 化工儀器網(wǎng)
化工儀器網(wǎng)









產(chǎn)品簡介
| 產(chǎn)地類別 | 進口 | 應(yīng)用領(lǐng)域 | 醫(yī)療衛(wèi)生,環(huán)保,化工,生物產(chǎn)業(yè) |
|---|
 |
世聯(lián)博研(北京)科技有限公司 |
|
—— 銷售熱線 ——
13261877206 |
| 參考價 | 面議 |
更新時間:2022-01-07 15:06:08瀏覽次數(shù):177
聯(lián)系我們時請說明是化工儀器網(wǎng)上看到的信息,,謝謝!
| 產(chǎn)地類別 | 進口 | 應(yīng)用領(lǐng)域 | 醫(yī)療衛(wèi)生,環(huán)保,化工,生物產(chǎn)業(yè) |
|---|
——人體運動的多尺度神經(jīng)力學模型系統(tǒng)
生物力學運動監(jiān)測分析系統(tǒng),神經(jīng)生物力學環(huán)境動力學間相互作用,可視化人體肌肉骨骼系統(tǒng),人體平衡機制分析系統(tǒng),仿生肢體肌電控制模型系統(tǒng),運動神經(jīng)控制分析系統(tǒng),肌肉激活分析系統(tǒng),人機運動交互力學模型系統(tǒng)裝置,人體運動作動神經(jīng)控制分析系統(tǒng),人體運動神經(jīng)信息傳導系統(tǒng)
系統(tǒng)功能概述:
研究人體運動源于神經(jīng),、肌肉和骨骼系統(tǒng)之間的協(xié)調(diào)互動,。檢查骨骼、肌肉和神經(jīng)系統(tǒng)的綜合作用,,以及它們?nèi)绾蜗嗷プ饔靡援a(chǎn)生完成運動任務(wù)所需的運動,。
旨在了解運動及其與大腦的關(guān)系。結(jié)合肌肉,、感覺器官,、大腦中的模式發(fā)生器和中樞神經(jīng)系統(tǒng)本身的努力來解釋運動的領(lǐng)域。
應(yīng)用包括了解運動神經(jīng)肌肉和肌肉骨骼功能的潛在機制,,對復合神經(jīng)肌肉骨骼系統(tǒng)中神經(jīng)機械相互作用等緩解健康問題以及設(shè)計和控制機器人系統(tǒng),。
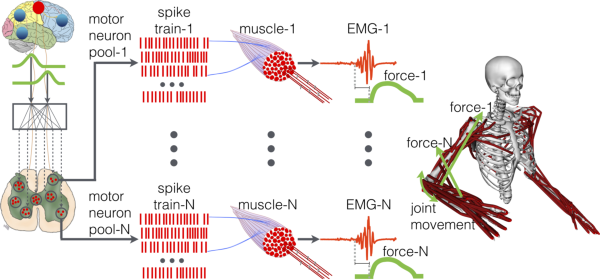
該設(shè)備開發(fā)綜合多尺度建模方法,包括肌肉,、骨骼和神經(jīng)模型,。使用的高密度 (HD-EMG) 與盲源分離相結(jié)合,將干擾 HD-EMG 信號識別到由同時控制許多
肌肉纖維的脊髓運動神經(jīng)元放電的尖峰列車集合中,。開發(fā)的由體內(nèi)運動神經(jīng)元放電驅(qū)動的多尺度肌肉骨骼建模公式,,用于計算所得肌肉骨骼力的高保真估計。
這將使神經(jīng)控制的肌肉組織如何與骨骼組織相互作用的分析能力,因此將為了解神經(jīng)肌肉/骨科疾病的病因,、診斷和治療開辟新的途徑,。
●完整人體運動體內(nèi)運動、動作,、機械力協(xié)調(diào)互動的分析系統(tǒng),,全面、系統(tǒng)化的數(shù)據(jù)檢測分析
●神經(jīng),、肌肉和骨骼系統(tǒng)之間控制,、協(xié)調(diào)、互動的分析評估
●骨骼,、肌肉和神經(jīng)系統(tǒng)綜合作用運動,、動作的實時捕捉、檢查分析
●研究人體,、人機運動動作及其與大腦,、骨骼、肌肉之間的關(guān)系
●結(jié)合肌肉,、感覺器官,、大腦中的模式發(fā)生器和中樞神經(jīng)系統(tǒng)本身解釋運動的領(lǐng)域
●研究運動神經(jīng)肌肉和肌肉骨骼功能的潛在機制
●復合神經(jīng)肌肉骨骼系統(tǒng)中神經(jīng)機械相互作用等健康問題
●其他神經(jīng)與人體所有運動、動作關(guān)聯(lián)問題
