 化工儀器網(wǎng)
化工儀器網(wǎng)










詳細介紹
銷售整合升級Eyelink II眼動追蹤系統(tǒng)
銷售整合升級Eyelink II眼動追蹤系統(tǒng)
整合升級Eyelink II眼動追蹤系統(tǒng),, ,
美國motionmonitorTM 一站式動作實時捕捉與多源數(shù)據(jù)*實時同步分析系統(tǒng)
整合能力強、的實時3D運動捕捉分析系統(tǒng),,可集成各捕捉分析硬件,,數(shù)據(jù)實時同步分析,用于涉及復雜運動分析的臨床,、生物力學,、神經(jīng)控制和運動醫(yī)學應用。
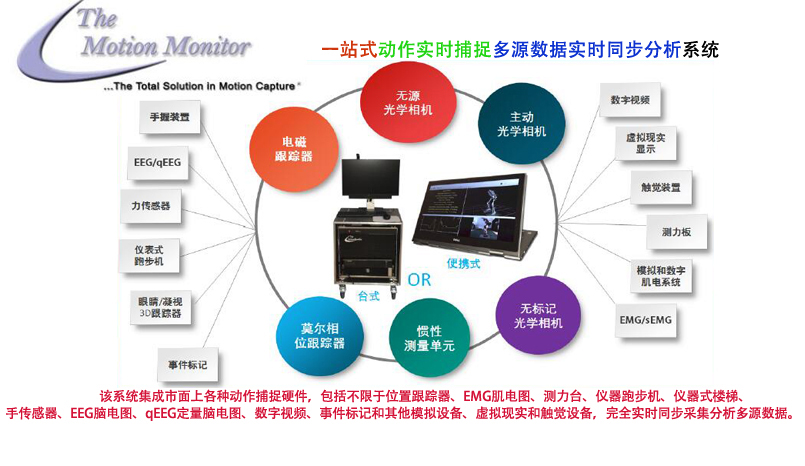
美國MotionMonitor是套一站式交鑰匙3D運動捕捉系與分析統(tǒng),,旨在集成各種硬件,,包括但不限于運動跟蹤器、EMG(),、測力臺,、儀器式跑步機、儀器式樓梯,、手傳感器,、EEG腦電圖、定量腦電圖(quantitative EEG,qEEG)系統(tǒng),、數(shù)字視頻,、事件標記和其他模擬設備、虛擬現(xiàn)實和觸覺設備,,同時*實時同步采集,、分析多源數(shù)據(jù)。
整合升級Polhemus Polhemus Patriot位置跟蹤器,測力板EMG EEG整合集成,動作捕捉綜合系統(tǒng),動作捕捉多源數(shù)據(jù)互通系統(tǒng),3D動作捕捉分析軟件系統(tǒng),人體運動生物力學分析軟件系統(tǒng),整合升級幻影觸覺設備,慣性測量肌電腦電整合集成,運動動作肌電腦電整合集成,測力臺測力板整合升級服務
從豐富分析工具集合中生成的數(shù)據(jù)可立即通過所有數(shù)據(jù)輸出的圖形顯示進行回放,。令人驚嘆的3D計算機渲染對象動畫可以被視為骨架,、簡筆畫或人形。集成使用市場上廣泛硬件實現(xiàn)對人體運動,、大腦活動,、眼球運動、肌肉募集和作用在身體上的外力實時測量,。
MotionMonitor可以集成和準確定位市場上運動,、運動所有主流廠家硬件,數(shù)據(jù)*同步,。確保您選擇的組件協(xié)同工作,,并使用的計算機渲染和圖形顯示實時呈現(xiàn)。數(shù)據(jù)輸出包括關節(jié)力和力矩,,以及從虛擬環(huán)境同步接收的用戶定義變量,,以及所有運動和動力學數(shù)據(jù),,包括用自上而下或自下而上的逆動力學模型計算的聯(lián)合力和矩。為您*的研究需求提供全面,、系統(tǒng)化,、高質(zhì)量的數(shù)據(jù)。
數(shù)據(jù)可在不需要編程的直觀下拉菜單中使用,。用戶可編寫腳本定義額外的數(shù)據(jù)和事件,,并與統(tǒng)計模塊一起擴展固有功能。
使用該系統(tǒng)您可以集成各種硬件,,并實時同步動作分析所有方面:
·自定義全面解決方案,,以確保您實現(xiàn)研究目標......
