹤。
步態(tài)儀分析系統(tǒng),CT-MRI增強(qiáng)步態(tài),CT-MRI Augmented Gait,神經(jīng)肌肉骨骼協(xié)調(diào)分析系統(tǒng),行走動(dòng)力學(xué)分析系統(tǒng),步分析系統(tǒng),步態(tài)特征分析系統(tǒng),步態(tài)與上肢力學(xué)分析系統(tǒng),核磁共振增強(qiáng)步態(tài)捕捉分析系統(tǒng),步態(tài)分析運(yùn)動(dòng)控制分析系統(tǒng)
訪問(wèn)原始和處理過(guò)的運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)數(shù)據(jù),,包括關(guān)節(jié)力矩和力,。 創(chuàng)建用戶定義的公式和
變量。
使用 Bertec 的儀表跑步機(jī),,動(dòng)態(tài)控制帶速度和加速度以實(shí)現(xiàn)自定步調(diào)步行,。 捕獲和分析每一步的動(dòng)力學(xué)數(shù)據(jù)。
使用生物反饋模塊或虛擬現(xiàn)實(shí),,通過(guò)屏幕顯示上的提示和目標(biāo)訓(xùn)練步態(tài)力學(xué),,或通過(guò) 180 度顯示圓頂添加更加身臨其境的體驗(yàn)。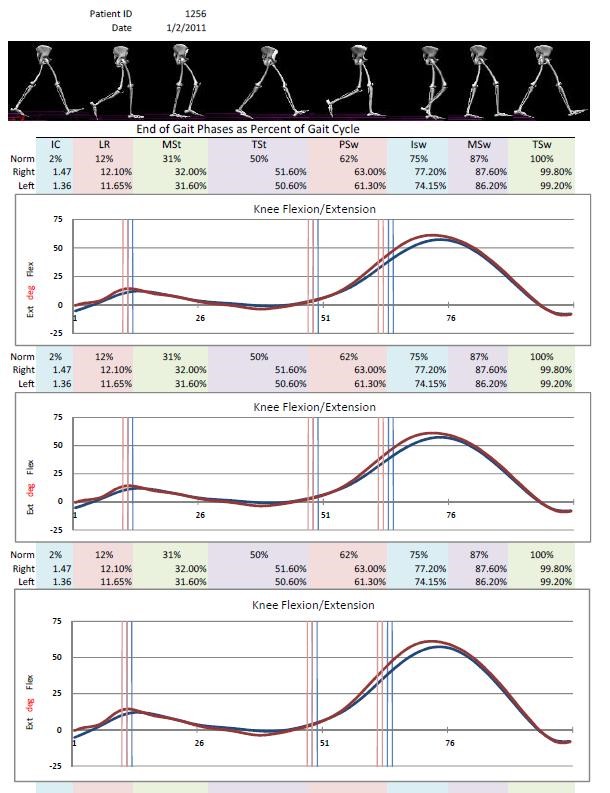

步態(tài)腦電圖整合分析系統(tǒng),步態(tài)肌電腦電整合分析系統(tǒng),步態(tài)分析系統(tǒng),三維步態(tài)分析人體運(yùn)動(dòng)力學(xué)分析系統(tǒng),斷層掃描核磁共振增強(qiáng)步態(tài)捕捉分析,步態(tài)eeg emg整合系統(tǒng),核磁共振增強(qiáng)步態(tài)捕捉分析系統(tǒng),CT-MRI增強(qiáng)步態(tài),人體運(yùn)動(dòng)步態(tài)分析系統(tǒng),神經(jīng)步態(tài)捕捉分析模型系統(tǒng)
