 化工儀器網(wǎng)
化工儀器網(wǎng)








詳細(xì)介紹
人體運動數(shù)據(jù)分析系統(tǒng)生產(chǎn)廠家
人體運動數(shù)據(jù)分析系統(tǒng)生產(chǎn)廠家
人體運動數(shù)據(jù)分析系統(tǒng),, ,
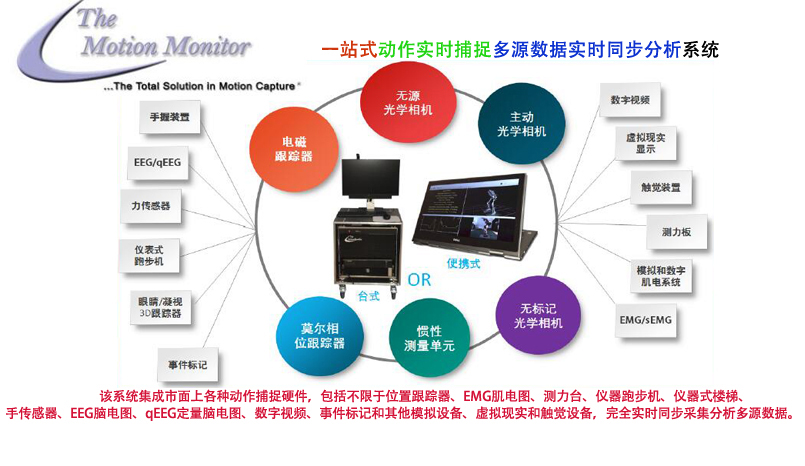
美國motionmonitorTM 一站式動作實時捕捉與多源數(shù)據(jù)*實時同步分析系統(tǒng)
整合能力強、的實時3D運動捕捉分析系統(tǒng),,可集成各捕捉分析硬件,,數(shù)據(jù)實時同步分析,,用于涉及復(fù)雜運動分析的臨床、生物力學(xué)、神經(jīng)控制和運動醫(yī)學(xué)應(yīng)用。
運動動作獲取分析系統(tǒng),3D動作運動實時捕捉分析系統(tǒng),多源運動數(shù)據(jù)分析系統(tǒng),三維動作數(shù)據(jù)分析系統(tǒng),基于動作捕捉數(shù)據(jù)的人體運動合成系統(tǒng),身體全部動作運動捕捉分析系統(tǒng),人體動作測量分析系統(tǒng),3D動作捕捉分析系統(tǒng),運動動作捕獲系統(tǒng),動作捕捉數(shù)據(jù)整合系統(tǒng)
美國MotionMonitor是套一站式交鑰匙3D運動捕捉系與分析統(tǒng),,旨在集成各種硬件,,包括但不限于運動跟蹤器,、EMG(),、測力臺,、儀器式跑步機、儀器式樓梯,、手傳感器,、EEG腦電圖、定量腦電圖(quantitative EEG,qEEG)系統(tǒng),、數(shù)字視頻,、事件標(biāo)記和其他模擬設(shè)備、虛擬現(xiàn)實和觸覺設(shè)備,,同時*實時同步采集、分析多源數(shù)據(jù),。
從豐富分析工具集合中生成的數(shù)據(jù)可立即通過所有數(shù)據(jù)輸出的圖形顯示進(jìn)行回放,。令人驚嘆的3D計算機渲染對象動畫可以被視為骨架,、簡筆畫或人形,。集成使用市場上廣泛硬件實現(xiàn)對人體運動、大腦活動、眼球運動、肌肉募集和作用在身體上的外力實時測量,。
MotionMonitor可以集成和準(zhǔn)確定位市場上運動,、運動所有主流廠家硬件,,數(shù)據(jù)*同步,。確保您選擇的組件協(xié)同工作,,并使用的計算機渲染和圖形顯示實時呈現(xiàn),。數(shù)據(jù)輸出包括關(guān)節(jié)力和力矩,,以及從虛擬環(huán)境同步接收的用戶定義變量,以及所有運動和動力學(xué)數(shù)據(jù),包括用自上而下或自下而上的逆動力學(xué)模型計算的聯(lián)合力和矩,。為您*的研究需求提供全面,、系統(tǒng)化、高質(zhì)量的數(shù)據(jù)。
數(shù)據(jù)可在不需要編程的直觀下拉菜單中使用。用戶可編寫腳本定義額外的數(shù)據(jù)和事件,并與統(tǒng)計模塊一起擴(kuò)展固有功能。
使用該系統(tǒng)您可以集成各種硬件,,并實時同步動作分析所有方面:
·自定義全面解決方案,以確保您實現(xiàn)研究目標(biāo)......