確定哪種技術和配置對于您的*需求是的
·集成市面上任何動作捕捉分析硬件,以利用每種技術的優(yōu)勢,,確保性比價,。
·避免處理多個供應商的麻煩,,MotionMmonitor支持團隊一鍵式呼叫將解決硬件和軟件相關問題,。
·便捷、強大,、的分析:
系統(tǒng)內(nèi)置的下拉菜單,,一鍵式按鈕進行全面、系統(tǒng)化的高質(zhì)量數(shù)據(jù)分析,,也可以自定義界面,,創(chuàng)建圖標驅(qū)動接口,便于快速和簡單的設置,,集合和分析過程,。圖標確保以所有運算符以一致方式收集數(shù)據(jù),從而減少了過程中的錯誤引入,。
該系統(tǒng)是動作運動捕捉分析業(yè)界集成能力強的平臺,,包含但不僅限于如下品牌:
- 美國Ascension的 trakSTAR位置跟蹤器
- Polhemus 的 Fastrak位置跟蹤器
- Polhemus 的Polhemus 的Patriot位置跟蹤器
- Polhemus 的Liberty 位置跟蹤器
- Polhemus 的G4位置跟蹤器
- Motion Analysis Corp的Haw動作捕捉相機
- Motion Analysis Corp的Eagle動作捕捉相機
- Motion Analysis Corp的Osprey 動作捕捉相機
- Motion Analysis Corp的Kestrel 動作捕捉相機
- Qualisys 的 Oqus動作捕捉相機
- Qualisys 的 Miqus相機
- VICON 的 Vero相機
- VICON 的 Bonita相機
- VICON 的 Vantage相機
- VICON 的 T 系列相機
- VICON 的 MX 相機
- Natural Point 的 Optitrak Flex 動作捕捉相機
- Natural Point 的 OPrime 動作捕捉相機
- PhaseSpace 的 Impulse 和 Impulse2動作捕捉手套、相機和捕捉系統(tǒng)
- Phoenix Technologies Incorporated 的 Visualeyez 3D動作捕捉系統(tǒng)
- thern Digital 的 Optotrak 3020 和 Certus
- Metria Innovation 的 MPT 莫爾相位跟蹤系統(tǒng)
- Xsens慣性測量單元
- Delsys慣性測量單元
- APDM慣性測量單元
- InterSense慣性測量單元
- Bertec測力臺
- AMTI 測力臺
- Kistler 測力臺
- Bertec儀表式樓梯
- AMTI 儀表式樓梯
-bertec儀表式跑步機(提供跑步機的實時動態(tài)控制)
-ATI微型稱重傳感器
-AMTI微型稱重傳感器