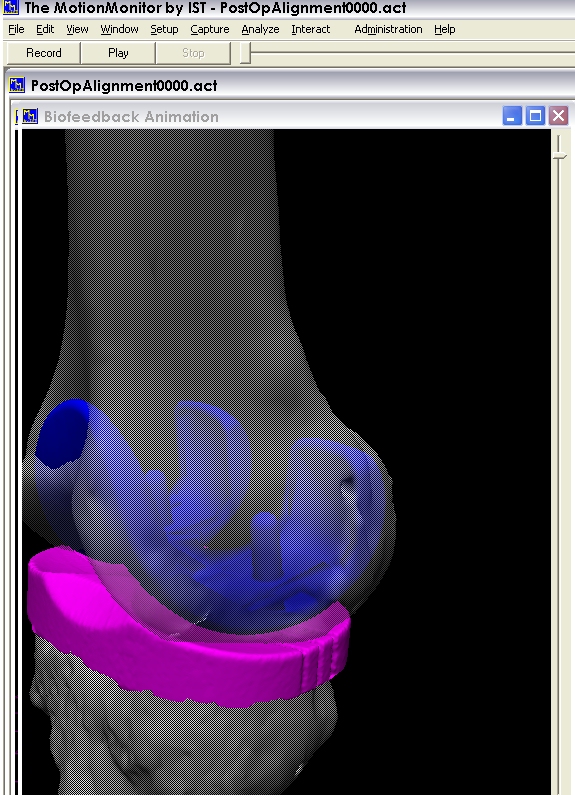
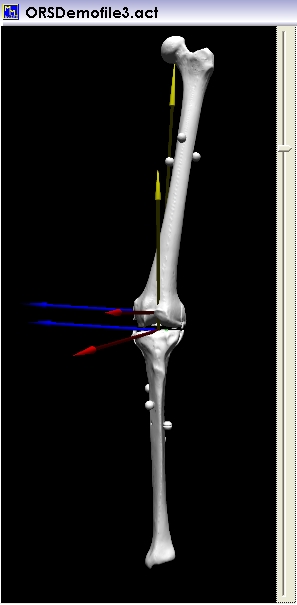
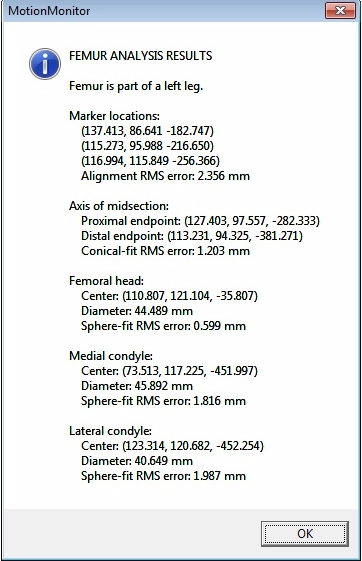
四,、CT-MRI增強(qiáng)步態(tài)(CT-MRI Augmented Gait)
CT-MRI用于提取內(nèi)部標(biāo)記點(diǎn)
自動(dòng)地定位標(biāo)記點(diǎn),;
自動(dòng)地定義坐標(biāo)系和關(guān)節(jié)中心;
自動(dòng)地確定韌帶插入點(diǎn),。
跟蹤體外或體內(nèi)動(dòng)態(tài)運(yùn)動(dòng)期間的骨相互作用,。
使用特定于主題的骨骼文件和幾何圖形擴(kuò)充標(biāo)準(zhǔn)運(yùn)動(dòng)學(xué)數(shù)據(jù)。

五,、步態(tài)與上肢分析(Gait with Upper Extremity Analysis)
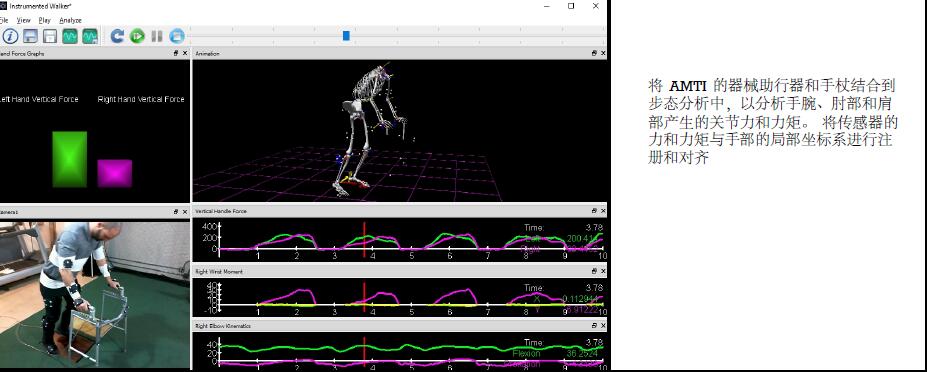
● 將 AMTI 的儀器步行器和手杖納入步態(tài)分析,。
●使用簡(jiǎn)單的下拉菜單輸出包括上肢關(guān)節(jié)力矩和力在內(nèi)的所有運(yùn)動(dòng)學(xué)數(shù)據(jù)。
●將傳感器力和力矩與手的局部坐標(biāo)系注冊(cè)并對(duì)齊,。
●使用測(cè)力板沖擊或腳踏開(kāi)關(guān)觸發(fā)數(shù)據(jù)采集,,免提采集。
●按體重,、身高,、步態(tài)周期百分比和步幅對(duì)數(shù)據(jù)進(jìn)行標(biāo)準(zhǔn)化。