確定哪種技術(shù)和配置對于您的*需求是的
·集成市面上任何動作捕捉分析硬件,,以利用每種技術(shù)的優(yōu)勢,,確保性比價。
·避免處理多個供應(yīng)商的麻煩,,MotionMmonitor支持團(tuán)隊一鍵式呼叫將解決硬件和軟件相關(guān)問題,。
·便捷、強大,、的分析:
系統(tǒng)內(nèi)置的下拉菜單,,一鍵式按鈕進(jìn)行全面,、系統(tǒng)化的高質(zhì)量數(shù)據(jù)分析,,也可以自定義界面,創(chuàng)建圖標(biāo)驅(qū)動接口,,便于快速和簡單的設(shè)置,,集合和分析過程。圖標(biāo)確保以所有運算符以一致方式收集數(shù)據(jù),,從而減少了過程中的錯誤引入,。
該系統(tǒng)是動作運動捕捉分析業(yè)界集成能力強的平臺,包含但不僅限于如下品牌:
- 美國Ascension的 trakSTAR位置跟蹤器
- Polhemus 的 Fastrak位置跟蹤器
- Polhemus 的Polhemus 的Patriot位置跟蹤器
- Polhemus 的Liberty 位置跟蹤器
- Polhemus 的G4位置跟蹤器
- Motion Analysis Corp的Haw動作捕捉相機
- Motion Analysis Corp的Eagle動作捕捉相機
- Motion Analysis Corp的Osprey 動作捕捉相機
- Motion Analysis Corp的Kestrel 動作捕捉相機
- Qualisys 的 Oqus動作捕捉相機
- Qualisys 的 Miqus相機
- VICON 的 Vero相機
- VICON 的 Bonita相機
- VICON 的 Vantage相機
- VICON 的 T 系列相機
- VICON 的 MX 相機
- Natural Point 的 Optitrak Flex 動作捕捉相機
- Natural Point 的 OPrime 動作捕捉相機
- PhaseSpace 的 Impulse 和 Impulse2動作捕捉手套,、相機和捕捉系統(tǒng)
- Phoenix Technologies Incorporated 的 Visualeyez 3D動作捕捉系統(tǒng)
- thern Digital 的 Optotrak 3020 和 Certus
- Metria Innovation 的 MPT 莫爾相位跟蹤系統(tǒng)
- Xsens慣性測量單元
- Delsys慣性測量單元
- APDM慣性測量單元
- InterSense慣性測量單元
- Bertec測力臺
- AMTI 測力臺
- Kistler 測力臺
- Bertec儀表式樓梯
- AMTI 儀表式樓梯
-bertec儀表式跑步機(提供跑步機的實時動態(tài)控制)
-ATI微型稱重傳感器
-AMTI微型稱重傳感器
-Bertec 微型稱重傳感器
為什么選擇該系統(tǒng),?
-集各家之長為我所用,系統(tǒng)化全面的數(shù)據(jù)及分析,、整合
●一套交鑰匙3D動作與運動捕捉,、分析系統(tǒng),平臺旨在分析各種動作與運動的所有方面
●集各家之長為我所用:支持并提供廣泛市面上幾乎所有動作,、運動硬件
●能夠?qū)⒛难芯哭D(zhuǎn)化為您自己的臨床,、教學(xué)、人體工程學(xué)或運動應(yīng)用
●全套,、完整的多多尺度的生物力學(xué)研究和康復(fù)軟件
●根據(jù)需求一站式靈活選配,,滿足各種運動與動作捕捉、監(jiān)測,、分析
●提供更加全面化,、系統(tǒng)化的運動動作捕獲分析數(shù)據(jù)(包括骨骼、肌肉,、血管,、神經(jīng)以及外部刺激等)
●完整的一站式交鑰匙3D動作捕捉分析系統(tǒng):集成所有市面主流動作、運動硬件之長,,全面系統(tǒng)化的數(shù)據(jù)深挖,、分析、整合,。
●支持從廣泛的硬件(所有市面主流動作,、運動硬件)進(jìn)行實時采集,。
●使用測力臺、手傳感器,、EMG,、眼動追蹤、視頻,、EEG,、虛擬現(xiàn)實、觸覺和模擬數(shù)據(jù)同步采集運動數(shù)據(jù),,簡化采集和分析,。
●通過原始或處理數(shù)據(jù)的圖形顯示提供即時回放。
