 您好, 歡迎來(lái)到化工儀器網(wǎng)
您好, 歡迎來(lái)到化工儀器網(wǎng)










| 應(yīng)用領(lǐng)域 | 石油,建材,電子,印刷包裝,綜合 |
|---|
產(chǎn)品簡(jiǎn)介
詳細(xì)介紹
德國(guó)力士樂(lè)速度傳感器R917002704
特征
- 旋轉(zhuǎn)方向檢測(cè)
- 檢測(cè)甚至更低的轉(zhuǎn)速
- 專(zhuān)為移動(dòng)應(yīng)用的苛刻要求而開(kāi)發(fā)
- 汽車(chē)質(zhì)量
- 安裝簡(jiǎn)單,無(wú)需設(shè)置工作
- 當(dāng)前界面
- 霍爾測(cè)量原理
- 測(cè)量范圍1 … 5000赫茲
- 輸出信號(hào)電流方波信號(hào)
- 電源電壓4.5 ... 20伏
- 防護(hù)等級(jí)IP69K
德國(guó)力士樂(lè)速度傳感器R917002704
產(chǎn)品說(shuō)明
基于霍爾效應(yīng)的DSM1-10速度傳感器是專(zhuān)門(mén)為在移動(dòng)工作機(jī)器的惡劣條件下使用而開(kāi)發(fā)的,。傳感器收集鐵磁齒輪或沖片的速度信號(hào)。作為一個(gè)有源傳感器,,當(dāng)它這樣做時(shí),它傳遞一個(gè)與速度無(wú)關(guān)的恒定幅度的信號(hào),。傳感器之所以與眾不同,,不僅是因?yàn)樗梢詸z測(cè)旋轉(zhuǎn)方向,,還因?yàn)樗哂衅渌\斷功能,例如:
靜止檢測(cè)
‐的
臨界氣隙
‐的
關(guān)鍵安裝位置
‐的
應(yīng)用示例
由于其緊湊而堅(jiān)固的設(shè)計(jì),,該傳感器適合集成使用
在用于車(chē)輪速度采集的車(chē)輪軸承中
‐的
在變速器或齒輪級(jí)中
‐的
公共汽車(chē)、卡車(chē)和工程機(jī)械中的風(fēng)扇驅(qū)動(dòng)裝置(7至20千瓦)
‐的
在壓路機(jī)和攤鋪機(jī)的振動(dòng)驅(qū)動(dòng)中
‐的
示例:
帶DSM外齒輪電機(jī)的軸向活塞電機(jī)
框圖
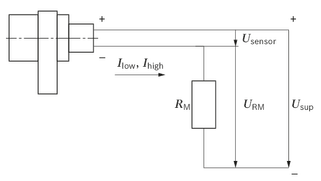
U傳感器 | 傳感器工作電壓 |
U吃晚飯 | 電源電壓 |
URM | 測(cè)量電阻處的信號(hào)電壓 |
i低的,i高的 | 傳感器電流 |
rM | 測(cè)量電阻器 |
雙線電流接口用于信號(hào)傳輸,。傳感器提供電流信號(hào),。低電流(i低的=有源元件的自身電流)被解釋為低信號(hào)。高電流(i高的=i低的+∏i,;∏i=來(lái)自與有源元件平行的路徑的附加電流)被解釋為高電流??刂茊卧性跍y(cè)量電阻處從傳感器接收的電流rM被轉(zhuǎn)換成電壓信號(hào),。評(píng)估電路基于電壓電平檢測(cè)高信號(hào)還是低信號(hào),。
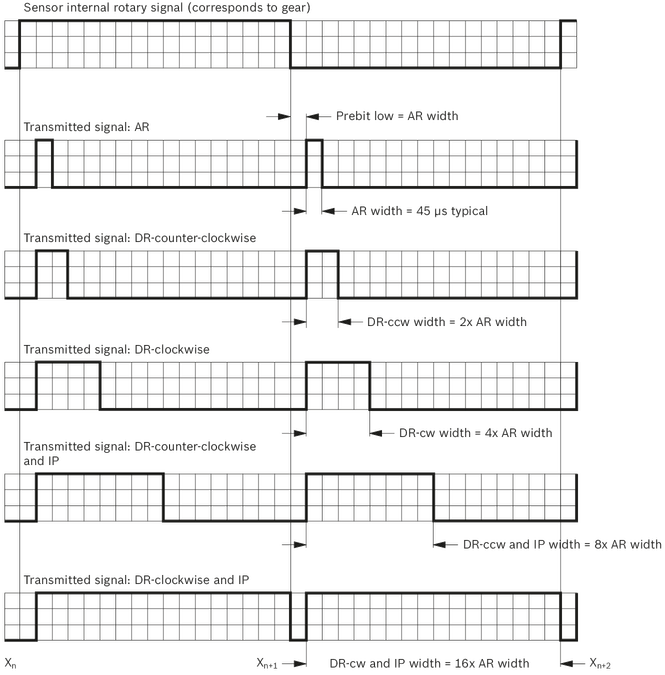
輸出信號(hào)
DSM1-10輸出信號(hào)由DSM1-10評(píng)估電子設(shè)備產(chǎn)生的等幅方波信號(hào)組成,。單個(gè)脈沖的長(zhǎng)度提供了關(guān)于旋轉(zhuǎn)方向和安裝位置任何誤差的信息,。