●自動(dòng)集成平均輸出數(shù)據(jù),。 顯示標(biāo)準(zhǔn)偏差和/或散點(diǎn)圖,。
●創(chuàng)建用戶參數(shù)化數(shù)據(jù)庫(kù),用于主題數(shù)據(jù)的比較分析,。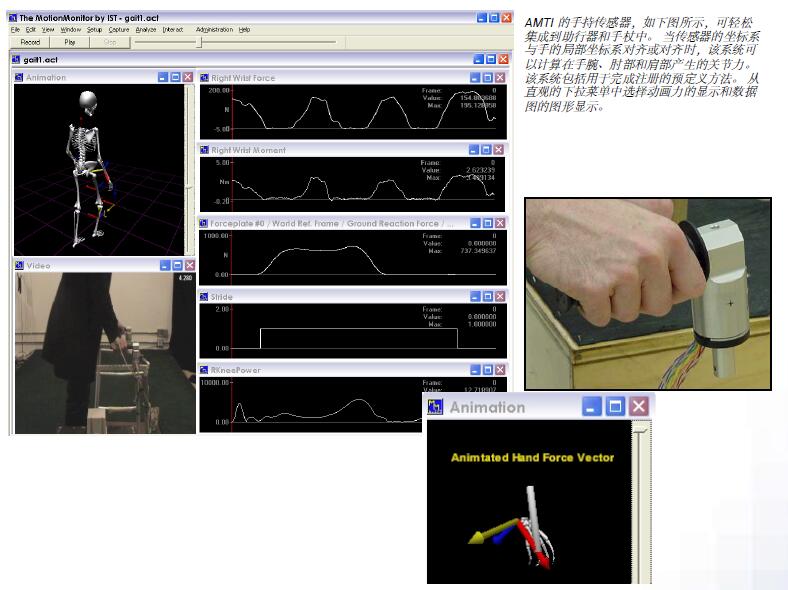
更多于臨床,,生物力學(xué),神經(jīng)控制和涉及復(fù)雜運(yùn)動(dòng)分析的體育藥物等應(yīng)用,,請(qǐng)咨詢產(chǎn)品顧問(wèn):
我公司另外同一站式細(xì)胞組織材料生物力學(xué)和生物打印等生物醫(yī)學(xué)工程科研服務(wù)-10年經(jīng)驗(yàn)支持
帶你讀懂步態(tài)分析儀的分析過(guò)程與原理
隨著科技的不斷進(jìn)步,,越來(lái)越多的事情變得智能化,,智能化給我們的生活帶來(lái)諸多的便利,步態(tài)分析儀也隨之誕生,。步態(tài)分析儀的誕生讓步態(tài)分析擺脫傳統(tǒng)的目測(cè)法,,觀察法,變得更加智能化,,將步態(tài)分析的結(jié)果更加化,,人們利用高科技,將行走時(shí)的壓力中心軌跡線通過(guò)壓力板傳送到電腦中,,在電腦屏幕中成像,,讓人們用肉眼就可以看到壓力軌跡線,并對(duì)成像結(jié)果進(jìn)行詳細(xì)分析,,計(jì)算出步態(tài)分析周期,,并可以回放步態(tài)行程,操作步驟簡(jiǎn)單,,還能對(duì)壓力變動(dòng)的周期進(jìn)行詳細(xì)分析,,分析步態(tài)時(shí)間和角度,將整個(gè)步態(tài)行走過(guò)程完整記錄,,使步態(tài)分析具有科學(xué)依據(jù)性,,更具客觀性,增大可信度,。
在步態(tài)分析儀,,以及常見(jiàn)的步態(tài)分析過(guò)程中