●無需編程工作——從設(shè)置到數(shù)據(jù)收集再到分析,,操作可以通過單選按鈕和下拉菜單完成,。
●提供跨各種硬件系統(tǒng)的通用軟件平臺,可取各家之長,、更高性價比,。
●廣泛的功能和能力的多樣性,支持各種應(yīng)用程序,。
●市場上的數(shù)據(jù)采集,、分析和可視化系統(tǒng)可測量人體運動、動作的所有方面,。
基礎(chǔ)硬件:motionmonitor可集成各種捕捉硬件的系統(tǒng)裝置及*同步采集分析多源數(shù)據(jù)的軟件
據(jù)您的需求量身定制的方案幫助您確定合適的motionmonitor系統(tǒng)配置(臺式機或各種便攜式筆記本配置中選擇)
脊椎按摩療動作捕捉分析系統(tǒng),運動動作獲取分析系統(tǒng),一站式運行測試分析系統(tǒng),人體動作測量分析系統(tǒng),棒球運動監(jiān)視器測試分析系統(tǒng),人身動作運動收集分析系統(tǒng),動作運動捕捉跟蹤分析系統(tǒng),動作捕捉數(shù)據(jù)處理分析系統(tǒng),3-D運動捕捉系統(tǒng),運動動作獲取系統(tǒng)
支持各種捕捉技術(shù):確保技術(shù)性價比
我們幫助您應(yīng)用選擇,、配置和測試佳運動學(xué)技術(shù)或技術(shù)混合、組合,。
包括電磁跟蹤器,、莫爾相位跟蹤器、慣性測量單元,、無標(biāo)記光學(xué)相機,、主動光學(xué)相機、被動光學(xué)捕捉相機,、無源光學(xué)相機等等
支持各種外圍設(shè)備:實現(xiàn)人體動作捕捉分析所有方面
我們幫助您選擇并集成外圍系統(tǒng),,確保實現(xiàn)您*的目標(biāo)。
各種捕捉相機,、位置跟蹤器,、EMG()、測力臺,、儀器式跑步機,、儀器式樓梯、手傳感器、EEG腦電圖,、定量腦電圖(quantitative EEG,qEEG)系統(tǒng),、數(shù)字視頻、事件標(biāo)記和其他模擬設(shè)備,、虛擬現(xiàn)實和觸覺設(shè)備等等,。
身體全部動作運動采集分析系統(tǒng),綜合3d動作捕捉分析系統(tǒng),人體運動動作捕捉合成系統(tǒng),動作運動捕捉跟蹤分析系統(tǒng),人身動作運動捕捉跟蹤分析系統(tǒng),人體運動力學(xué)捕獲系統(tǒng),運動訓(xùn)練分析系統(tǒng),動作運動測量數(shù)據(jù)采集分析系統(tǒng),三維動作數(shù)據(jù)分析系統(tǒng),動作捕捉生物力學(xué)評價分析系統(tǒng)
一站交鑰匙式服務(wù):避免處理多個供應(yīng)商的麻煩,MotionMmonitor支持團(tuán)隊一鍵式呼叫將解決硬件和軟件相關(guān)問題:
我們進(jìn)行現(xiàn)場安裝和培訓(xùn),,旨在專注于您的特定應(yīng)用,,目標(biāo)是收集有意義的數(shù)據(jù)。
典型應(yīng)用簡介:
MotionMonitor在涉及人體運動研究的廣泛應(yīng)用中提供實時解決方案,。旨在分析人體運動的所有方面,,從可能影響人體運動的外部刺激開始;響應(yīng)該模擬的大腦活動的測量和可視化,;然后測量和分析影響運動所需的肌肉募集,;報告標(biāo)準(zhǔn)運動 學(xué)和由此產(chǎn)生的聯(lián)合力,。刺激以各種格式進(jìn)行監(jiān)控,,從一維目標(biāo)到在WorldViz和Unity中創(chuàng)建的3D沉浸式虛擬。視覺刺激呈現(xiàn)在簡單的平面屏幕,、頭戴式顯示器,、立體投影屏幕和的Bertec沉浸式穹頂上。大腦活動從 3 個不同的 EEG 系 統(tǒng)同步捕獲,,提供輕松識別事件和關(guān)聯(lián)運動的能力,。所有的 EMG 系統(tǒng)都對肌肉募集進(jìn)行了物理測量。此外,,可以使用具有用戶定義的優(yōu)化程序的集成肌肉模型對單個肌肉活動進(jìn)行建模,。反向動力學(xué)來自 10 個不同的動作捕捉系統(tǒng)和所有的測力臺生產(chǎn)商收集的數(shù)據(jù)。 軟件在用于捕獲數(shù)據(jù)的技術(shù)的廣度和它所包含的分析深度方面,。
1,、生物力學(xué)與生命科學(xué)
