 您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)

 6
6
Allan方差是什么,?(下)
4.Allan偏差
對數(shù)——對數(shù)圖的使用僅僅解決了“計算”部分中描述的一個問題。另一個問題——方差的單位為“平方”,,這使我們無法解釋對數(shù)——對數(shù)圖曲線上對應(yīng)的Y值的概念,。
為了解決這個問題,我們可以使用Allan偏差(標(biāo)準(zhǔn)偏差或標(biāo)準(zhǔn)差)而不是Allan方差,。偏差是方差的平方根,,因此要從Allan方差中得出Allan偏差,只需取上面計算出的每個方差的平方根即可,。這會將數(shù)據(jù)單位改回我們可以直觀理解的單位(即傳感器實際記錄的單位——加速度單位),。
但是,標(biāo)準(zhǔn)偏差的含義比方差要更難理解一點,。方差是數(shù)據(jù)集合的整體分布統(tǒng)計,,而標(biāo)準(zhǔn)差只是數(shù)據(jù)中與平均值接近的68%的數(shù)據(jù)的分布統(tǒng)計。比如,,如果平均值是0,,而標(biāo)準(zhǔn)偏差是正負(fù)5,則該數(shù)據(jù)集的大約32%大于5且小于-5,。因此,,方差告訴你highest和低范圍,標(biāo)準(zhǔn)差僅告訴你大部分?jǐn)?shù)據(jù)位于何處,。
也就是說,偏差圖更一目了然,。
我們可以通過計算Allan方差的平方根,,然后得到如下的Allan偏差圖:
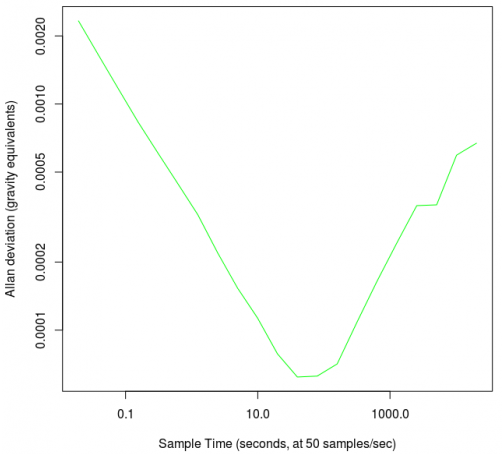
5.如何使用Allan偏差圖
使用Allan偏差圖比較產(chǎn)品或?qū)W習(xí)如何使用傳感器時,可以將圖中的曲線分為四個部分,。當(dāng)然網(wǎng)上還有其他有關(guān)如何解釋這些圖的教程,。為了將不同類型噪聲的影響分開,其中一些教程將Allan偏差圖分成了更多部分,。對于此處的實際討論,,我們省去了有關(guān)不同類型噪聲的許多細(xì)節(jié)。常見的Allan偏差圖的四個部分如下:
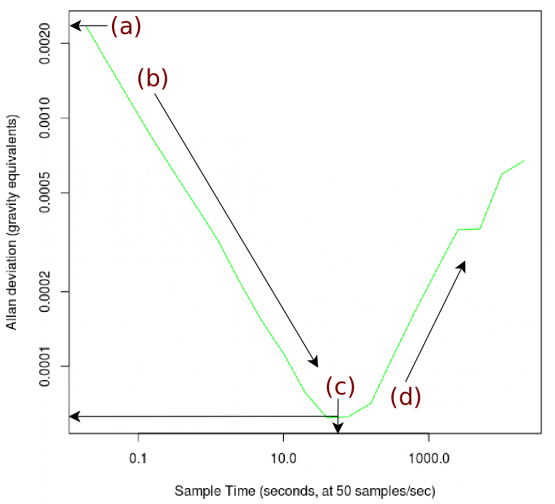
我們將在下面更深入地討論所有這四個部分:
A點——對應(yīng)的Y值是任何一次測量的噪聲的標(biāo)準(zhǔn)偏差,,或者以單個數(shù)據(jù)點間隔為平均時間的噪聲,。
B段——表示隨著平均時間的增長,平均值標(biāo)準(zhǔn)偏差逐漸減小,可用于校正快速波動的噪聲,。
