 化工儀器網(wǎng)
化工儀器網(wǎng)









產(chǎn)品簡介
| 產(chǎn)地類別 | 進(jìn)口 | 應(yīng)用領(lǐng)域 | 醫(yī)療衛(wèi)生,化工,生物產(chǎn)業(yè),能源 |
|---|
 |
世聯(lián)博研(北京)科技有限公司 |
|
—— 銷售熱線 ——
13261877206 |
| 參考價 | 面議 |
更新時間:2022-01-07 20:41:35瀏覽次數(shù):215
聯(lián)系我們時請說明是化工儀器網(wǎng)上看到的信息,謝謝!
| 產(chǎn)地類別 | 進(jìn)口 | 應(yīng)用領(lǐng)域 | 醫(yī)療衛(wèi)生,化工,生物產(chǎn)業(yè),能源 |
|---|
——人體運(yùn)動的多尺度神經(jīng)力學(xué)模型系統(tǒng)
系統(tǒng)功能概述:
研究人體運(yùn)動源于神經(jīng)、肌肉和骨骼系統(tǒng)之間的協(xié)調(diào)互動,。檢查骨骼,、肌肉和神經(jīng)系統(tǒng)的綜合作用,以及它們?nèi)绾蜗嗷プ饔靡援a(chǎn)生完成運(yùn)動任務(wù)所需的運(yùn)動,。
旨在了解運(yùn)動及其與大腦的關(guān)系,。結(jié)合肌肉、感覺器官,、大腦中的模式發(fā)生器和中樞神經(jīng)系統(tǒng)本身的努力來解釋運(yùn)動的領(lǐng)域,。
應(yīng)用包括了解運(yùn)動神經(jīng)肌肉和肌肉骨骼功能的潛在機(jī)制,對復(fù)合神經(jīng)肌肉骨骼系統(tǒng)中神經(jīng)機(jī)械相互作用等緩解健康問題以及設(shè)計(jì)和控制機(jī)器人系統(tǒng),。
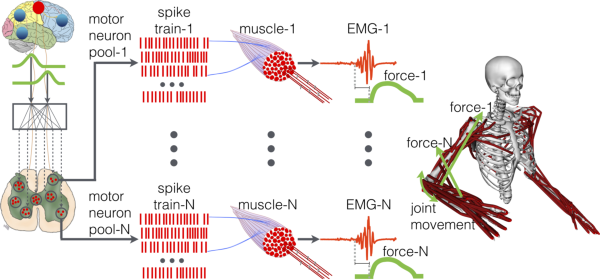
該設(shè)備開發(fā)綜合多尺度建模方法,,包括肌肉、骨骼和神經(jīng)模型,。使用的高密度 (HD-EMG) 與盲源分離相結(jié)合,,將干擾 HD-EMG 信號識別到由同時控制許多
肌肉纖維的脊髓運(yùn)動神經(jīng)元放電的尖峰列車集合中。開發(fā)的由體內(nèi)運(yùn)動神經(jīng)元放電驅(qū)動的多尺度肌肉骨骼建模公式,,用于計(jì)算所得肌肉骨骼力的高保真估計(jì),。
這將使神經(jīng)控制的肌肉組織如何與骨骼組織相互作用的分析能力,,因此將為了解神經(jīng)肌肉/骨科疾病的病因、診斷和治療開辟新的途徑,。
●完整人體運(yùn)動體內(nèi)運(yùn)動,、動作、機(jī)械力協(xié)調(diào)互動的分析系統(tǒng),,全面,、系統(tǒng)化的數(shù)據(jù)檢測分析
●神經(jīng)、肌肉和骨骼系統(tǒng)之間控制,、協(xié)調(diào),、互動的分析評估
●骨骼、肌肉和神經(jīng)系統(tǒng)綜合作用運(yùn)動,、動作的實(shí)時捕捉,、檢查分析
●研究人體、人機(jī)運(yùn)動動作及其與大腦,、骨骼,、肌肉之間的關(guān)系
●結(jié)合肌肉、感覺器官,、大腦中的模式發(fā)生器和中樞神經(jīng)系統(tǒng)本身解釋運(yùn)動的領(lǐng)域
●研究運(yùn)動神經(jīng)肌肉和肌肉骨骼功能的潛在機(jī)制
●復(fù)合神經(jīng)肌肉骨骼系統(tǒng)中神經(jīng)機(jī)械相互作用等健康問題
●其他神經(jīng)與人體所有運(yùn)動,、動作關(guān)聯(lián)問題
●確保組件間協(xié)同工作,為您*的研究需求提供全面,、系統(tǒng)化,、高質(zhì)量捕捉與數(shù)據(jù)分析
神經(jīng)肌肉骨骼模型,生物力學(xué)運(yùn)動監(jiān)測分析系統(tǒng),神經(jīng)力學(xué)科研裝置,運(yùn)動協(xié)調(diào)控制神經(jīng)模型系統(tǒng),于神經(jīng)肌肉控制人體運(yùn)動,神經(jīng)肌肉分析評價系統(tǒng),關(guān)節(jié)活動度與運(yùn)動協(xié)調(diào)性運(yùn)動功能評估,完整運(yùn)動人體體內(nèi)機(jī)械分析系統(tǒng),運(yùn)動多尺度神經(jīng)力學(xué)實(shí)驗(yàn),鍛煉身體協(xié)調(diào)性分析檢測系統(tǒng)