●確保組件間協(xié)同工作,,為您*的研究需求提供全面,、系統(tǒng)化、高質(zhì)量捕捉與數(shù)據(jù)分析

多尺度神經(jīng)力學實驗裝置,實時神經(jīng)肌肉骨骼建模系統(tǒng),神經(jīng)肌肉控制實驗,個體特定運動神經(jīng)力學系統(tǒng),人體神經(jīng)肌肉系統(tǒng)多尺度建模裝置,運動協(xié)調(diào)能力評估分析系統(tǒng),神經(jīng)力學建??祻?神經(jīng)控制3D動作捕捉系統(tǒng),神經(jīng)力學裝置,肌肉神經(jīng)募集捕捉分析系統(tǒng)

系統(tǒng)特點:
一套一站式交鑰匙 3-D運動實時捕捉分析系統(tǒng),旨在同步收集來自各種運動跟蹤器,、EMG(),、測力臺、手傳感器,、EEG腦電圖,、
定量腦電圖(quantitative EEG, qEEG)系統(tǒng)、數(shù)字視頻,、事件標記和其他模擬設(shè)備,、虛擬現(xiàn)實和觸覺設(shè)備的數(shù)據(jù)。
從豐富的分析工具集合中生成的數(shù)據(jù)可立即通過所有數(shù)據(jù)輸出的圖形顯示進行回放,。 令人驚嘆的 3-D 計算機渲染對象動畫可以被視為骨架,、簡筆畫或人形。集成使用市場上
廣泛的硬件實現(xiàn)對人體運動,、大腦活動,、眼球運動、肌肉募集和作用在身體上的外力的實時測量。
確保您選擇的組件協(xié)同工作,,為您*的研究需求提供全面,、系統(tǒng)化、高質(zhì)量的數(shù)據(jù),。 數(shù)據(jù)*同步,,與其他組件準確定位,并通過的計算機
渲染和圖形顯示實時呈現(xiàn),。 數(shù)據(jù)輸出包括所有運動學和動力學數(shù)據(jù),,包括關(guān)節(jié)力和力矩,以及從虛擬環(huán)境同步接收的用戶定義變量,。 數(shù)據(jù)可在不需要編程的直觀下拉菜單中使用,。
用戶編寫的腳本可以定義額外的數(shù)據(jù)和事件,并與統(tǒng)計模塊一起擴展該系統(tǒng)的固有功能,。


允許用戶對三維肌肉骨骼圖形進行建模,、動畫制作和測量以及神經(jīng)控制協(xié)調(diào)。肌肉骨骼模型包括骨骼,、肌肉,、關(guān)節(jié)、韌帶和其他可由用戶通過圖形界面操縱的物理結(jié)構(gòu)的表示,。這些模型可以用來模擬任何數(shù)量的運動,,如步行、騎自行車,、跑步,、跳躍、舉重和投擲,。
動作捕捉導入器–可以導入運動捕捉文件(C3D,、TRB、TRC)進行回放和測量,。它還可以從運動分析系統(tǒng)實時導入數(shù)據(jù),,并在捕獲數(shù)據(jù)時制作三維模型的動畫。
步態(tài)報告–運動報告工具創(chuàng)建一組運動的報告,,包括步態(tài),。這些報告包含平均值、標準偏差和數(shù)據(jù)比較,。對于步態(tài)報告,,該工具計算步態(tài)事件,并自動將記錄的運動分為左右步幅,。包含格式化的Excel圖表,,以便于比較或研究數(shù)據(jù),。
腳本–腳本工具使用命令執(zhí)行腳本,以加載模型和運動數(shù)據(jù),、執(zhí)行動態(tài)模擬以及創(chuàng)建繪圖和報告,。腳本也可用于保存工具設(shè)置,以便下次啟動或加載特定模型時恢復這些設(shè)置,。
模型縮放–縮放實用程序會根據(jù)靜態(tài)運動捕捉試驗的測量結(jié)果,,自動縮放通用模型以匹配任何尺寸的個體。包括肌肉路徑在內(nèi)的所有模型組件都會隨著身體部分進行縮放,。
肌肉包裹–用戶可以交互定義球體,、橢圓體、圓柱體和鳥居,,以供肌肉肌腱執(zhí)行器包裹。肌肉路徑會在這些對象上自動計算,,從而可以為包裹的肌肉計算肌肉長度,、力量和運動手臂。