C點——終,,通過延長平均時間,噪聲可以達(dá)到一個小值,。該小值具有用戶感興趣的optimal平均時間X和小系統(tǒng)噪聲(或信噪比為1時的靈敏度)Y值,,C點也就是前文提到的“大信噪比”所需的平均時間。
D段——在較長時間范圍內(nèi)的慢變噪聲或系統(tǒng)漂移占主導(dǎo),,開始影響較大組的平均數(shù)據(jù),。
5.1. A點——單點噪聲
Allan偏差圖的起點是單個點的噪聲標(biāo)準(zhǔn)偏差。因為在圖的開始處,, “組”的大小為1,。因此,組與組之間變化的標(biāo)準(zhǔn)偏差將等于各個點的標(biāo)準(zhǔn)偏差,。因此,,通過對比所計算數(shù)據(jù)集的起始Allan偏差和各個點的標(biāo)準(zhǔn)偏差,可以初步確認(rèn)Allan偏差計算的準(zhǔn)確性,。
請注意,,對于偏差(漂移)不大于白噪聲的情況,上述描述是正確的,。如果偏差隨時間的漂移比短時間內(nèi)白噪聲產(chǎn)生的漂移大,,則數(shù)據(jù)集的標(biāo)準(zhǔn)偏差將是測量偏差,而不是白噪聲標(biāo)準(zhǔn)偏差,。
用于選擇產(chǎn)品
在比較產(chǎn)品時,,A點數(shù)值對需要盡可能少的平均數(shù)據(jù)的應(yīng)用場景有很大價值。即,,用戶需要盡可能多的使用每個數(shù)據(jù)點,,或者需要盡可能多的保留數(shù)據(jù)中的高頻分量。對于大多數(shù)應(yīng)用,,如“噪聲”部分所述,,至少進(jìn)行一些平均是非常有用的。
實際應(yīng)用
使用傳感器時,,此值在嘗試評估單個測量點的噪聲時很有用,。大約68%的測量結(jié)果將產(chǎn)生0.0025g的噪聲誤差,而32%的測量結(jié)果將具有更大的噪聲誤差,。正如“噪聲”部分中所述,,要確定單個測量數(shù)據(jù)點的噪聲是大是小,是正是負(fù),,實際上是不可能的,。因此,,將A點數(shù)值與你期望獲得的測量值幅度進(jìn)行比較,以及噪聲誤差是否會成為測量數(shù)據(jù)的重要分量,,會對實際應(yīng)用非常有幫助,。
5.2. B段——通過平均來改善精度
隨著你可以收集越來越多的數(shù)據(jù),并將它們?nèi)∑骄?,你可以對?shù)據(jù)進(jìn)行精度更高的提取,。
用于選擇產(chǎn)品
要使用從A點的大值到C點的小值的B段區(qū)間,你需要考慮自己的應(yīng)用場景,。你可以合理采樣和平均的時長是多少,?你是否想要每0.1秒獲取讀數(shù)或每1秒一次獲取讀數(shù)?如果你的應(yīng)用試圖在Allan偏差圖中測量相對于噪聲非常小的信號,,則需要在可平均的時間范圍內(nèi),,比較不同產(chǎn)品的Allan偏差圖。