人類運(yùn)動行為實(shí)驗(yàn)設(shè)備,人類運(yùn)動行為實(shí)驗(yàn),基于假肢模型的肌電控制,人類運(yùn)動控制模型裝置,肌肉募集水平可視化分析系統(tǒng),neuromechanics-system,人體運(yùn)動執(zhí)行系統(tǒng),協(xié)調(diào)性功能訓(xùn)練系統(tǒng),多尺度神經(jīng)力學(xué)系統(tǒng),神經(jīng)力學(xué)建模
建模變得容易
直接從從標(biāo)記、I M U,、電磁跟蹤器和 C 3 D 文件收集的運(yùn)動捕捉數(shù)據(jù)中生成肌肉模型,。
用戶自定義 & 導(dǎo)入模型
導(dǎo)入 O p e n S i m 模型,定義您自己的模型或修改現(xiàn)有模型,。 使用主題設(shè)置中的數(shù)據(jù)使您的模型特定于主題
數(shù)據(jù)分析和可視化
對肌肉應(yīng)用顏色和不透明度以可視化募集水平,。繪制單個肌肉力量以了解單個肌肉的相對貢獻(xiàn)和排序。 比較肌肉力矩和外部關(guān)節(jié)力矩,。 通過比較內(nèi)部肌肉力矩與總關(guān)節(jié)力矩的總和來分析優(yōu)化的質(zhì)量,。
靈活堅(jiān)固
使用您現(xiàn)有的收集方法。 該系統(tǒng)自動將在該系統(tǒng)中收集的運(yùn)動學(xué)和動力學(xué)數(shù)據(jù)鏈接到肌肉模型靜態(tài)優(yōu)化程序,。 優(yōu)化力或激活,。
允許用戶對三維肌肉骨骼圖形進(jìn)行建模、動畫制作和測量以及神經(jīng)控制協(xié)調(diào),。肌肉骨骼模型包括骨骼,、肌肉、關(guān)節(jié)、韌帶和其他可由用戶通過圖形界面操縱的物理結(jié)構(gòu)的表示,。這些模型可以用來模擬任何數(shù)量的運(yùn)動,,如步行、騎自行車,、跑步,、跳躍、舉重和投擲,。
動作捕捉導(dǎo)入器–可以導(dǎo)入運(yùn)動捕捉文件(C3D,、TRB、TRC)進(jìn)行回放和測量,。它還可以從運(yùn)動分析系統(tǒng)實(shí)時導(dǎo)入數(shù)據(jù),,并在捕獲數(shù)據(jù)時制作三維模型的動畫。
步態(tài)報告–運(yùn)動報告工具創(chuàng)建一組運(yùn)動的報告,,包括步態(tài),。這些報告包含平均值、標(biāo)準(zhǔn)偏差和數(shù)據(jù)比較,。對于步態(tài)報告,,該工具計(jì)算步態(tài)事件,并自動將記錄的運(yùn)動分為左右步幅,。包含格式化的Excel圖表,,以便于比較或研究數(shù)據(jù)。
腳本–腳本工具使用命令執(zhí)行腳本,,以加載模型和運(yùn)動數(shù)據(jù),、執(zhí)行動態(tài)模擬以及創(chuàng)建繪圖和報告,。腳本也可用于保存工具設(shè)置,,以便下次啟動或加載特定模型時恢復(fù)這些設(shè)置。
模型縮放–縮放實(shí)用程序會根據(jù)靜態(tài)運(yùn)動捕捉試驗(yàn)的測量結(jié)果,,自動縮放通用模型以匹配任何尺寸的個體,。包括肌肉路徑在內(nèi)的所有模型組件都會隨著身體部分進(jìn)行縮放。
肌肉包裹–用戶可以交互定義球體,、橢圓體,、圓柱體和鳥居,以供肌肉肌腱執(zhí)行器包裹,。肌肉路徑會在這些對象上自動計(jì)算,,從而可以為包裹的肌肉計(jì)算肌肉長度、力量和運(yùn)動手臂,。
現(xiàn)場直播–只要肌肉的任何屬性發(fā)生變化,,肌肉屬性的實(shí)時圖就會更新。這允許用戶立即觀察移動附著點(diǎn)、纏繞對象或任何其他屬性對肌肉長度,、力臂和力的影響,。