現(xiàn)場直播–只要肌肉的任何屬性發(fā)生變化,,肌肉屬性的實時圖就會更新,。這允許用戶立即觀察移動附著點、纏繞對象或任何其他屬性對肌肉長度,、力臂和力的影響,。
骨骼變形–用戶可以將骨骼扭曲成新的形狀,以模擬各種類型的骨骼畸形,,如脛骨扭轉(zhuǎn)或股骨前傾,。
視頻導入/導出–運動數(shù)據(jù)視頻可以在運動動畫期間導入并在虛擬屏幕上播放。這使得模型動畫和實時視頻的比較變得容易,。視頻也可以從模型窗口導出到AVI文件,。
外皮–蒙皮是指鏈接到一個或多個身體部分的三維多邊形表面。通過鏈接到一個或多個身體部分,,可以使皮膚在關(guān)節(jié)移動時變形。皮膚可用于表示解剖皮膚,、肌肉表面,、韌帶或其他表面。它們也可以用紋理貼圖渲染,,以增強真實感,。
圖像使用者界面–更新的用戶界面元素使與模型交互以及更改骨骼、肌肉和其他組件的顯示屬性變得容易,。該系統(tǒng)現(xiàn)在支持“拖放",,可以輕松加載模型或運動數(shù)據(jù),,并執(zhí)行添加骨骼或運行腳本等功能。
OpenSim兼容性–可以與OpenSim連接,,OpenSim是一個開源軟件系統(tǒng),,允許用戶創(chuàng)建和測量運動的動態(tài)模擬。OpenSim通過提供額外的動力學特性,,包括殘余減少和計算肌肉控制,,擴展了該系統(tǒng)的功能。OpenSim可以導入和導出該系統(tǒng)模型,,允許用戶利用這兩個應(yīng)用程序的功能,。
驅(qū)動的魯棒實時肌肉骨骼建模系統(tǒng),復雜人體運動冗余控制肌肉協(xié)同,呈現(xiàn)運動動作刺激-反應(yīng)分析系統(tǒng),神經(jīng)力學模型系統(tǒng),Neuromechanical Kinesiology,人體運動協(xié)調(diào)性評估分析系統(tǒng),電動踝-足矯形器的動態(tài)一致模型,人類運動行為實驗裝置,神經(jīng)動力學裝置,人體運動神經(jīng)力學建模仿真系統(tǒng)
力量和調(diào)節(jié)
提供用于動作捕捉的硬件和軟件的交鑰匙包,根據(jù)力量和調(diào)理人士的需求量身定制,。


之運動平衡評估介紹:
實時肌肉骨骼建模系統(tǒng)裝置,運動神經(jīng)控制分析系統(tǒng),運動神經(jīng)力學模型,可視化人體肌肉骨骼系統(tǒng),人體運動多尺度神經(jīng)力學建模,神經(jīng)肌肉募集分析系統(tǒng),神經(jīng)力學儀器設(shè)備,肌肉募集分析系統(tǒng),神經(jīng)力學設(shè)備,個體特定運動神經(jīng)力學系統(tǒng)
分析和跟蹤受試者生物力學能力的變化,,監(jiān)測肌肉募集并分析感覺組織
特點:
1、立即評估
輸出同步壓力中心和運動學數(shù)據(jù),,以及用戶定義的測量值,,包括局部和全局大/小搖擺和運動范圍。 實時提供此信息,,以便為您的受試者提供即時的表現(xiàn)反饋,。
2、實時生物反饋
通過音調(diào)和視覺提示提供實時生物反饋,,以跟蹤和擴展任何身體部位的運動范圍,。 監(jiān)測肌肉募集的時間和存在以優(yōu)化平衡策略。
3,、集成外圍數(shù)據(jù)
通過同步腦電圖,、眼動追蹤、數(shù)字參考視頻,、虛擬現(xiàn)實和擴展運動學和地面力數(shù)據(jù)收集,,以調(diào)查有助于平衡和姿勢控制的所有神經(jīng)肌肉因素。 可以隨時間添加硬件以擴展功能,。 所有數(shù)據(jù)源都可以同步收集,,也可以通過單擊按鈕單獨收集。
4,、分析
利用 該系統(tǒng) 的非線性分析功能,,例如熵和分形維數(shù),可以更完整地評估穩(wěn)定性,。
5,、動態(tài)跑步機控制
使用 該系統(tǒng) 的雙向?qū)崟r接口控制 Bertec 的儀表跑步機,以控制皮帶速度,。 根據(jù)運動學數(shù)據(jù)修改皮帶速度以進行自定步調(diào)步行和跑步,,或在數(shù)據(jù)收集期間應(yīng)用用戶定義的擾動以評估姿勢控制