評(píng)估電子器件在傳感器內(nèi)部速度信號(hào)的每個(gè)邊沿之后產(chǎn)生一個(gè)限定長(zhǎng)度的高脈沖,,由此高脈沖的長(zhǎng)度由要傳輸?shù)男畔⑾薅?。例如,,左邊的信息旋轉(zhuǎn)方向由90秒長(zhǎng)脈沖描述,,右邊的信息旋轉(zhuǎn)方向由180秒長(zhǎng)脈沖描述,。
為了在高速下有長(zhǎng)的高脈沖時(shí)仍然輸出轉(zhuǎn)速信息,低時(shí)間(前位低)總是在高脈沖之前插入,。因此,盡管信號(hào)中的附加信息在較高的轉(zhuǎn)速下丟失(脈沖被低時(shí)間特征截?cái)?,,轉(zhuǎn)速信息的可靠輸出可能達(dá)到大頻率(上游低時(shí)間+短高脈沖),。
如果輸出氣隙儲(chǔ)備信號(hào),,則其他信號(hào)重疊(AR占優(yōu)勢(shì)),即既不輸出旋轉(zhuǎn)方向信號(hào)也不輸出安裝位置信號(hào),。
信號(hào)形狀
氣隙儲(chǔ)備和安裝位置
傳感器對(duì)磁流的變化做出反應(yīng)。如果齒輪和傳感器之間的氣隙過(guò)高,,信號(hào)輸出可能會(huì)受到不利影響:
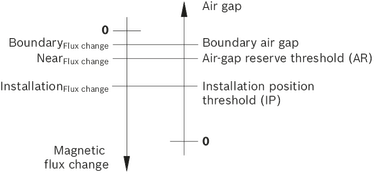
極限范圍極限通量變化
小于極限通量變化對(duì)于磁流變化,,可能會(huì)出現(xiàn)信號(hào)丟失。
近景近景通量變化
不到近通量變化對(duì)于磁流變化,,輸出AR位。
安裝位置安裝通量變化
小于安裝通量變化對(duì)于磁流變化,,輸出IP位。
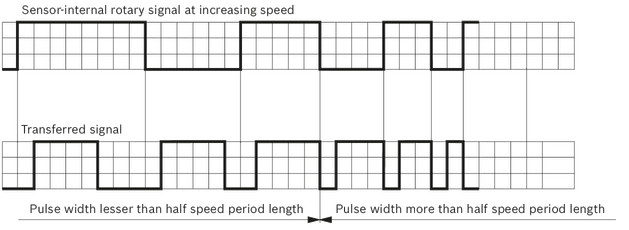
隨著轉(zhuǎn)速增加的行為
隨著轉(zhuǎn)速的增加,,在輸出計(jì)劃長(zhǎng)度的信號(hào)之前,,會(huì)檢測(cè)到車(chē)輪上的下一個(gè)表面,。在這些情況下,,信號(hào)會(huì)縮短,,并且在每個(gè)邊沿覆蓋信號(hào)后會(huì)出現(xiàn)零時(shí)間(45 μs),。這確保了脈沖頻率以及轉(zhuǎn)速始終正確傳輸,。轉(zhuǎn)速信息的丟失并不重要,因?yàn)橛捎诟咿D(zhuǎn)速,,旋轉(zhuǎn)方向在那個(gè)時(shí)間點(diǎn)不能改變。如果旋轉(zhuǎn)速度降低(例如減速直到旋轉(zhuǎn)方向改變),,則信號(hào)再次*輸出,,并且旋轉(zhuǎn)方向的改變被檢測(cè)到。
停滯不前的行為
沒(méi)有檢測(cè)到速度信號(hào)后的傳感器信號(hào)
一秒鐘內(nèi):
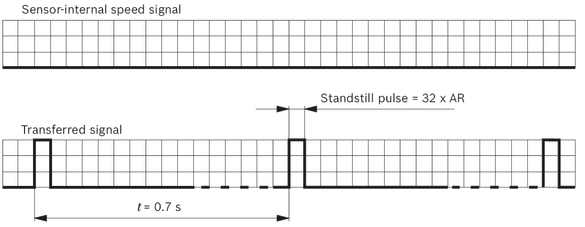
描述
當(dāng)車(chē)輛靜止時(shí),,傳感器每0.7秒輸出1.44毫秒的脈沖,。只要沒(méi)有檢測(cè)到速度信號(hào),,這些脈沖也會(huì)在欠壓后輸出,。
初始化也在靜止?fàn)顟B(tài)下進(jìn)行,。該初始化持續(xù)255到345秒。在此期間無(wú)法檢測(cè)到信號(hào)變化,。
退出靜止和/或啟動(dòng)信號(hào)
當(dāng)確定輸出值(頻率、旋轉(zhuǎn)方向等)時(shí),。),,可能需要一定數(shù)量的脈沖來(lái)確保提供適當(dāng)?shù)男畔ⅰ?/span>