實際應(yīng)用
在可允許的采樣運算時間內(nèi),,通過調(diào)整平均時間的長度,,抑制每單位時間的降噪量,優(yōu)化系統(tǒng)的信噪比,,同時保證系統(tǒng)足夠的響應(yīng)速度,,可以幫助你更準(zhǔn)確的微調(diào)應(yīng)用場景中的數(shù)據(jù)采樣和平均時間間隔。
例如,,在很多四軸飛行器的應(yīng)用中,,通過適當(dāng)平滑加速度計的輸出數(shù)據(jù),以抑制其跳躍性的噪聲,,可以幫助你更準(zhǔn)確地估計GPS讀數(shù)之間的飛行器位置,。對于加速度數(shù)值遠(yuǎn)大于噪聲的情況而言,平均可以稍微平滑這些噪聲,,但不會影響加速度計輸出結(jié)果的準(zhǔn)確性,。因此,只要你感興趣數(shù)據(jù)的價值足夠大,,且平均時間足夠長而不會受到太大影響,,則可以收集到更多的數(shù)據(jù)樣本來更有效地過濾噪聲。這種偏差建模——通過延長平均時間法——允許你沿著B段斜率向下移至一個系統(tǒng)可接受的響應(yīng)平均時間的小值,。
但是,對于測量比采樣頻率更快的振動信號,,這種方法將不再起作用,。
5.3. C點——小偏差(optimal靈敏度)
理論上,此小偏差是傳感器的optimum精度,。實際應(yīng)用中,,即使要達(dá)到這一水平也可能是很困難的,。為此,你必須以約等于小C點的平均時間處理數(shù)據(jù),。這需要非常特定的應(yīng)用程序和采樣策略,。
對于例子中的加速度傳感器,optimum靈敏度大約是每100秒平均一次,,每秒50個采樣,,也即采集5000個點平均一次獲得的。請記住,,optimum靈敏度只是噪聲的標(biāo)準(zhǔn)偏差,,因此,即使在C點的輸出,,也將有大約三分之一的噪聲大于圖中顯示的小值,。
用于選擇產(chǎn)品
Allan偏差圖上的optimal靈敏度值,是比較不同傳感器常用的特征點,。該數(shù)據(jù)點的用途是向你顯示靈敏度optimum的情況,。根據(jù)Allan偏差圖,你可以選擇采取不同的采樣時間,,并且在所需的靈敏度上有多少回旋余地(平均會大大提升傳感器的靈敏度),,但請記住,你的數(shù)據(jù)仍會在C點小值附近產(chǎn)生偏差,。事實上,,在選擇產(chǎn)品時,圖形上的所有點都具有價值的,。
5.4. D段——低頻噪聲
當(dāng)你在此低頻噪聲中僅取一小部分值(例如隨機噪聲)時,,數(shù)值變化會非常小。在越來越大的數(shù)據(jù)組中,,隨機噪聲可能會很大,。該噪聲通常是多個因素的疊加,包括溫度的影響,,振動和隨機游走等,。