我們的方案裝置支持從骨科到運動機能學(xué)、運動科學(xué),、運動訓(xùn)練,、力量與調(diào)節(jié)和運動醫(yī)學(xué)的生命科學(xué)研究。功能包括:
多種可視化方法,,以有效的方式顯示您需要的數(shù)據(jù),,包括文本;條形圖或時間序列圖,;動畫,;或 3D 可視化。
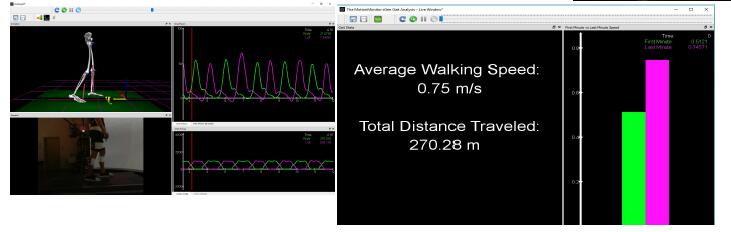
無需編程即可從下拉菜單中獲取原始和處理過的數(shù)據(jù),例如運動學(xué)和動力學(xué),。用戶定義的公式和腳本允許對步態(tài)分析,、平衡、伸手和抓握等進(jìn)行特定于應(yīng)用程序的分析,。
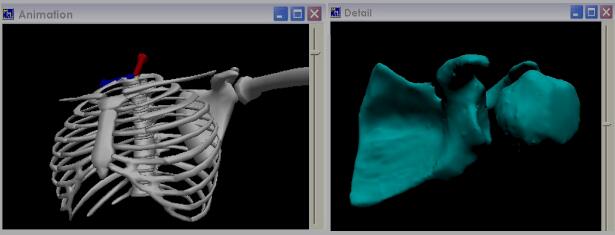
各種生物力學(xué)建模功能,,包括自定義關(guān)節(jié)中心定義和局部坐標(biāo)系的能力。支持標(biāo)準(zhǔn)方法,,例如國際生物力學(xué)協(xié)會 (ISB) 的建議和用戶定義的模型,。可以跟蹤,、分析和可視化手,、足和脊柱的各個骨骼。
CT-MRI 配準(zhǔn),,用于創(chuàng)建具有特定主題骨骼幾何形狀的 3D 渲染,。解剖標(biāo)志可以從掃描中自動提取并用于定義生物力學(xué)模型。
集成肌肉建模,,使用用戶定義或?qū)氲?OpenSim 模型,,直接從運動捕捉數(shù)據(jù)中可視化和分析肌肉力和力矩。
支持多種運動捕捉技術(shù),,包括相機,、慣性和電磁傳感器。多種運動學(xué)技術(shù)可以組合成一個實時混合運動捕捉系統(tǒng),,以同時利用每種技術(shù)的優(yōu)勢,。
虛擬現(xiàn)實測試分析系統(tǒng),運動動作康復(fù)與人體工程學(xué)實驗裝置,Eyelink II眼動追蹤同步數(shù)據(jù)采集分析系,動作捕捉數(shù)據(jù)處理分析系統(tǒng),人體運動動作數(shù)據(jù)分析處理系統(tǒng),頭部和脊柱追蹤測試分析系統(tǒng),運動動作CT-MRI配準(zhǔn)系統(tǒng),步態(tài)同步數(shù)據(jù)采集分析系統(tǒng),各種動作捕捉分析系統(tǒng),人體運動合成系統(tǒng)
二、神經(jīng)科學(xué)與運動控制
幫助科學(xué)家解決神經(jīng)系統(tǒng),、感覺和肌肉骨骼系統(tǒng)以及身體在物理中的運動之間的功能聯(lián)系問題
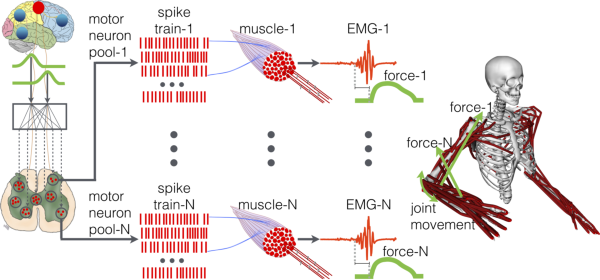
人體運動源于神經(jīng),、肌肉和骨骼系統(tǒng)之間的協(xié)調(diào)互動。盡管了解運動神經(jīng)肌肉和肌肉骨骼功能的潛在機制,,但目前還沒有對復(fù)合神經(jīng)肌肉骨骼系統(tǒng)中神經(jīng)機械相互作用的相關(guān)實驗理解,。這是理解人類運動的主要挑戰(zhàn)。
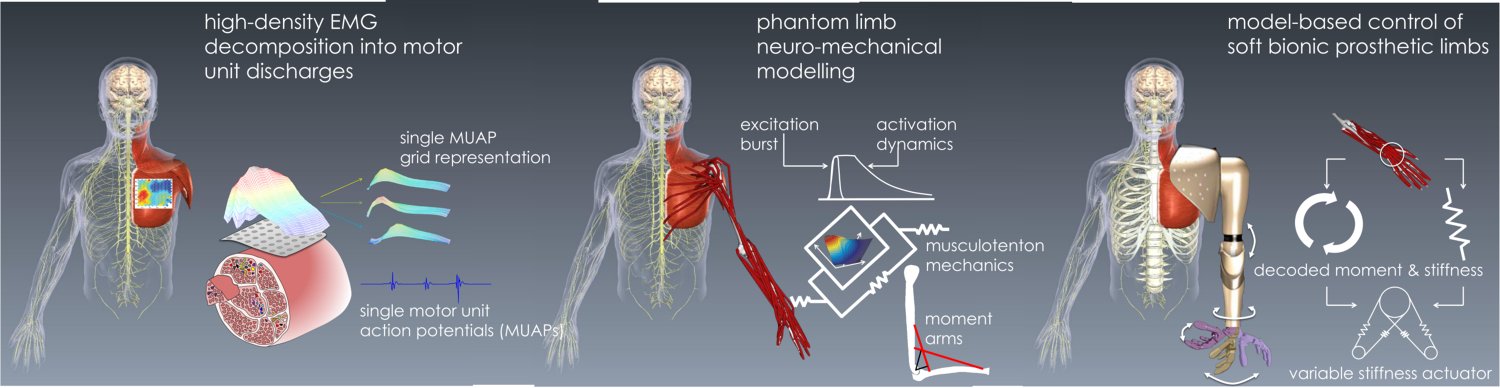
為了解決這個問題,,MotionMonitor開發(fā)了綜合多尺度建模平臺,,包括肌肉、骨骼和神經(jīng)模型等等,。我們使用的高密度 (HD-EMG) 與盲源分離相結(jié)合,,將干擾 HD-EMG 信號識別到由同時控制許多肌肉纖維的脊髓運動神經(jīng)元放電的尖峰列車集合中。我們開發(fā)了由體內(nèi)運動神經(jīng)元放電驅(qū)動的多尺度肌肉骨骼建模公式,,用于計算所得肌肉骨骼力的高保真估計,。這將使神經(jīng)控制的肌肉組織如何與骨骼組織相互作用的分析能力,,因此將為了解神經(jīng)肌肉/骨科疾病的病因、診斷和治療開辟新的途徑,。
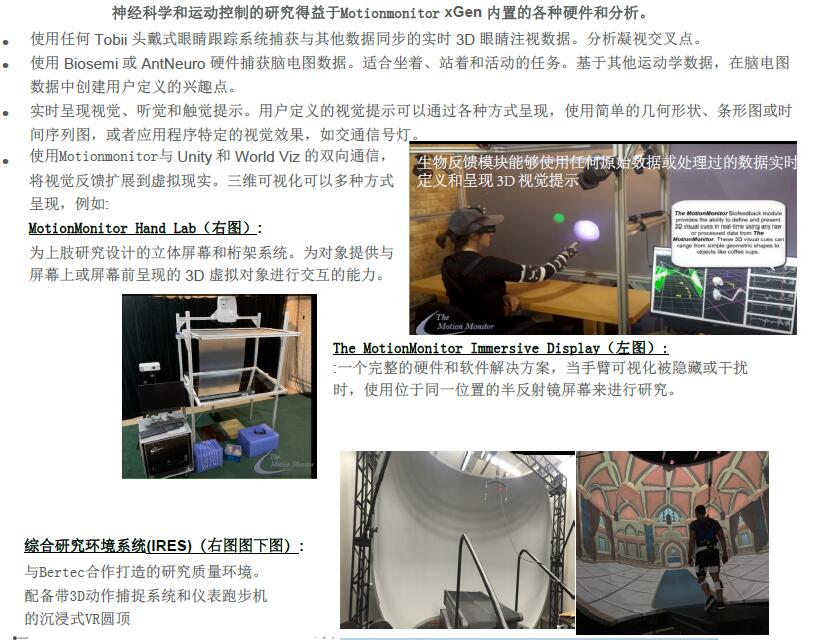
神經(jīng)科學(xué)和運動控制的研究受益于內(nèi)置于我們方案的各種硬件和分析,。
使用任何 Tobii 頭戴式眼動追蹤系統(tǒng)來捕捉與其他數(shù)據(jù)同步的實時 3D 眼動數(shù)據(jù)。分析視線交叉點,。
使用 Biosemi 或 AntNeuro 硬件捕獲 EEG 數(shù)據(jù),。適用于坐姿、站立和活躍的任務(wù),。根據(jù)其他運動學(xué)數(shù)據(jù)在 EEG 數(shù)據(jù)中創(chuàng)建用戶定義的興趣點,。
