 您好, 歡迎來(lái)到化工儀器網(wǎng)
您好, 歡迎來(lái)到化工儀器網(wǎng)










| 應(yīng)用領(lǐng)域 | 環(huán)保,電子 |
|---|
西門子主機(jī) 西門子模組 西門子卡件模塊 西門子DP接頭 西門子通訊西門子EM模塊
西門子SM模塊 西門子AI模塊 西門子DI模塊 西門子AO模塊 DO模塊
西門子NCU573.5B
 |
| 參考價(jià) | 面議 |
更新時(shí)間:2022-09-06 10:09:01瀏覽次數(shù):200
聯(lián)系我們時(shí)請(qǐng)說(shuō)明是化工儀器網(wǎng)上看到的信息,,謝謝!
 |
|
|
|
|
公司主營(yíng):西門子PLC,人機(jī)界面,數(shù)控系統(tǒng),,變頻器,,低壓,伺服電機(jī),,電源,,軟啟動(dòng),電線電纜,,網(wǎng)卡,,工控機(jī),直流調(diào)試裝置
西門子200PLC,300PLC,400PLC,1200PLC,1500PLC.可編程控制器,,及附件銷售代理
公司優(yōu)勢(shì):產(chǎn)品全,,存貨量大,,原裝德國(guó)進(jìn)口產(chǎn)品,歡迎咨詢?cè)儍r(jià),。
1.1 電子齒輪比的作用
電子齒輪比就是對(duì)伺服接收到的上位機(jī)脈沖頻率進(jìn)行放大或者縮小,。其中一個(gè)參數(shù)為分子,為電機(jī)編碼器的分辨率,;一個(gè)為分母,,為電機(jī)旋轉(zhuǎn)一圈所需要的脈沖數(shù)。如果分子大于分母就是放大,,如果分子小于分母就是縮小,。
在 實(shí)際應(yīng)用中,連接不同的機(jī)械結(jié)構(gòu),,移動(dòng)小單位量所需的電機(jī)轉(zhuǎn)動(dòng)量是不同的,,例如:同樣一個(gè)伺服電機(jī),如果連接了一個(gè)螺距為10mm的絲杠,,那么電機(jī)轉(zhuǎn)一 圈機(jī)械移動(dòng)10mm,,每移動(dòng)0.001mm就需要電機(jī)轉(zhuǎn)1/10000圈;而如果連接螺距為5mm的絲杠,,每移動(dòng)0.001mm需要電機(jī)轉(zhuǎn)1/5000 圈,。而電機(jī)編碼器的分辨率是相同的,因此可以通過(guò)設(shè)置電子齒輪比來(lái)使電機(jī)脈沖數(shù)和機(jī)械小移動(dòng)量相匹配,,這就是電子齒輪比的作用,。 1.2 相關(guān)概念介紹
(1)編碼器分辨率:伺服電機(jī)軸旋轉(zhuǎn)編碼器反饋脈沖數(shù)。
V90的伺服電機(jī)有增量編碼器和值編碼器,,其分辨率如下圖:
圖01. V90伺服電機(jī)編碼器的分辨率
(2)每轉(zhuǎn)脈沖數(shù):絲杠轉(zhuǎn)動(dòng)一圈所需脈沖數(shù),。
(3)小長(zhǎng)度單位(LU):上位機(jī)發(fā)出一個(gè)脈沖時(shí),絲杠移動(dòng)的直線距離或旋轉(zhuǎn)軸轉(zhuǎn)動(dòng)的度數(shù),,也是控制系統(tǒng)所能控制的小距離,。這個(gè)值越小,經(jīng)各種補(bǔ)償后越容易得到更高的加工精度和表面質(zhì)量,。當(dāng)進(jìn)給速度滿足要求的情況下,,可以設(shè)定較小的長(zhǎng)度單位。也稱作“脈沖當(dāng)量”,。
(4)螺距:螺紋上相鄰兩牙對(duì)應(yīng)點(diǎn)之間的軸向距離,。
西門子NCU573.5B
2.1 V90電子齒輪比的設(shè)置
V90電子齒輪比的設(shè)置方法如圖2所示:
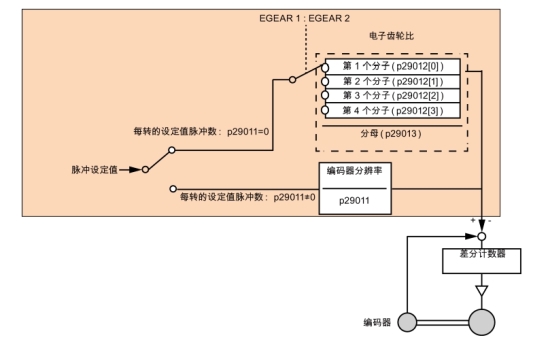 圖02. V90的電西門子NCU573.5B子齒輪比設(shè)置
圖02. V90的電西門子NCU573.5B子齒輪比設(shè)置
從圖中可以看出V90的電子齒輪比的設(shè)置有兩種方法,這兩種方法的本質(zhì)都是算出編碼器分辨率與期望每轉(zhuǎn)脈沖數(shù)的比值,。
(1)電子齒輪比=編碼器分辨率 / P29011,。P29011即為期望每轉(zhuǎn)脈沖數(shù);
(2)當(dāng)P29011設(shè)定為0時(shí),,電子齒輪比=P29012 / P29013,。
這幾個(gè)參數(shù)的說(shuō)明如圖3所示: 
圖03. 相關(guān)參數(shù)說(shuō)明
四個(gè)電子齒輪比分子可通過(guò)數(shù)字量輸入信號(hào)的組合EGEAR1和EGEAR2來(lái)選擇,,如圖4所示:

圖4. 電子齒輪比分子的選擇
還有兩點(diǎn)需要注意的是:
(1)電子齒輪比的取值范圍是0.02到200;
(2)僅可在伺服關(guān)閉狀態(tài)下設(shè)置電子齒輪比,。
2.2電子齒輪比的計(jì)算及舉例
比如有一套機(jī)械系統(tǒng),,如圖5所示: 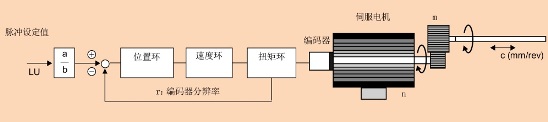
圖05. 機(jī)械系統(tǒng)
其中:a/b為電子齒輪比;
LU為小長(zhǎng)度單位,;
r為編碼器分辨率,;
i= n/m為機(jī)械減速比(n電機(jī)側(cè)轉(zhuǎn)速,m負(fù)載側(cè)轉(zhuǎn)速),;
c為絲杠螺距,。
那么期望每轉(zhuǎn)脈沖數(shù)d的計(jì)算:

電子齒輪比計(jì)算:

計(jì)算電子齒輪比的實(shí)例:

圖06. 電子齒輪比計(jì)算實(shí)例
再比如:
PLC的大脈沖頻率為200KHz,電機(jī)的額定轉(zhuǎn)速為3000rpm,,伺服電機(jī)編碼器分辨率是524288,;絲杠螺距是10mm(沒(méi)有減速箱),。
問(wèn):如果電子齒輪比是1,,伺服電機(jī)的大轉(zhuǎn)速?
答:PLC 控制伺服電機(jī)能達(dá)到的大轉(zhuǎn)速=200×1000×60/524288=22.89rpm
問(wèn):PLC發(fā)出大脈沖頻率,,如何通過(guò)設(shè)置V90的電子齒輪比才能讓電機(jī)以額定轉(zhuǎn)速運(yùn)行,?
答:電機(jī)額定轉(zhuǎn)速3000rpm=50r/s,50r/s時(shí)的脈沖頻率:50×524288=26214400,,
因此電子齒輪比=26214400/(200×1000)=524288/4000(設(shè)置P29011=4000),。 附:

圖07. 西門子PLC的大脈沖頻率
S7路由功能示例:
下圖給出了一個(gè)PG通過(guò)以太網(wǎng)路由到PROFIBUS網(wǎng)絡(luò)的例子。
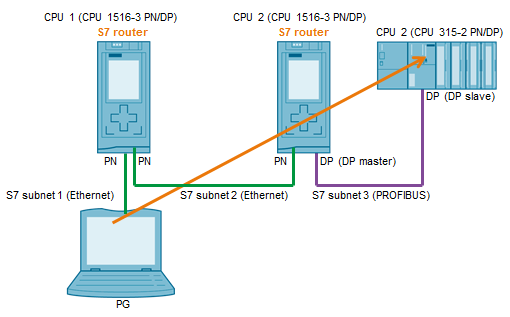
圖1
S7 路由功能的要求
SIMATIC S7 CPU
以下列表中列舉了支持S7路由功能的 SIMATIC S7 CPU,。
SIMATIC S7 FM模塊
下面列表中的SIMATIC S7 FM模塊支持 S7 路由功能,。
FM | Version | Article number |
|---|---|---|
| FM 356-4V5.0 | V5.0 | 6ES7356-4BM00-0AE0 |
| FM 356-4V5.0 | V5.0 | 6ES7356-4BN00-0AE0 |
| FM 456-2 | V5.0 | 6ES7456-2AA00-0AB0 |
表 01
網(wǎng)關(guān)
下面列表中列出了支持 S7 路由功能的網(wǎng)關(guān),。
Link | Version | Article number |
|---|---|---|
| IE/PB Link | V1.0 and higher | 6GK1411-5AA00 |
| IE/PB Link PNIO | V1.0 and higher | 6GK1411-5AB00 |
| IWLAN/PB Link PNIO | V1.1 and higher | 6GK1417-5AB00 |
| IWLAN/PB Link PNIO | V1.1 and higher | 6GK1417-5AB01 |
表02
SIMATIC S7 IM 模塊
下面列表中列出了支持 S7 路由功能的 SIMATIC S7 IM 模塊。
IM | Version | Article number |
|---|---|---|
| IM 467 | V2.0 and higher | 6ES7467-5GJ02-0AB0 |
| IM 467-FO | V2.0 and higher | 6ES7467-5FJ00-0AB0 |
表03
SIMATIC WinAC RTX, WinAC Slot 和 WinAC MP
下面列表中列出了支持 S7 路由功能的 SIMATIC WinAC RTX, WinAC Slot and WinAC MP,。
| WinAC | Version | Article number |
|---|---|---|
| WinAC RTX | V4.0 and higher | 6ES7671-0R... |
| WinAC Slot 412 | V3.2 and higher | 6ES7673-2C... |
| WinAC Slot 416 | V3.2 and higher | 6ES7673-6C... |
| WinAC MP | V4.1 and higher | 6ES7671-4EE00-0YA0 6ES7671-5EF01-0YA0 6ES7671-7EG01-0YA0 |
表04
SINAUT 通訊模塊
下面列表中列出了支持 S7 路由功能的 SINAUT 通訊模塊,。
| TIM | Version | Article number |
|---|---|---|
| TIM 3V-IE | V1.0 and higher | 6NH7800-3BA00 |
| TIM 3V-IE Advanced | V1.1 and higher | 6NH7800-3CA00 |
| TIM 4R-IE | V1.0 and higher | 6NH7800-4BA00 |
| TIM 4RD | V3.x and higher | 6NH7800-4AD90 |
 |
|
 |
 |
 |