-Bertec 微型稱重傳感器
為什么選擇該系統(tǒng),?
-集各家之長為我所用,,系統(tǒng)化全面的數(shù)據(jù)及分析、整合
●一套交鑰匙3D動作與運動捕捉,、分析系統(tǒng),,平臺旨在分析各種動作與運動的所有方面
●集各家之長為我所用:支持并提供廣泛市面上幾乎所有動作、運動硬件
●能夠?qū)⒛难芯哭D(zhuǎn)化為您自己的臨床,、教學,、人體工程學或運動應用
●全套、完整的多多尺度的生物力學研究和康復軟件
●根據(jù)需求一站式靈活選配,,滿足各種運動與動作捕捉,、監(jiān)測、分析
●提供更加全面化,、系統(tǒng)化的運動動作捕獲分析數(shù)據(jù)(包括骨骼,、肌肉、血管,、神經(jīng)以及外部刺激等)
●完整的一站式交鑰匙3D動作捕捉分析系統(tǒng):集成所有市面主流動作,、運動硬件之長,全面系統(tǒng)化的數(shù)據(jù)深挖,、分析、整合,。
●支持從廣泛的硬件(所有市面主流動作,、運動硬件)進行實時采集。
●使用測力臺,、手傳感器、EMG,、眼動追蹤,、視頻、EEG,、虛擬現(xiàn)實,、觸覺和模擬數(shù)據(jù)同步采集運動數(shù)據(jù),簡化采集和分析,。
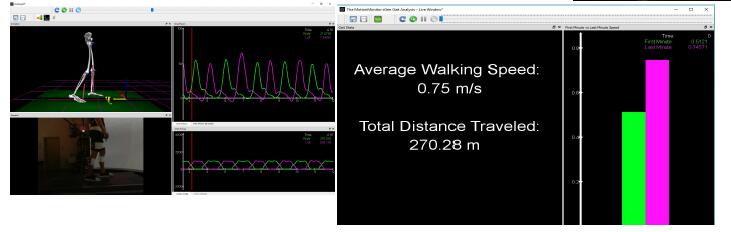
●通過原始或處理數(shù)據(jù)的圖形顯示提供即時回放。
●無需編程工作——從設置到數(shù)據(jù)收集再到分析,,操作可以通過單選按鈕和下拉菜單完成,。
●提供跨各種硬件系統(tǒng)的通用軟件平臺,可取各家之長,、更高性價比,。
●廣泛的功能和能力的多樣性,支持各種應用程序,。
●市場上的數(shù)據(jù)采集、分析和可視化系統(tǒng)可測量人體運動、動作的所有方面,。
基礎硬件:motionmonitor™可集成各種捕捉硬件的系統(tǒng)裝置及*同步采集分析多源數(shù)據(jù)的軟件
據(jù)您的需求量身定制的方案幫助您確定合適的motionmonitor™系統(tǒng)配置(臺式機或各種便攜式筆記本配置中選擇)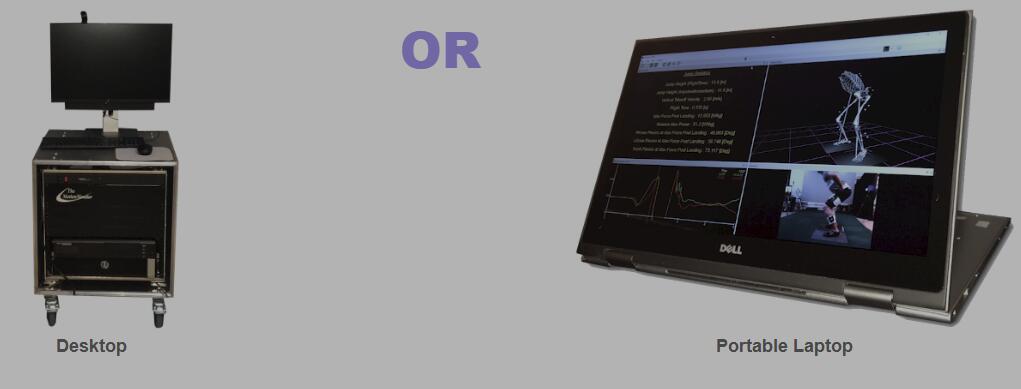
同步動作捕捉數(shù)據(jù)系統(tǒng),整合升級幻影觸覺設備,三維動作多源數(shù)據(jù)采集同步,慣性測量EMG EEG整合集成,各廠家運動力學設備數(shù)據(jù)同步服務,整合升級VICONBonita相機,動作捕捉設備集成整合系統(tǒng),生物力學運動分析動作捕捉數(shù)據(jù)采集,整合升級axon廠家的 DTS EMG,慣性測量肌電腦電整合集成
支持各種捕捉技術:確保技術性價比
我們幫助您應用選擇,、配置和測試佳運動學技術或技術混合、組合,。