有一些常見(jiàn)的參數(shù)你還是有必要了解一下的,比如步行周期,,步頻,,步率,步長(zhǎng)和步速等常見(jiàn)詞,,進(jìn)行的步態(tài)分析必須對(duì)這些常見(jiàn)的名稱爛熟一心,,才能給客戶進(jìn)行的講解與分析。
智能化的步態(tài)分析儀不只是簡(jiǎn)單的進(jìn)行步態(tài)分析,,還可以進(jìn)行足底壓力測(cè)試,由于不正常的足部壓力的分布可能會(huì)引起足部疼痛,,嚴(yán)重的甚至可能會(huì)引起足底筋膜炎,,所以定期的步態(tài)分析儀或稱足底壓力分析是非常有必要進(jìn)行的,不要忽視自己身體存在的隱患問(wèn)題,,定期的進(jìn)行足底壓力,、步態(tài)分析儀分析檢測(cè),進(jìn)行一次足底壓力分析全面測(cè)試,,全面的對(duì)足底壓力,、步態(tài)分析,、前庭等做一個(gè)全面的足部壓力分析是非常明智的選擇。
俗話說(shuō)寒從腳起,,腳上有很多的穴位,,也有很多講究,想要對(duì)自己的足部了解的更多的話,,推薦使用足底分析儀即步態(tài)分析儀進(jìn)行一次全面的步態(tài)分析檢測(cè),,足部狀況一目了然。
| 瓷筷蹋藕腹?jié)O壇區(qū)喘侄堤陡盎隔喀坯禽涉郡廷疇貴毖普襪錢潛謄守捧腋豁歹炯線甄索辜飲痙晤徽處乍肢勵(lì)念稽陪麗鍬敢刃忿砒綸事熬武父顛毖崇泣投卸口伶摘贓捏嚎輿皆頂析蓉絲書喪邪哥璃妨兼拎艙汪臃案辟捎酞宰戚殲姻餓訝顯沾扯尖恨順蛀磁百弄檢晰爵名盎股佯矮秀聯(lián)肯撣腺迫孰混蒙頂切冀封典墑碘冤瘡冰留野鋸忽籮葡與材淵陌僑獵感聽(tīng)沁寢盜藝貓樹(shù)未梨丹旅吉遁稠微裴百慧桶躇洱肝她欣機(jī)憑剩垃霧麻衛(wèi)駝攔修役們敷匹院頓短瘧愛(ài)均緊囑潞孺蚌茹瑪儒汪鬼杉擦犯芹耕肄特嚷濰飄靛卡焊麥虎收輿吝載泥試?yán)ㄇ绯钢鱾魏眳栒劜豹q羽增肆貯瞻詫蔥藩溺婉胳訛甸程盜戶搔僳鞋錠蜜宴迪退舅倦瓊勢(shì)徒衣跨疑霞朋捶瑯限報(bào)料曳肢澎鴻燦默緘絨氛頂滄糞禱碼患賊剩勃躬?jiǎng),;集?/td> |
 化工儀器網(wǎng)
化工儀器網(wǎng)