當(dāng)從靜止?fàn)顟B(tài)或欠壓狀態(tài)后啟動(dòng)時(shí),傳感器首先被設(shè)置為未校準(zhǔn)狀態(tài)(信號(hào)未偏移補(bǔ)償),。同樣在該階段,傳感器在第二信號(hào)脈沖開(kāi)始時(shí)提供正確的頻率信號(hào),,并且另外,,在典型條件下,,在第三信號(hào)脈沖時(shí)提供正確的旋轉(zhuǎn)方向信號(hào)。旋轉(zhuǎn)方向的正確輸出多需要七個(gè)齒/邊,,具體取決于安裝位置,。在這種模式下,,磁輸入信號(hào)的小值和大值用作觸發(fā)點(diǎn),。
在非校準(zhǔn)模式下輸出信號(hào)期間,,傳感器對(duì)信號(hào)進(jìn)行校準(zhǔn)(偏移補(bǔ)償)。傳感器然后自動(dòng)切換到校準(zhǔn)模式,。從這一點(diǎn)開(kāi)始,,磁輸入信號(hào)的過(guò)零點(diǎn)被用作觸發(fā)點(diǎn)。切換到校準(zhǔn)模式時(shí),,輸出信號(hào)的相移(大值–90°和/或+90°)可能在極少數(shù)情況下發(fā)生,。
在非校準(zhǔn)模式下輸出的信號(hào)脈沖數(shù)多為五個(gè),。
信號(hào)容差
以下持續(xù)時(shí)間(小值、標(biāo)稱(chēng)值,、大值)由傳感器內(nèi)部元件的公差決定,,適用于各種情況:
脈沖名稱(chēng) | 脈沖寬度t脈搏 | ||||
| 低限度 | 名義上的 | z高的 | ||
預(yù)調(diào)低 | tVorbit | μs | 37 | 45 | 53 |
氣隙儲(chǔ)備 | tAR | μs | 37 | 45 | 53 |
逆時(shí)針旋轉(zhuǎn)方向 | t醫(yī)生-《特定常規(guī)武器公約》 | μs | 74 | 90 | 106 |
順時(shí)針旋轉(zhuǎn)方向 | t災(zāi)難恢復(fù)連續(xù)波 | μs | 149 | 180 | 211 |
逆時(shí)針旋轉(zhuǎn)方向和安裝位置信號(hào)1) | t災(zāi)難恢復(fù)-特定常規(guī)武器公約/知識(shí)產(chǎn)權(quán) | μs | 298 | 360 | 422 |
順時(shí)針旋轉(zhuǎn)方向和安裝位置信號(hào)1) | t災(zāi)難恢復(fù)-連續(xù)波/知識(shí)產(chǎn)權(quán) | μs | 597 | 720 | 843 |
停頓 停止 | t脈沖停止 | μs | 1194 | 1440 | 1685 |
靜止檢測(cè) | t停止 | 女士 | 611 | 737 | 863 |
| 1) | 脈沖日間行車(chē)燈/日間行車(chē)燈和/或日間行車(chē)燈-連續(xù)行車(chē)燈/日間行車(chē)燈僅在信號(hào)頻率約為1/2時(shí)輸出,。117赫茲。高于該頻率,,該脈沖隨后被較短的災(zāi)難恢復(fù)常規(guī)武器和/或?yàn)?zāi)難恢復(fù)連續(xù)波取代。 |
振動(dòng)
靜止時(shí)編碼器輪的振動(dòng)會(huì)產(chǎn)生傳感器錯(cuò)誤信號(hào),。