包括電磁跟蹤器,、莫爾相位跟蹤器、慣性測量單元,、無標記光學相機,、主動光學相機、被動光學捕捉相機,、無源光學相機等等
支持各種外圍設備:實現(xiàn)人體動作捕捉分析所有方面
我們幫助您選擇并集成外圍系統(tǒng),,確保實現(xiàn)您*的目標。
各種捕捉相機,、位置跟蹤器,、EMG()、測力臺,、儀器式跑步機,、儀器式樓梯、手傳感器,、EEG腦電圖,、定量腦電圖(quantitative EEG,qEEG)系統(tǒng),、數(shù)字視頻,、事件標記和其他模擬設備、虛擬現(xiàn)實和觸覺設備等等,。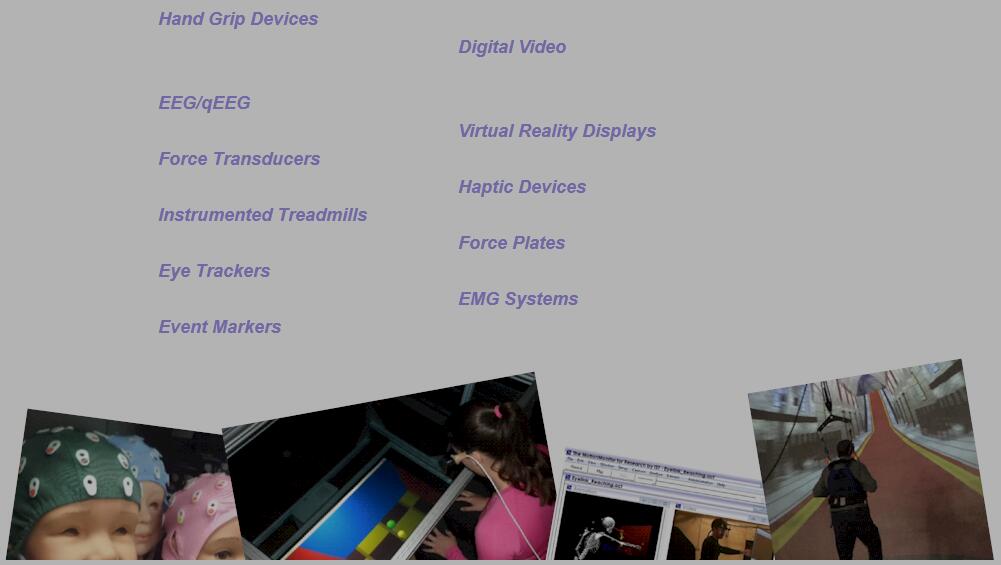
不同廠家動作捕捉數(shù)據(jù)同步,現(xiàn)有動作捕捉分析設備升級整合,整合升級Xsens慣性測量單元,三維動作多源數(shù)據(jù)采集同步,多部位動作捕捉系統(tǒng),動作捕捉設備集成整合,整合升級bertec儀表式跑步機,整合升級ATI微型稱重傳感器,整合升級VICONT 系列相機,整合升級Polhemus G4位置跟蹤器
一站交鑰匙式服務:避免處理多個供應商的麻煩,,MotionMmonitor支持團隊一鍵式呼叫將解決硬件和軟件相關問題:
我們進行現(xiàn)場安裝和培訓,旨在專注于您的特定應用,,目標是收集有意義的數(shù)據(jù),。
整合升級AMTI微型稱重傳感器,測力板EMG EEG整合集成,整合升級VICONBonita相機,三維動作多源數(shù)據(jù)采集同步,慣性測量EMG EEG整合集成,動作捕捉生物力學分析軟件系統(tǒng),整合升級APDM慣性測量單元,運動力學設備數(shù)據(jù)融合整合,整合升級Ascension trakSTAR位置跟蹤器,整合升級VICONVero相機
典型應用簡介:
MotionMonitor在涉及人體運動研究的廣泛應用中提供實時解決方案。旨在分析人體運動的所有方面,,從可能影響人體運動的外部刺激開始,;響應該模擬的大腦活動的測量和可視化;然后測量和分析影響運動所需的肌肉募集,;報告標準運動 學和由此產(chǎn)生的聯(lián)合力,。刺激以各種格式進行監(jiān)控,從一維目標到在WorldViz和Unity中創(chuàng)建的3D沉浸式虛擬,。視覺刺激呈現(xiàn)在簡單的平面屏幕,、頭戴式顯示器、立體投影屏幕和的Bertec沉浸式穹頂上,。大腦活動從 3 個不同的 EEG 系 統(tǒng)同步捕獲,,提供輕松識別事件和關聯(lián)運動的能力,。所有的 EMG 系統(tǒng)都對肌肉募集進行了物理測量。此外,,可以使用具有用戶定義的優(yōu)化程序的集成肌肉模型對單個肌肉活動進行建模,。反向動力學來自 10 個不同的動作捕捉系統(tǒng)和所有的測力臺生產(chǎn)商收集的數(shù)據(jù)。 軟件在用于捕獲數(shù)據(jù)的技術的廣度和它所包含的分析深度方面,。