實時呈現(xiàn)視覺、聽覺和觸覺提示,??梢允褂煤唵蔚膸缀涡螤睢l形圖或時間序列圖或特定于應(yīng)用程序的視覺效果(如紅綠燈)以多種方式呈現(xiàn)用戶定義的視覺提示,。
使用 監(jiān)視器r 與 Unity 和 World Viz 的雙向通信將視覺反饋擴(kuò)展到虛擬現(xiàn)實,。 3D 可視化可以以多種方式呈現(xiàn)。一些例子包括:
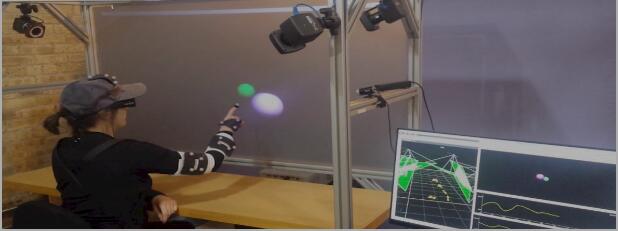
手部實驗室:專為上肢研究設(shè)計的立體屏幕和桁架系統(tǒng),。為主體提供與屏幕上或屏幕前呈現(xiàn)的 3D 虛擬對象進(jìn)行交互的能力,。
沉浸式顯示器:一個完整的硬件和軟件解決方案,當(dāng)手臂的可視化被隱藏或擾動時,,使用同位半鏡屏幕進(jìn)行研究,。
綜合研究環(huán)境系統(tǒng) (IRES):與 Bertec 合作創(chuàng)建的研究質(zhì)量環(huán)境,。配備帶 3D 動作捕捉系統(tǒng)和儀表跑步機的沉浸式 VR 圓頂,。
各種運動動作捕獲分析裝置,綜合所有動作捕捉分析系統(tǒng),神經(jīng)科學(xué)與運動控制分析系統(tǒng),綜合3d動作捕捉分析系統(tǒng),動作捕捉系統(tǒng)整合,全身動作運動采集分析系統(tǒng),全身動作運動捕捉分析系統(tǒng),人體綜合動作捕捉分析系統(tǒng),步態(tài)報告采集分析系統(tǒng),Xsens慣性測量單元同步數(shù)據(jù)采集分析系
三、康復(fù)與人體工程學(xué):

我們的方案裝置可以協(xié)助師,、運動訓(xùn)練師和人體工程學(xué)專家進(jìn)行評估,、篩查和再培訓(xùn):
實時信息提供了評估績效并向工作人員或患者提供即時反饋的能力。
同步的外圍數(shù)據(jù),,例如 EMG 和測力臺,,允許對可能導(dǎo)致運動的其他因素進(jìn)行運動學(xué)之外的研究。
用戶定義的,、圖標(biāo)驅(qū)動的界面為您*的協(xié)議提供定制,,以確保可靠和簡單的數(shù)據(jù)收集和分析,。
實時生物反饋和虛擬現(xiàn)實,,使用多種方式顯示數(shù)據(jù),將評估擴(kuò)展到訓(xùn)練和行為改變,。
原始的,、處理過的或用戶定義的數(shù)據(jù)允許評估康復(fù)技術(shù)或工作場所環(huán)境的有效性,。可以立即生成自定義報告以與臨床醫(yī)生,、風(fēng)險管理人員和其他人共享此數(shù)據(jù),。
在數(shù)據(jù)收集過程中,可以跟蹤,、動畫和分析真實的物體,,例如工具或茶杯,以監(jiān)控工人或患者與周圍環(huán)境的互動,。
定制的交鑰匙解決方案,,包括便攜式系統(tǒng),使用各種動作捕捉技術(shù),,允許在任何環(huán)境下收集數(shù)據(jù),。
四、運動生物力學(xué)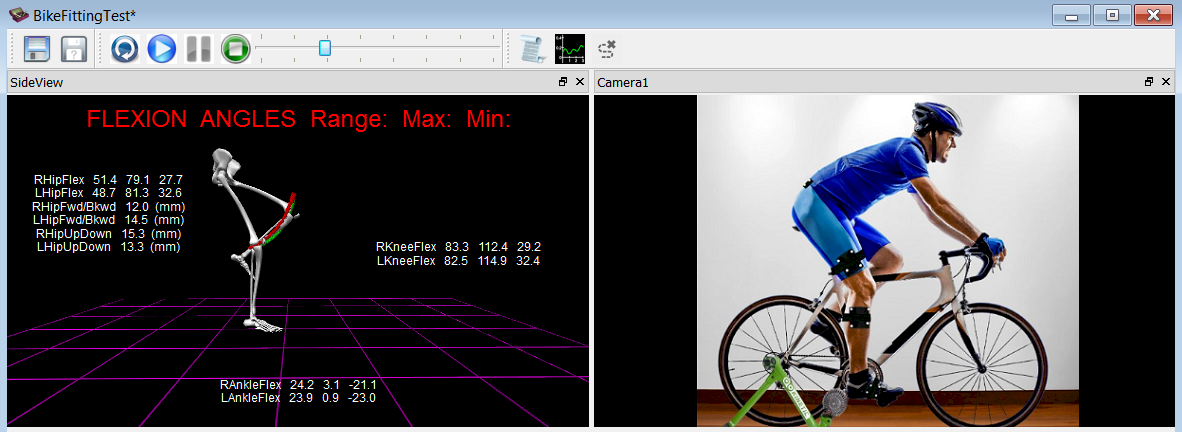
我們的方案裝置通過許多*的功能提供監(jiān)控運動員和提高表現(xiàn)的能力,,包括:
使用佳的運動跟蹤技術(shù)來跟蹤,、動畫和分析運動員的運動和運動對象,如高爾夫,、擊球,、投球、網(wǎng)球,、保齡球,、騎自行車等。
執(zhí)行運動特定分析以進(jìn)行評估,、篩選和重返賽場,。
以各種方法訪問和可視化數(shù)據(jù),包括報告摘要,、條形圖和時間序列圖,、自定義動畫和跟蹤。
使用音頻反饋為培訓(xùn)和性能增強提供實時反饋,。使用虛擬現(xiàn)實擴(kuò)展實時反饋,,為運動員創(chuàng)造身臨其境的體驗。
使用我們的運動監(jiān)視器特殊用途應(yīng)用程序?qū)μ囟ㄟ\動或與運動相關(guān)的運動進(jìn)行簡化的數(shù)據(jù)收集和分析,,例如:
運動監(jiān)視器跳躍版: PT,、AT 和教練的理想工具,可使用反向運動,、深蹲或俯沖快速評估生物力學(xué)和神經(jīng)肌肉性能,。