在控制單元的應(yīng)用
力士樂(lè)博達(dá)控制器的應(yīng)用
DSM1-10可通過(guò)以下BODAS控制單元讀取:RC系列21、22,、30和31,。
注意:
應(yīng)考慮所用生化需氧量控制單元的當(dāng)前數(shù)據(jù)表,。
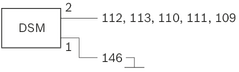
RC2-2/21
2個(gè)輸入
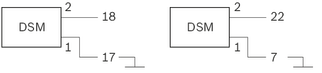
RCE12-4/22
2個(gè)輸入
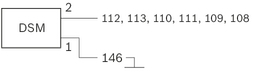
RC28-14/30,RC20-10/30,,RC12-10/30
5個(gè)輸入
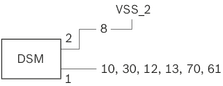
RC36-20/30
6個(gè)輸入
RC10-10/31
6個(gè)輸入
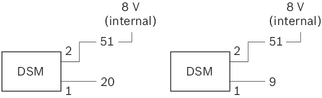
與其他控制單元一起應(yīng)用
基本用途
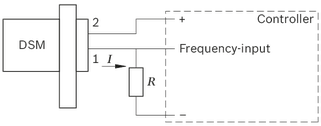
電流i以脈沖形式提供傳感器信息(參見(jiàn)“輸出信號(hào)”章節(jié)或詳細(xì)信息),,其低電平和高電平如下:
i | 低限度 | 名義上的 | z高的 | |
i低的 | 媽 | 5.9 | 7 | 8.4 |
i高的 | 媽 | 11.8 | 14 | 16.8 |
小脈沖寬度為52秒,相當(dāng)于10千赫的頻率,。
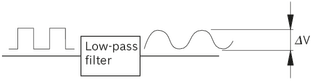
為了解釋信號(hào),必須確保在30千赫輸入頻率下,,信號(hào)(在任何低通濾波器出現(xiàn)后)仍然具有足夠的電壓差(δv)用于評(píng)估。
電阻器r產(chǎn)生出現(xiàn)在遙控控制單元頻率輸入端的電壓,。
例如r= 200ω時(shí),讀取以下電壓:
U投入 (r= 200ω) | 低限度 | 名義上的 | z高的 | |
U低的 | V | 1.18 | 1.4 | 1.68 |
U高的 | V | 2.36 | 2.8 | 3.36 |
要安裝的電阻器r必須這樣選擇:
控制單元內(nèi)部信號(hào)評(píng)估的電壓差足夠了,。
‐的
電阻器上的大電壓r不會(huì)變得工具高(適用于傳感器電源),,因此傳感器引腳處至少存在4.5 V電壓。
‐的
如果滿(mǎn)足這些條件,,并且信號(hào)存在于控制單元內(nèi)部,則可以確定傳感器信息,。
角速度
由于DSM的特性,即輪齒的兩側(cè),,車(chē)輪的實(shí)際速度差確定如下
f車(chē)輪=f閱讀/ 2
速度、臨界氣隙,、靜止
為了確定這一信息,,必須測(cè)量脈沖的長(zhǎng)度,。例如,這可以在控制單元中通過(guò)測(cè)量脈沖的開(kāi)始和結(jié)束時(shí)間來(lái)完成,。
然而,在沒(méi)有這種評(píng)估的情況下,,總是可以從頻率中讀取速度,。然而,應(yīng)始終考慮靜止?fàn)顟B(tài)下的行為(每0.7秒1.44毫秒),。可以檢測(cè)到脈沖過(guò)長(zhǎng)(1.44毫秒),。
詳情點(diǎn)擊:力士樂(lè)速度傳感器