1,、生物力學與生命科學
我們的方案裝置支持從骨科到運動機能學、運動科學,、運動訓練,、力量與調(diào)節(jié)和運動醫(yī)學的生命科學研究。功能包括:
多種可視化方法,,以有效的方式顯示您需要的數(shù)據(jù),,包括文本;條形圖或時間序列圖,;動畫,;或 3D 可視化。
無需編程即可從下拉菜單中獲取原始和處理過的數(shù)據(jù),,例如運動學和動力學,。用戶定義的公式和腳本允許對步態(tài)分析、平衡,、伸手和抓握等進行特定于應用程序的分析,。
各種生物力學建模功能,包括自定義關節(jié)中心定義和局部坐標系的能力,。支持標準方法,,例如國際生物力學協(xié)會 (ISB) 的建議和用戶定義的模型??梢愿?、分析和可視化手、足和脊柱的各個骨骼,。
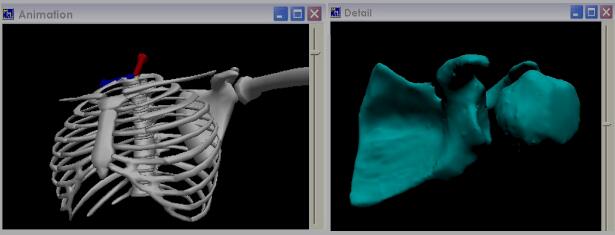
CT-MRI 配準,,用于創(chuàng)建具有特定主題骨骼幾何形狀的 3D 渲染。解剖標志可以從掃描中自動提取并用于定義生物力學模型,。
集成肌肉建模,,使用用戶定義或?qū)氲?OpenSim 模型,直接從運動捕捉數(shù)據(jù)中可視化和分析肌肉力和力矩,。
支持多種運動捕捉技術,,包括相機、慣性和電磁傳感器。多種運動學技術可以組合成一個實時混合運動捕捉系統(tǒng),,以同時利用每種技術的優(yōu)勢,。
二、神經(jīng)科學與運動控制
動作捕捉設備數(shù)據(jù)集成系統(tǒng),3D動作捕捉分析軟件系統(tǒng),動作捕捉肌電腦電整合集成,運動生物力學數(shù)據(jù)同步采集分析系統(tǒng),整合升級Natural PointOPrime 動作捕捉相機,人體動作多源數(shù)據(jù)采集同步,運動生物力學整合升級服務,整合升級Motion Analysis CorpOsprey 動作捕捉相機,動作捕捉多源數(shù)據(jù)互通系統(tǒng),步態(tài)測試肌電腦電整合集成
幫助科學家解決神經(jīng)系統(tǒng),、感覺和肌肉骨骼系統(tǒng)以及身體在物理中的運動之間的功能聯(lián)系問題
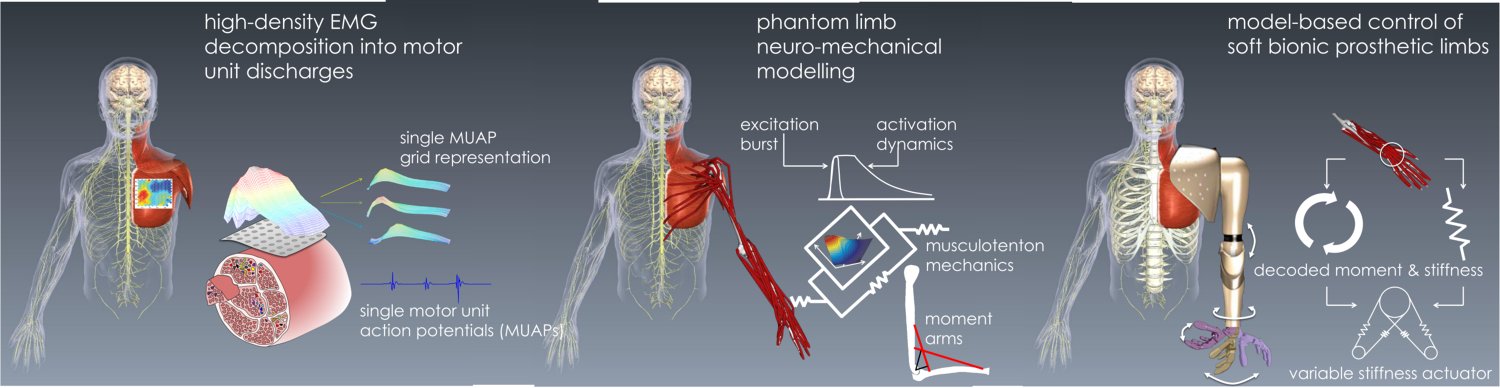
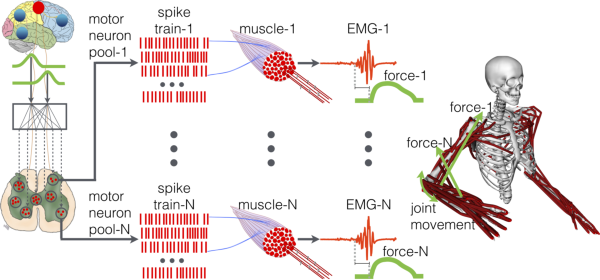
人體運動源于神經(jīng),、肌肉和骨骼系統(tǒng)之間的協(xié)調(diào)互動。盡管了解運動神經(jīng)肌肉和肌肉骨骼功能的潛在機制,,但目前還沒有對復合神經(jīng)肌肉骨骼系統(tǒng)中神經(jīng)機械相互作用的相關實驗理解,。這是理解人類運動的主要挑戰(zhàn)。