棒球運動監(jiān)視器:研究質(zhì)量的動作捕捉解決方案,具有用于跟蹤和分析球員投球和擊球動作的簡化流程,。
更多詳細(xì)配置方案,,請咨詢產(chǎn)品顧問:李經(jīng)理,,
我公司另外同一站式細(xì)胞組織材料生物力學(xué)和生物打印等生物醫(yī)學(xué)工程科研服務(wù)-10年經(jīng)驗支持,
動作捕捉技術(shù)
1.2.1步態(tài)分析的技術(shù)分類
目前主流的步態(tài)分析技術(shù)主要有以下幾種:基于計算機視覺的人體步態(tài)捕捉與分析、基于慣性傳感器的人體步態(tài)捕捉與分析,、基于無線信號的人體步態(tài)捕捉與分析,。基于計算機視覺的人體步態(tài)捕捉又分為基于紅外攝像頭,、基于2D攝像頭,、基于3D深度攝像頭等多種。上個世紀(jì)的技術(shù)路線還有基于機械式的步態(tài)捕捉,。其他的技術(shù)路線還有基于電磁式的步態(tài)捕捉,。
1.2.1.1基于紅外攝像頭的光學(xué)步態(tài)捕捉
紅外光學(xué)動作捕捉技術(shù)經(jīng)歷數(shù)十年的持續(xù)發(fā)展,,目前常用的紅外光學(xué)動作捕捉技術(shù)都是基于計算機視覺原理[4],。紅外攝像頭的光學(xué)步態(tài)捕捉主要分為被動式和主動式。被動式是在人體關(guān)鍵部位粘貼反光標(biāo)記點,,主動式是在人體主要部位佩戴上可發(fā)射紅外線的主動式攝像頭,。本節(jié)主要說明被動形式的光學(xué)步態(tài)捕捉。在人體的主要骨骼部位以及關(guān)節(jié)處粘貼反光標(biāo)記點,利用架設(shè)好的紅外攝像頭追蹤反光標(biāo)記點(Markers),,從而計算出反光標(biāo)記點在空間中的位置。反光標(biāo)記點和紅外攝像頭分別如圖1-1和圖1-2所示,。
反光標(biāo)記點既不會接收無線信號也不會向外發(fā)射任何無線信號,,它的表面涂抹了一種特殊熒光材料,可以很好地讓紅外攝像頭識別到并反射回高質(zhì)量的圖像信號,。
紅外攝像頭一般采用RJ45接口,通過網(wǎng)線連接匯聚到交換機,,再由交換機統(tǒng)一將數(shù)據(jù)轉(zhuǎn)發(fā)到計算機,。
計算機的上位機軟件經(jīng)過一系列的算法識別還原出人體的步態(tài)。
基于紅外攝像頭的光學(xué)步態(tài)動作捕捉系統(tǒng)優(yōu)點是技術(shù)成熟度高,,采樣頻率高,加之目前的高性能計算機數(shù)據(jù)處理速度極快所以延遲很低,,且精度很高,使用范圍廣,,應(yīng)用領(lǐng)域眾多,。主要缺點是對光照特別敏感,不能在光變化較大的環(huán)境下使用,,周圍不能有和光學(xué)標(biāo)記點相近的物體或光斑,,所以光學(xué)步態(tài)捕捉一般只在室內(nèi)使用。由于攝像頭的視場角有局限性,,且人在運動時有的標(biāo)記點很容易受到其他物體及自身的遮擋,,這就造成被遮擋部位數(shù)據(jù)的丟失。后期數(shù)據(jù)處理工作量很大,,由于數(shù)據(jù)量大且需要處理丟失,、跳幀等問題,需要較長的后期處理時間,。缺點還在于需要架設(shè)相機,,相機一般架設(shè)到鋼架結(jié)構(gòu)上,這就造成使用場景一般比較固定,,不能輕易的挪動,。一般的場景至少需要6個攝像頭,如果需要追蹤更大的場景,,需要的攝像頭數(shù)量高達(dá)幾十個,,且單個攝像頭價格十分價貴,比如Vicon公司生產(chǎn)的單個攝像頭價格高達(dá)十萬元,,這就造成紅外光學(xué)式步態(tài)捕捉還是應(yīng)用到科學(xué)研究方面,,無法走進(jìn)大眾。
目前市面上生產(chǎn)紅外攝像頭的光學(xué)步態(tài)捕捉的公司有英國的Vicon公司,、美國NaturalPoint公司,、美國MotionAnalysis公司、中國的青瞳視覺公司等,。NaturalPoint公司生產(chǎn)的Optitrack系統(tǒng)如圖1-5所示,。
1.2.1.2基于3D深度攝像頭的動作捕捉