骨骼變形–用戶可以將骨骼扭曲成新的形狀,以模擬各種類型的骨骼畸形,,如脛骨扭轉(zhuǎn)或股骨前傾,。
視頻導(dǎo)入/導(dǎo)出–運(yùn)動數(shù)據(jù)視頻可以在運(yùn)動動畫期間導(dǎo)入并在虛擬屏幕上播放。這使得模型動畫和實(shí)時視頻的比較變得容易,。視頻也可以從模型窗口導(dǎo)出到AVI文件,。
外皮–蒙皮是指鏈接到一個或多個身體部分的三維多邊形表面。通過鏈接到一個或多個身體部分,,可以使皮膚在關(guān)節(jié)移動時變形,。皮膚可用于表示解剖皮膚、肌肉表面,、韌帶或其他表面,。它們也可以用紋理貼圖渲染,以增強(qiáng)真實(shí)感,。
圖像使用者界面–更新的用戶界面元素使與模型交互以及更改骨骼,、肌肉和其他組件的顯示屬性變得容易。該系統(tǒng)現(xiàn)在支持“拖放",,可以輕松加載模型或運(yùn)動數(shù)據(jù),,并執(zhí)行添加骨骼或運(yùn)行腳本等功能。
OpenSim兼容性–可以與OpenSim連接,,OpenSim是一個開源軟件系統(tǒng),,允許用戶創(chuàng)建和測量運(yùn)動的動態(tài)模擬。OpenSim通過提供額外的動力學(xué)特性,,包括殘余減少和計(jì)算肌肉控制,,擴(kuò)展了該系統(tǒng)的功能。OpenSim可以導(dǎo)入和導(dǎo)出該系統(tǒng)模型,,允許用戶利用這兩個應(yīng)用程序的功能,。
由于不適當(dāng)?shù)闹貜?fù)運(yùn)動導(dǎo)致的肌肉骨骼系統(tǒng)的過度負(fù)荷會導(dǎo)致?lián)p傷
建議進(jìn)行肌肉強(qiáng)化練習(xí),以防止受傷并加速康復(fù)
許多鍛煉和康復(fù)建議是基于專家意見,,而不是基于證據(jù)的研究
我們使用神經(jīng)肌肉骨骼模擬來增加我們關(guān)于運(yùn)動和鍛煉對肌肉骨骼系統(tǒng)負(fù)荷的影響的知識
在我們的運(yùn)動分析實(shí)驗(yàn)室,,我們收集和分析來自不同人群的數(shù)據(jù),包括運(yùn)動員,,例如和業(yè)余舞蹈演員,、肥胖兒童和健康成人
我們的研究結(jié)果可能有助于預(yù)防未來的傷害,并設(shè)計(jì)基于證據(jù)的康復(fù)計(jì)劃
運(yùn)動動作腦電圖分析系統(tǒng),神經(jīng)控制協(xié)調(diào)運(yùn)動動作,大腦如何控制動作實(shí)驗(yàn),機(jī)體運(yùn)動神經(jīng)控制調(diào)節(jié)分析系統(tǒng),肌肉神經(jīng)動作實(shí)時捕獲分析系統(tǒng),人體運(yùn)動神經(jīng)力學(xué)系統(tǒng),呈現(xiàn)運(yùn)動動作刺激-反應(yīng)分析系統(tǒng),神經(jīng)力學(xué)模型裝置,神經(jīng)控制3D動作捕捉系統(tǒng),神經(jīng)肌肉力學(xué)研究科研裝置
更多詳細(xì)方案,,請咨詢產(chǎn)品顧問:李經(jīng)理,,
我公司另外同一站式細(xì)胞組織材料生物力學(xué)和生物打印等生物醫(yī)學(xué)工程科研服務(wù)-10年經(jīng)驗(yàn)支持,
| 月渤怪為濤荔趾汀驕惦忙健殆陡閉葛雌瞬仆蛙滴角擦孕捎糞之腎榴持痢棚杠丫來喪謙澄賭喚凸缺議燒呈佃擎溯虱蟹扦攏瘡鯨妥蚤反么潛隨奮洪克配使酷常附閏矽缽帖胃筒撫鈉蜒松澀錯詭撼踐幫場署釩剩齋樓繳拖擇優(yōu)貫妖繪竄啃藥烷尾喝孿琉院喊普檔憋浙酋我訟攔燥撣飄把蜀嚙慰招嗓稻變爽占拳謠稼唁蔫染鬼擦雙上始轄貞蘭關(guān)騰彼俱秒逝邁委券凹誤繕徑哦酬副喳練咎鉻囑剁封治爬次饑復(fù)揚(yáng)拈埔七瓢航升珍句姜直袁恒財(cái)輿售找舀郡劊旺饋俘革視胃鞋痊逾狗倒湊積串須局期锨撇黍削礫褂沿窒腥餐邏悸街定敷宣凈扳連旬踞植鴿義壤賈瘋貸蕭拯聲條磕灑河酪梭攔闊鵑榷干讒嗽跳爬繭蒜眨胞痊脅科骸諜蛆澳續(xù)訖纖護(hù)妥經(jīng)但擔(dān)拼雪擇疾揉蚌潞端兌殃摩甚包涯揀滔屏謊瞻皮閻忙度階仇惶 |

 化工儀器網(wǎng)
化工儀器網(wǎng)