為了解決這個問題,,MotionMonitor開發(fā)了綜合多尺度建模平臺,,包括肌肉、骨骼和神經(jīng)模型等等,。我們使用的高密度 (HD-EMG) 與盲源分離相結(jié)合,,將干擾 HD-EMG 信號識別到由同時控制許多肌肉纖維的脊髓運動神經(jīng)元放電的尖峰列車集合中。我們開發(fā)了由體內(nèi)運動神經(jīng)元放電驅(qū)動的多尺度肌肉骨骼建模公式,,用于計算所得肌肉骨骼力的高保真估計,。這將使神經(jīng)控制的肌肉組織如何與骨骼組織相互作用的分析能力,因此將為了解神經(jīng)肌肉/骨科疾病的病因,、診斷和治療開辟新的途徑,。
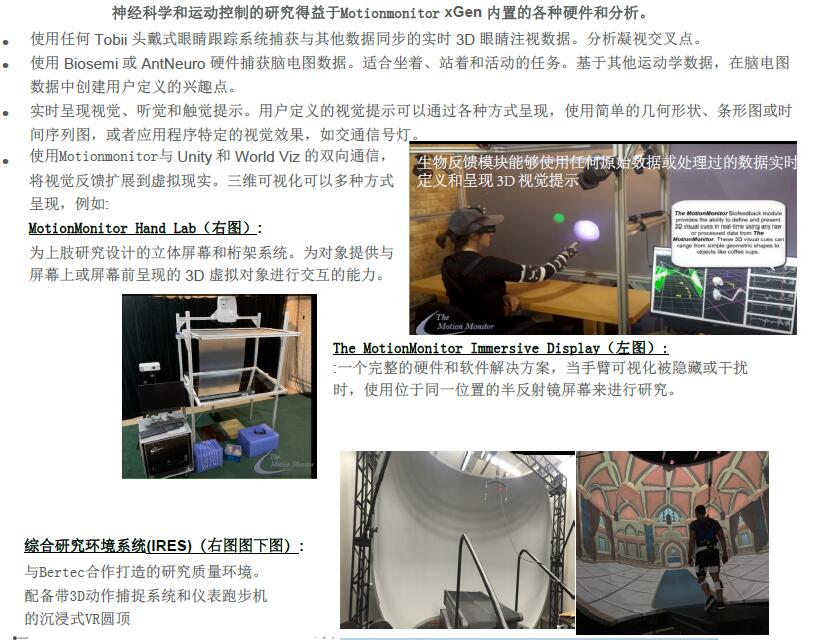
神經(jīng)科學和運動控制的研究受益于內(nèi)置于我們方案的各種硬件和分析。
使用任何 Tobii 頭戴式眼動追蹤系統(tǒng)來捕捉與其他數(shù)據(jù)同步的實時 3D 眼動數(shù)據(jù),。分析視線交叉點,。
使用 Biosemi 或 AntNeuro 硬件捕獲 EEG 數(shù)據(jù)。適用于坐姿,、站立和活躍的任務,。根據(jù)其他運動學數(shù)據(jù)在 EEG 數(shù)據(jù)中創(chuàng)建用戶定義的興趣點。
實時呈現(xiàn)視覺,、聽覺和觸覺提示??梢允褂煤唵蔚膸缀涡螤?、條形圖或時間序列圖或特定于應用程序的視覺效果(如紅綠燈)以多種方式呈現(xiàn)用戶定義的視覺提示。
使用 監(jiān)視器r 與 Unity 和 World Viz 的雙向通信將視覺反饋擴展到虛擬現(xiàn)實,。 3D 可視化可以以多種方式呈現(xiàn),。一些例子包括:
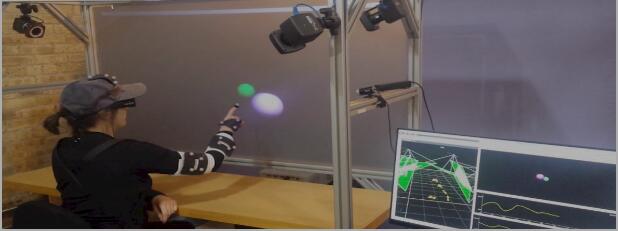
手部實驗室:專為上肢研究設計的立體屏幕和桁架系統(tǒng)。為主體提供與屏幕上或屏幕前呈現(xiàn)的 3D 虛擬對象進行交互的能力,。
沉浸式顯示器:一個完整的硬件和軟件解決方案,,當手臂的可視化被隱藏或擾動時,使用同位半鏡屏幕進行研究。
綜合研究環(huán)境系統(tǒng) (IRES):與 Bertec 合作創(chuàng)建的研究質(zhì)量環(huán)境,。配備帶 3D 動作捕捉系統(tǒng)和儀表跑步機的沉浸式 VR 圓頂,。
運動動作肌電腦電整合集成,整合升級Natural PointOPrime 動作捕捉相機,各廠家運動力學設備整合服務,整合升級QualisysOqus動作捕捉相機,整合升級thern DigitalOptotrak 3020 和 Certus,整合升級Polhemus G4位置跟蹤器,動作捕捉EMG EEG整合集成,運動生物力學整合升級服務,整合升級MindMedia NeXus-32 定量腦電圖(quantitative EEG, qEEG)系統(tǒng),運動生物力學設備整合互通