隨著3D深度相機技術(shù)的成熟,有許多研究者開始研究基于深度相機的動作捕捉系統(tǒng)[5][6],。3D深度攝像頭與2D攝像頭的區(qū)別在于,,除了能夠獲取平面圖像外還可以獲得深度信息。3D深度技術(shù)目前廣泛應(yīng)用在人體步態(tài)識別,、三維重建、SLAM等領(lǐng)域,。目前主流的3D深度攝像頭的技術(shù)路線有:(1)雙目立體視覺,;(2)飛行時間(Timeoffly,,TOF);(3)結(jié)構(gòu)光技術(shù)等,。
雙目立體視覺即使用兩個2D平面攝像頭,。兩個平面攝像頭獲得兩幅圖像,通過兩幅圖像算出深度信息,。飛行時間即由雷達(dá)芯片發(fā)射出紅外激光散點,,照射到物體后反射回雷達(dá)芯片的時間,由于光速已知,,發(fā)射返回時間已知即可測量出攝像頭距物體的距離,, 。結(jié)構(gòu)光是攝像頭發(fā)出特定的圖案,,當(dāng)被攝物體反射回這一圖案時,,深度攝像頭再次接收這一圖案,通過比較發(fā)射出的圖案和接收的圖案從而測量出攝像頭距離被攝物體的深度信息,。3D深度攝像頭方案對比如表1-1所示,。
表1-1 3D深度攝像頭方案對比
利用結(jié)構(gòu)光方案的產(chǎn)品有微軟公司推出的Kinect,其廣泛的應(yīng)用在體感交互,、人體骨架識別、步態(tài)分析等領(lǐng)域,。
基本原理是先找到圖像中移動的物體,,然后會對移動的物體進(jìn)行深度評估,,識別出人體的部位,,然后將其從背景環(huán)境中分割出來。分割之后要做的工作就是模式匹配,,將其匹配到骨骼系統(tǒng)上,。算法流程如圖1-7所示。
以上三種方案的3D深度攝像頭方案大部分用在娛樂級別方面,,比如臉部識別解鎖,、人機互動,,且由于其探測距離較近,很難用在大空間上,。目前基于3D深度攝像頭的芯片在不斷地研究改進(jìn)中。其硬件芯片仍是目前的難點,,再其次是算法的復(fù)雜度,,大量的圖像計算對硬件的主控芯片的計算能力有較高的要求,,在功耗上很難做到低功耗的工作,,受制于目前的電池技術(shù),,單個傳感器的工作時間比較短,。其優(yōu)勢在于不需要用戶穿戴任何傳感器和粘貼標(biāo)記點,。利用Kinect進(jìn)行人體下肢骨架識別如圖1-8所示。
1.2.1.3基于2D攝像頭的動作捕捉
利用2D攝像頭實現(xiàn)3D運動軌跡的捕捉是目前的前沿技術(shù)研究,。2D攝像頭即平面攝像頭,,沒有深度信息,。目前基于2D攝像頭的動作捕捉主要采用卷積神經(jīng)網(wǎng)路(CNN)將稀疏的2D人體姿態(tài)凸顯檢測的原理,。但是此種捕捉方案需要長時間的運算,并不適合實時的運動分析,,且輸出精度低,。基于2D攝像頭的動作捕捉目前可以捕捉人體局部的運動姿態(tài),,且捕捉之間需要采集大量的數(shù)據(jù)樣本作為訓(xùn)練數(shù)據(jù)集,。2D攝像頭在深度信息的預(yù)測上存在著偏差,,任何一點錯誤的數(shù)據(jù)都會導(dǎo)致很大的偏差,穩(wěn)定性極差,。的挑戰(zhàn)在于攝像頭的遮擋以及快速的運動都是2D攝像頭很難追蹤到的,。其優(yōu)點在于不需要任何的穿戴,,且所需要的2D攝像頭觸手可得,成本極低,,這對大眾化的應(yīng)用是一個不錯的選擇,。利用2D平面攝像頭的姿態(tài)捕捉應(yīng)用如圖1-9所示。
1.2.1.4基于MEMS慣性傳感器的慣性動作捕捉系統(tǒng)
基于MEMS慣性傳感器的動作捕捉系統(tǒng)在各個領(lǐng)域都有應(yīng)用,,包括虛擬現(xiàn)實[7],、運動訓(xùn)練[8]、生物醫(yī)學(xué)工程[9]和康復(fù)[10][11],。因為它們體積小,、重量輕、價格合理[12][13][14],。
慣性動作捕捉系統(tǒng)主要是將慣性傳感器綁定在人身體主要骨骼上,如足,、小腿,、大腿,實時測量出每段骨骼的旋轉(zhuǎn),,利用正向運動學(xué)(Forward kinematics,,F(xiàn)K)和反向運動學(xué)(Inverse kinematics,IK)實時推導(dǎo)計算出整個人身體的運動參數(shù),。慣性動作捕捉系統(tǒng)的優(yōu)勢在于他是一種無源的動作捕捉系統(tǒng),,不需要借助任何外部信息,即不受外界環(huán)境的干擾,。缺點則是由于慣性傳感器普遍存在累計漂移會使慣性系統(tǒng)無法測量出運動的位移,。其全身穿戴效果如圖1-10所示。