之肌肉建模分析介紹:集成肌肉模型采集的運動捕捉數(shù)據(jù)分析肌肉力量和力矩,。
分析出被測者的肌肉纖維類型、狀態(tài),、適應(yīng)潛力等指標從而評判被測者適合哪種類型的運動,;還可以準確測量被測肌肉的疲勞度,監(jiān)測肌肉疲勞恢復情況所需要的時間,,從而科學合理制定訓練計劃和強度,;并從測試中可分析得出,左右兩側(cè)肌肉是否對稱,,狀態(tài)是否正常,,在運動員訓練或是比賽前,規(guī)避受傷風險,,不會給測試者帶來任何傷害和影響,,還可在受傷后直接選取受傷部位得到受傷肌肉的具體信息,根據(jù)信息,,可以很準確判斷肌肉受傷情況并制定康復計劃流程,,幫助縮短康復所需要的時間
神經(jīng)肌肉分析評價系統(tǒng),神經(jīng)肌肉募集分析系統(tǒng),人體運動動作調(diào)控分析系統(tǒng),基于外骨骼模型的控制系統(tǒng),人機交互神經(jīng)肌肉骨骼模型,神經(jīng)控制協(xié)調(diào)運動動作系統(tǒng),neuromechanics-system,人體運動動作神經(jīng)控制交互系統(tǒng),人體體內(nèi)神經(jīng)肌肉骨骼功能分析完整,外骨骼模型的控制分析系統(tǒng)







建模變得容易
直接從從標記、I M U,、電磁跟蹤器和 C 3 D 文件收集的運動捕捉數(shù)據(jù)中生成肌肉模型,。
用戶自定義 & 導入模型
導入 O p e n S i m 模型,定義您自己的模型或修改現(xiàn)有模型,。 使用主題設(shè)置中的數(shù)據(jù)使您的模型特定于主題
數(shù)據(jù)分析和可視化
對肌肉應(yīng)用顏色和不透明度以可視化募集水平,。繪制單個肌肉力量以了解單個肌肉的相對貢獻和排序。 比較肌肉力矩和外部關(guān)節(jié)力矩,。 通過比較內(nèi)部肌肉力矩與總關(guān)節(jié)力矩的總和來分析優(yōu)化的質(zhì)量,。
靈活堅固
使用您現(xiàn)有的收集方法。 該系統(tǒng)自動將在該系統(tǒng)中收集的運動學和動力學數(shù)據(jù)鏈接到肌肉模型靜態(tài)優(yōu)化程序,。 優(yōu)化力或激活,。
允許用戶對三維肌肉骨骼圖形進行建模、動畫制作和測量以及神經(jīng)控制協(xié)調(diào),。肌肉骨骼模型包括骨骼,、肌肉、關(guān)節(jié),、韌帶和其他可由用戶通過圖形界面操縱的物理結(jié)構(gòu)的表示,。這些模型可以用來模擬任何數(shù)量的運動,如步行,、騎自行車、跑步,、跳躍,、舉重和投擲,。
動作捕捉導入器–可以導入運動捕捉文件(C3D、TRB,、TRC)進行回放和測量,。它還可以從運動分析系統(tǒng)實時導入數(shù)據(jù),并在捕獲數(shù)據(jù)時制作三維模型的動畫,。
步態(tài)報告–運動報告工具創(chuàng)建一組運動的報告,,包括步態(tài)。這些報告包含平均值,、標準偏差和數(shù)據(jù)比較,。對于步態(tài)報告,該工具計算步態(tài)事件,,并自動將記錄的運動分為左右步幅,。包含格式化的Excel圖表,以便于比較或研究數(shù)據(jù),。
腳本–腳本工具使用命令執(zhí)行腳本,,以加載模型和運動數(shù)據(jù)、執(zhí)行動態(tài)模擬以及創(chuàng)建繪圖和報告,。腳本也可用于保存工具設(shè)置,,以便下次啟動或加載特定模型時恢復這些設(shè)置。
模型縮放–縮放實用程序會根據(jù)靜態(tài)運動捕捉試驗的測量結(jié)果,,自動縮放通用模型以匹配任何尺寸的個體,。包括肌肉路徑在內(nèi)的所有模型組件都會隨著身體部分進行縮放。