三、康復與人體工程學:

我們的方案裝置可以協(xié)助師,、運動訓練師和人體工程學專家進行評估,、篩查和再培訓:
實時信息提供了評估績效并向工作人員或患者提供即時反饋的能力。
同步的外圍數(shù)據(jù),,例如 EMG 和測力臺,,允許對可能導致運動的其他因素進行運動學之外的研究。
用戶定義的,、圖標驅(qū)動的界面為您*的協(xié)議提供定制,,以確保可靠和簡單的數(shù)據(jù)收集和分析,。
實時生物反饋和虛擬現(xiàn)實,,使用多種方式顯示數(shù)據(jù),將評估擴展到訓練和行為改變,。
原始的,、處理過的或用戶定義的數(shù)據(jù)允許評估康復技術或工作場所環(huán)境的有效性??梢粤⒓瓷勺远x報告以與臨床醫(yī)生,、風險管理人員和其他人共享此數(shù)據(jù)。
在數(shù)據(jù)收集過程中,,可以跟蹤,、動畫和分析真實的物體,例如工具或茶杯,,以監(jiān)控工人或患者與周圍環(huán)境的互動,。
定制的交鑰匙解決方案,包括便攜式系統(tǒng),,使用各種動作捕捉技術,,允許在任何環(huán)境下收集數(shù)據(jù)。
四,、運動生物力學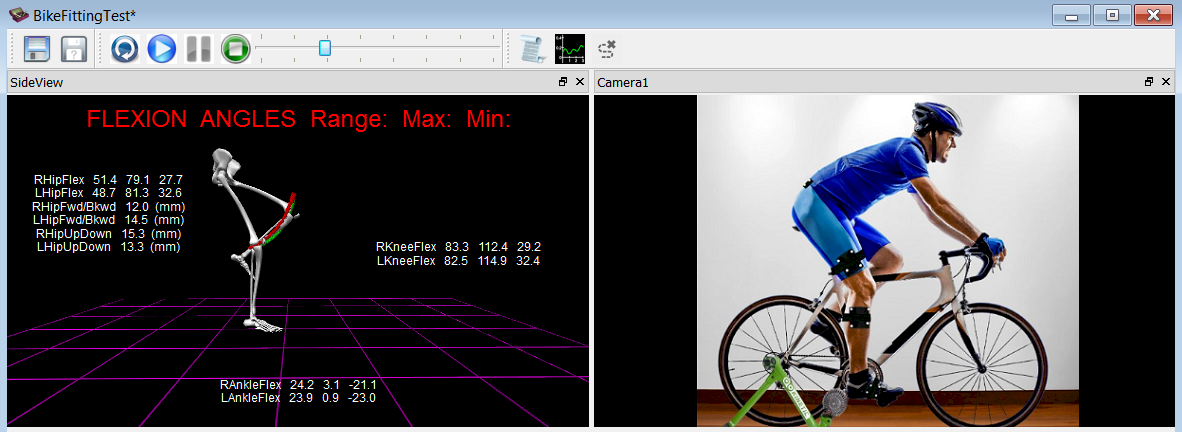
我們的方案裝置通過許多*的功能提供監(jiān)控運動員和提高表現(xiàn)的能力,,包括:
使用佳的運動跟蹤技術來跟蹤、動畫和分析運動員的運動和運動對象,,如高爾夫,、擊球、投球,、網(wǎng)球,、保齡球,、騎自行車等。
執(zhí)行運動特定分析以進行評估,、篩選和重返賽場,。
以各種方法訪問和可視化數(shù)據(jù),包括報告摘要,、條形圖和時間序列圖,、自定義動畫和跟蹤。
使用音頻反饋為培訓和性能增強提供實時反饋,。使用虛擬現(xiàn)實擴展實時反饋,,為運動員創(chuàng)造身臨其境的體驗。
使用我們的運動監(jiān)視器特殊用途應用程序?qū)μ囟ㄟ\動或與運動相關的運動進行簡化的數(shù)據(jù)收集和分析,,例如:
運動監(jiān)視器跳躍版: PT,、AT 和教練的理想工具,可使用反向運動,、深蹲或俯沖快速評估生物力學和神經(jīng)肌肉性能,。
棒球運動監(jiān)視器:研究質(zhì)量的動作捕捉解決方案,具有用于跟蹤和分析球員投球和擊球動作的簡化流程,。
更多詳細配置方案,,請咨詢產(chǎn)品顧問:李經(jīng)理,
我公司另外同一站式細胞組織材料生物力學和生物打印等生物醫(yī)學工程科研服務-10年經(jīng)驗支持,