像其他噪聲一樣,真正隨機噪聲終將平均為零,。但是,,你將必須收集非常非常長時間的數(shù)據(jù)。足夠長的時間可以保證你的數(shù)據(jù)捕獲任何合理的重復(fù)頻率的隨機噪聲,。但是,,想象一下——假設(shè)你發(fā)現(xiàn)新的小噪聲點超過了數(shù)萬秒的平均時間——你是否真的想對所有這些數(shù)據(jù)進(jìn)行平均以確定小偏差?這樣做,,你會錯過所有來自傳感器的真實,,快速的數(shù)據(jù),,因為你一直都在等待采集足夠的數(shù)據(jù)做長期平均值。
用于選擇產(chǎn)品
即使要在曲線的較早一點進(jìn)行平均,,該圖的這一部分仍然非常重要,。這是由于這樣的事實,無論平均周期如何,,你仍然會經(jīng)歷隨機或溫度依賴形式的低頻噪聲,。想象一下,一組1000個數(shù)據(jù)點的中值在整個過程中緩慢漂移,。如果將每十個數(shù)據(jù)點平均一次,,則可能會減輕大部分白噪聲,但數(shù)據(jù)仍將漂移至以前相同的量,。
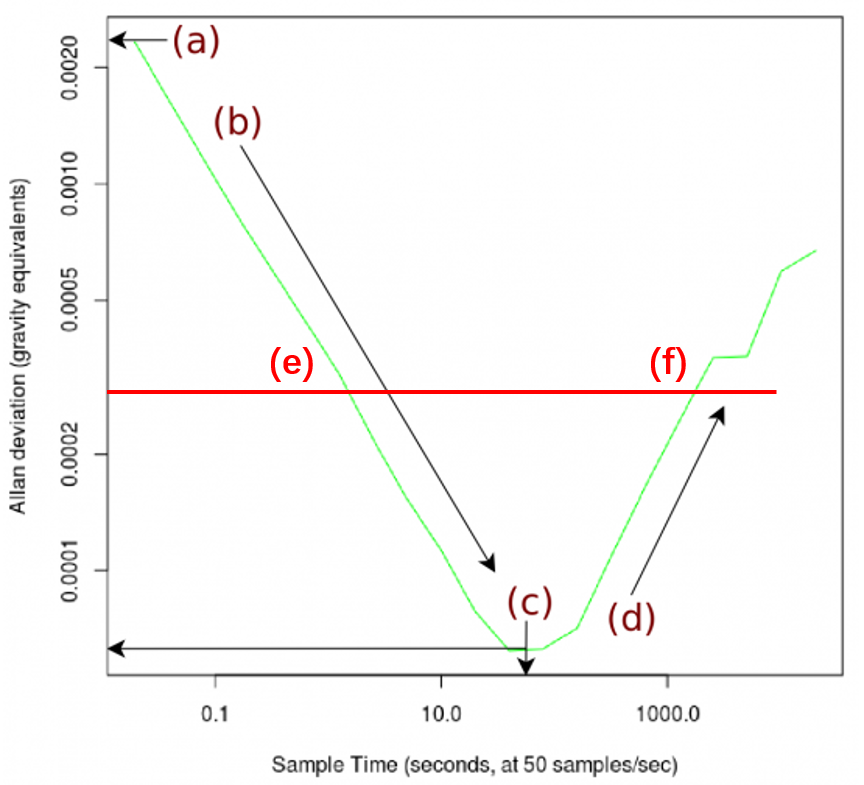
在Allan偏差上做一個與X軸平行的直線,,該線與Allan偏差曲線交于e和f兩點,如下圖所示,。e點和f點雖然平均時間不同,,但是檢測精度其實是相同的。如果這個Allan偏差曲線右端對應(yīng)的Y值高于左端first的Y值,,說明到達(dá)此點時間后,,系統(tǒng)已經(jīng)漂移超過原始未平均的靈敏度。
如果你對傳感器和所收集的數(shù)據(jù)有非常清楚的了解,,則可以使用軟件算法校正和處理低頻噪聲,,但這是很困難的,只能根據(jù)具體情況進(jìn)行,。如果這種操作在你的應(yīng)用中不可行,,則選擇低頻噪聲曲線較淺的傳感器將很有價值。當(dāng)然,,你會發(fā)現(xiàn)傳感器的低頻噪聲與傳感器的成本直接相關(guān),。
6.溫度的影響
當(dāng)溫度變化時,電子系統(tǒng)會經(jīng)歷一定程度的誤差變化(溫飄),,終反映在噪聲特性中,。當(dāng)查看加速計數(shù)據(jù)隨時間變化時,這些溫度影響并不是立即顯而易見的,,例如“測量噪聲”部分中的圖形,。
但是溫漂效應(yīng)和其他較小的難以控制的影響使慣性導(dǎo)航變得極為困難。如果在室溫下記錄加速度計的Allan偏差圖,,則低頻噪聲特性(曲線上的D段)可能不會非常陡峭,。但是,如果你使用相同的加速度計并將其置于動態(tài)溫度環(huán)境中,,則會發(fā)現(xiàn)低頻噪聲曲線將變得更加陡峭或難以預(yù)測,。通過比較這兩個Allan偏差圖,并使所有其他變量保持恒定,,你可以大致確定溫度變化對設(shè)備的影響有多大,。