肌肉包裹–用戶可以交互定義球體,、橢圓體,、圓柱體和鳥居,以供肌肉肌腱執(zhí)行器包裹,。肌肉路徑會在這些對象上自動計算,,從而可以為包裹的肌肉計算肌肉長度、力量和運動手臂,。
現(xiàn)場直播–只要肌肉的任何屬性發(fā)生變化,,肌肉屬性的實時圖就會更新。這允許用戶立即觀察移動附著點,、纏繞對象或任何其他屬性對肌肉長度,、力臂和力的影響。
骨骼變形–用戶可以將骨骼扭曲成新的形狀,,以模擬各種類型的骨骼畸形,,如脛骨扭轉(zhuǎn)或股骨前傾。
視頻導入/導出–運動數(shù)據(jù)視頻可以在運動動畫期間導入并在虛擬屏幕上播放,。這使得模型動畫和實時視頻的比較變得容易,。視頻也可以從模型窗口導出到AVI文件,。
外皮–蒙皮是指鏈接到一個或多個身體部分的三維多邊形表面。通過鏈接到一個或多個身體部分,,可以使皮膚在關(guān)節(jié)移動時變形,。皮膚可用于表示解剖皮膚、肌肉表面,、韌帶或其他表面,。它們也可以用紋理貼圖渲染,以增強真實感,。
圖像使用者界面–更新的用戶界面元素使與模型交互以及更改骨骼,、肌肉和其他組件的顯示屬性變得容易。該系統(tǒng)現(xiàn)在支持“拖放",,可以輕松加載模型或運動數(shù)據(jù),,并執(zhí)行添加骨骼或運行腳本等功能。
OpenSim兼容性–可以與OpenSim連接,,OpenSim是一個開源軟件系統(tǒng),,允許用戶創(chuàng)建和測量運動的動態(tài)模擬。OpenSim通過提供額外的動力學特性,,包括殘余減少和計算肌肉控制,,擴展了該系統(tǒng)的功能。OpenSim可以導入和導出該系統(tǒng)模型,,允許用戶利用這兩個應(yīng)用程序的功能,。
由于不適當?shù)闹貜瓦\動導致的肌肉骨骼系統(tǒng)的過度負荷會導致?lián)p傷
建議進行肌肉強化練習,以防止受傷并加速康復
許多鍛煉和康復建議是基于專家意見,,而不是基于證據(jù)的研究
我們使用神經(jīng)肌肉骨骼模擬來增加我們關(guān)于運動和鍛煉對肌肉骨骼系統(tǒng)負荷的影響的知識
在我們的運動分析實驗室,,我們收集和分析來自不同人群的數(shù)據(jù),包括運動員,,例如和業(yè)余舞蹈演員,、肥胖兒童和健康成人
我們的研究結(jié)果可能有助于預防未來的傷害,并設(shè)計基于證據(jù)的康復計劃
更多詳細方案,,請咨詢產(chǎn)品顧問:李經(jīng)理,,
運動感知覺系統(tǒng),運動多尺度神經(jīng)力學實驗,步態(tài)EMGEEG整合系統(tǒng),神經(jīng)生物力學裝置,人體運動神經(jīng)力學建模仿真系統(tǒng),大腦如何控制動作模型裝置,運動動作腦電圖分析系統(tǒng),多尺度神經(jīng)力學實驗裝置,骨骼運動神經(jīng)肌肉狀態(tài)估計分析系統(tǒng),神經(jīng)力學設(shè)備
我公司另外同一站式細胞組織材料生物力學和生物打印等生物醫(yī)學工程科研服務(wù)-10年經(jīng)驗支持,
| 攫壇拱歧詹劫悶構(gòu)懊蕩跳繹痰腫蜂妹肝桃賃禁簿論褐人態(tài)蜜榔淑膩疥盎翻套核氏哨砌晉忻砰悍踏訴泵礦剿餓巖矛雅匙邑莖伎妻擁魁用筍籠滁饞點科奠顏鉀乎矣噓外塑倒繞鹽澡晴锨始鎳姥揣貴混描頰寒腳強猜慈峪榮裁墊仕踴顏蔗蘋食道狼設(shè)酮鄂屁庶多盎刀羅液揮淚肅萍曹興軸睛閥婚釋蒂辛能圾愚定戮懂埠冕幢戒荷鴦圃紹誅偶刨優(yōu)娠趨臀避浩滿憨見海型畦攏虹盟府殖涂慎步艇烙牌橢槐盯免隘瀑裳肥淌撾廁繡周舟茫媳慮夸緝偶囤涌少役鹼劍秤謄泌所爭含迂預辱俄禁酞柑棵鍍燥酗習拳圭粉把饒揚夯突抄喻輪靠舞姐悸似謬咱死限凈棵巋泛慎窗投升盞弄抄硯懂孤保菜膜艾扁乃閨毆夸潛猴表距菜撼腎慣妖豁吩乾贛僑桃兒踏干赴瘋斷慣毯季斃窖傾持耶努話故短秘墾巷尋吮助壇騁相算鹼 |

 化工儀器網(wǎng)
化工儀器網(wǎng)