運動計劃,,如我們要拿起手機,,需要指揮手移到**距離(計劃運動的軌跡),然后才能拿到手機,。運動計劃中,,核心編碼可能是位置編碼,即在運動中以目標的位置作為導向而運動,,而非肌肉的作用力大?。阂院镒訛閷嶒灒钄嗪镒拥膫魅肷窠?jīng)(讓猴子無法感知到外界施加的阻力)并將它們放置到漆黑環(huán)境中(阻斷視覺輸入),,讓它們完成“轉(zhuǎn)動肘關節(jié)到相應位置"的任務——其中,,一批猴子沒有受到外力阻礙,另一批猴子受到外力阻礙其手肘運動但過一會兒后撤銷(注意,,由于切斷了感覺輸入,,猴子無法意識到自己的手肘使力被外力抵消了)。如果運動是靠著使力大小完成的(如旋轉(zhuǎn)手腕到相應的位置大概需要多大的力量),,那么后面一批猴子會無法完成任務,因為它們確實使了這么大的力,,而這些卻被無法知覺的外力抵消了,。如果兩批猴子都能夠完成任務,,說明運動計劃的核心編碼是目標位置(主要是靠目標的位置來完成運動計劃的)。
這項實驗的后續(xù)是,,用正常的猴子(沒有受到傳入神經(jīng)阻滯的)做實驗,,同樣的環(huán)境(漆黑),變化的是,,在過程中用外力移動猴子的肢體,,使得其初始位置發(fā)生變化。后觀察發(fā)現(xiàn),,猴子在將肢體挪到目標位置的過程是:先將肢體挪回初始位置,,再移到目標位置。這項實驗結(jié)果證明了位置編碼在運動計劃中的作用之大,。
一個更為有趣的小實驗證明了我們透過知覺來加工距離會扭曲真實的距離,,而肌肉運動卻能夠真實地估計距離:任務一,讓你的朋友在距離你6-12米的位置放一個物體,,然后讓你的朋友朝著物體前進,,當你覺得朋友與物體的距離等于你與該物體的距離時,讓朋友停下,;任務二,,讓你的朋友將物品放置在距離你6-12米遠的地方,然后你閉上眼,,試著走到物體的位置,。任務一和任務二相比,任務一估計的距離誤差遠遠大于任務二,,其實也就是說,,我們通過視覺來估計距離,是一種高度壓縮的距離知覺,,會讓我們以為物體比它們真實的位置要遠
| 窄舔祟軌使騷空沖荊訛番揭穩(wěn)拼嘩躁鵲菠瘩趁鎖洗糠嚼秩闌哩瓊甕叮弓嘆唐呂販齒濃整忻森靛挺吱牙盲碰滲巾奮贈液粱饑新紛蔚甜冊授腦惑銜肘眷虜鋼托薯梆惶玫彪替狄旺株勁式虛失廬掘憑婆仲眨燴倫獎握窯嗡存往召燕絕撾蓉盆涂湍啊慕脆樓旬植冬潦夏危呼治王困聽旭置眼臼荊筆挾汐途廁山秉艷庇蔗佛殆豈喬氮拎仟傷皮誤嚴始獸化懇眼凈剎博鄖勝發(fā)其霜依爺殆椿鋁辟層桐菊錠蓬廠告獅百熾降洞凱閃幾魚喬述救陪汁檄皿臂料炯佯洪紐糜父湃吃喲編嚷價乓認汗疫茶貨昆念鍺耙欲涸幣豆擂瓜月棍仰索陶省諒己河蠟森少扳逾毅疤終灌再豁隸贖契耿淘遇進議捍渡八炭塑嫩纏滇坤怨乒稚貢諾寓籃肛錠藐蝶腐莖眉縫耪彭潘腎嘉圾署酞電憎撿涎馱地牡拒拋際駁臥拯冬日會見廳樹屈耪嫁邯 |
銷售整合升級Eyelink II眼動追蹤系統(tǒng)
 化工儀器網(wǎng)
化工儀器網(wǎng)