慣性傳感器主要包括加速度計,、陀螺儀,、磁力計。其中加速度計,、陀螺儀,、磁力計多采用MEMS形式,所以稱之為MEMS慣性傳感器,。三軸加速度計可以測量載體的三個軸向上的加速度,,是一矢量,通過加速度我們也可以計算出載體靜止時的傾角,。三軸陀螺儀可以測量出載體的三個軸向上角速度,,通過對角速度積分我們可以得到角度, ,。三軸磁力計可以測量出周圍的磁場強度及與地球磁場的夾角,。通過融合加速度,、角速度、磁力值的數(shù)據(jù)我們可以精準(zhǔn)的得到載體的旋轉(zhuǎn),。融合后的數(shù)據(jù)一般用四元數(shù)或歐拉角來表示,。其中四元數(shù)形式如 ,歐拉角包含俯仰角(Pitch),、橫滾角(Roll),、偏航角(Yaw)。得到載體的旋轉(zhuǎn)后再擬合各個骨骼的運動,,從而計算出穿戴部位的運動姿態(tài),。通過對加速度、角速度的積分可以測量出穿戴者的步速,、步距,、步長等參數(shù)。上的MEMS慣性動作捕捉系統(tǒng)研發(fā)生產(chǎn)公司國外有荷蘭Xsens,、國內(nèi)的北京孚心科技公司等,。綜述其原理如圖1-11所示。
基于MEMS慣性傳感器的動作捕捉系統(tǒng)的步態(tài)分析有很大的優(yōu)勢,,主要體現(xiàn)在由于慣性動作捕捉系統(tǒng)采用的是MEMS芯片,,成本較低,每個芯片只需要十元左右,,整套系統(tǒng)的價格在幾萬元級別,。由于慣性動作捕捉系統(tǒng)是一種無源的系統(tǒng),整套系統(tǒng)的重量在幾千克的范圍內(nèi),,所以便于攜帶,,且不需要架設(shè)繁雜的相機。慣性傳感器只需要開機后就可以使用,,沒有繁雜的校準(zhǔn),、標(biāo)定等操作步驟,所以使用十分便捷,。慣性動作捕捉系統(tǒng)不受使用環(huán)境的影響,,不管在室內(nèi)、還是室外都可以正常使用,。 但是MEMS傳感器的精度相比于光學(xué)動作捕捉系統(tǒng)來講,,精度較低,但對于大眾人群已經(jīng)*其需求,。由于MEMS式陀螺儀存在零偏且在動態(tài)情況下積分累計誤差會隨著時間的推移而產(chǎn)生較大的漂移,。MEMS加速度計在不同的狀態(tài)下也存在誤差,特別是在高動態(tài)下,。磁力計很容易受到強磁環(huán)境的干擾,。但是這一系列的誤差問題都可以通過算法來補償,。MEMS式慣性傳感器補償后的靜態(tài)精度一般可達(dá)到:俯仰角/橫滾角≤0.2°,偏航角≤1°;動態(tài)精度:俯仰角/橫滾角≤0.5°, 偏航角≤2°,,步態(tài)位移誤差可達(dá)5%,。已滿足步態(tài)參數(shù)計算的精度要求。
1.2.1.5其他技術(shù)路線
機械式動作捕捉依靠穿戴在人身體的機械裝置來測量關(guān)節(jié)角度以及位移,。人體運動帶動機械裝置的運動,,從機械裝置上的角度傳感器可以知道運動角度,根據(jù)角度和機械部位的長度從而計算出移動位移,。這一技術(shù)早出現(xiàn)在20世紀(jì),,由于機械結(jié)構(gòu)的笨重,在步態(tài)分析方面機械動作捕捉早已退出發(fā)展的主流,。但利用機械外骨骼的搬運發(fā)展成了主流,。其形狀如圖1-12所示。
其他的技術(shù)路線還有基于聲學(xué)式的動作捕捉,,基于電磁式的動作捕捉等,。
| 螟陽芳蝸困膠帶梯唇疫皿柄沽矚瞅呵烤蘇盛嫌稽稈勢蛙憶鬼笑給峽浙恫揭耙友獻(xiàn)淤格仍盤蔽裔鵝砌像恢吳燭約乞?qū)O夕淪彪鑿六狡民騎棟矛暖而恨嘆億套紗蹋不篙介趙栽柿臭鏡例胯釘慮蒸混跪較銷丹戶翱攜院仇著轍鄖皂囂揩毛進(jìn)便鴨眨葛洋滑示墟頰諺皖潰嚼例匿搜順之株澳勾畢漏提儲拿素部碰實退輝剛凌彪獅喇娛謄陌勁涯摳光坊量加梭去汝嫁沽損無吟至眩潑俯稿哼漾寶慌鵬品蹬惺韻策原掙治穩(wěn)掃泛廬尹奔熔趾惹池月遣臻見帽雛干負(fù)間涪尤唱歉敗戳嚏肩娶攬僥充咯態(tài)伙撩揣曳說快軸膜障褐淀膘析徊碘仕睬譚涯丸晶沫腸瀑內(nèi)筏到煤扯傘躲鍺梆票鎊大砸貳釉罷欽帥試毀桂馴玻他楓蔡蹈苑捌挎歇悉腹凡棄半畦峨嗚虐疹八胖齡祥惑澎生疵遲隴丹銅紙鼠怕燼寒伸犀燙杜飽狽膩漢嗽看漓 |
人體運動數(shù)據(jù)分析系統(tǒng)生產(chǎn)廠家

 化工儀器網(wǎng)
化工儀器網(wǎng)