聯(lián)系電話

上海殷德電氣有限公司
 中級會員·7年
中級會員·7年
- 聯(lián)系人:
- 方園
- 電話:
- 021-51089719
- 手機(jī):
- 13524819926
- 傳真:
- 021-51089719 企業(yè)QQ:690531563
- 地址:
- 上海市普陀區(qū)大渡河路1142弄1號樓
- 個(gè)性化:
- www.inde-electrical.com
- 網(wǎng)址:
- www.inde-electrical.com
掃一掃訪問手機(jī)商鋪
要了解兩者的區(qū)別,,我們需要先對每一個(gè)對象都要深入了解一 下。 首先了解一下工作原理,, 步進(jìn)電機(jī)的工作原理是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu),。當(dāng)步進(jìn)驅(qū)動器接收到一個(gè)脈沖信號,就驅(qū)動步進(jìn)電機(jī)按設(shè)定的方向轉(zhuǎn)動一個(gè)固定的角度,,它的旋轉(zhuǎn)是以固定的角度一步-一步運(yùn)行的,。可以通過控制發(fā)出脈沖個(gè)數(shù)來控制角位移量,,從而達(dá)到控制位移的目的,;同時(shí)可以通過控制脈沖頻率來控制電機(jī)轉(zhuǎn)動的速度和加速度,從而達(dá)到調(diào)速的目的,。而伺服電機(jī)內(nèi)部的轉(zhuǎn) 子是永磁鐵,,驅(qū)動器控制的U/V/W三相電形成電磁場,轉(zhuǎn)子在此磁場的作用下轉(zhuǎn)動,,同時(shí)電機(jī)自帶的編碼器反饋信號給驅(qū)動器,,驅(qū)動器根據(jù)反饋值與目標(biāo)值進(jìn)行比較,調(diào)整轉(zhuǎn)子轉(zhuǎn)動的角度,。伺服電機(jī)的精度決定于編碼器的分辨率,。

第壹,步進(jìn)電機(jī)和伺服電機(jī)的控制方式不同,,步進(jìn)電機(jī)是通過控制脈沖的個(gè)數(shù)控制轉(zhuǎn)動角度的,,一個(gè)脈沖對應(yīng)一個(gè)步距角,,但是沒有反饋信號,電機(jī)不知道具體走到了什么位置,,位置精度不夠高,。 伺服電機(jī)也是通過控制脈沖個(gè)數(shù),伺服電機(jī)每旋轉(zhuǎn)一 個(gè)角度,,都會發(fā)出對應(yīng)數(shù)量的脈沖,,同時(shí)驅(qū)動器也會接收到反饋回來的信號,和伺服電機(jī)接受的脈沖形成比較,,這樣系統(tǒng)就會知道發(fā)了多少脈沖給伺服電機(jī),,同時(shí)又收了多少脈沖回來,就能夠很精確的控制電機(jī)的轉(zhuǎn)動,,從而實(shí)現(xiàn)精確的定位,,可以達(dá)到0.001mm。
第二,, 過載能力不同步進(jìn)電機(jī)一般不具有過載能力,。交流伺服電機(jī)具有較強(qiáng)的過載能力。以皮爾磁交流伺服系統(tǒng)為例,,它具有速度過載和轉(zhuǎn)矩過載能力,。其大轉(zhuǎn)矩為額轉(zhuǎn)矩的3倍,可用于克服慣性負(fù)載在啟動瞬間的慣性力矩,。步進(jìn)電機(jī)因?yàn)闆]有這種過載能力,,在某些工作場合就不能用步進(jìn)電機(jī)工作了。
第三,, 速度響應(yīng)性能不同步進(jìn)電機(jī)從靜止加速到工作轉(zhuǎn)速(一般為每分鐘幾百轉(zhuǎn)) 需要200 ~ 400ms。交流伺服系統(tǒng)的加速性能較好,,以皮爾磁交流伺服電機(jī)為例,,從靜止加速到其額定轉(zhuǎn)速3000 r/min。僅需幾ms,,可用于要求快速啟停并且位置精度要求較高的控制場臺,。
步進(jìn)電機(jī)和伺服電機(jī)是工控領(lǐng)域應(yīng)用zui廣泛的兩類產(chǎn)品,而它們的核心分別是步進(jìn)電機(jī)控制器與伺服電機(jī)控制器,。
一,、工作原理的不同
步進(jìn)電機(jī)控制器:它是一種能夠發(fā)出均勻脈沖信號的電子產(chǎn)品,它發(fā)出的信號進(jìn)入步進(jìn)電機(jī)驅(qū)動器后,,會由驅(qū)動器轉(zhuǎn)換成步進(jìn)電機(jī)所需要的強(qiáng)電流信號,,帶動步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。步進(jìn)電機(jī)控制器能夠準(zhǔn)確的控制步進(jìn)電機(jī)轉(zhuǎn)過每一個(gè)角度,。驅(qū)動器所接收的是脈沖信號,,每收到一個(gè)脈沖,,驅(qū)動器會給電機(jī)一個(gè)脈沖使電機(jī)轉(zhuǎn)過一個(gè)固定的角度,就因?yàn)檫@個(gè)特點(diǎn),,步進(jìn)電機(jī)才會被廣泛的應(yīng)用到現(xiàn)在的各個(gè)行業(yè)里,。
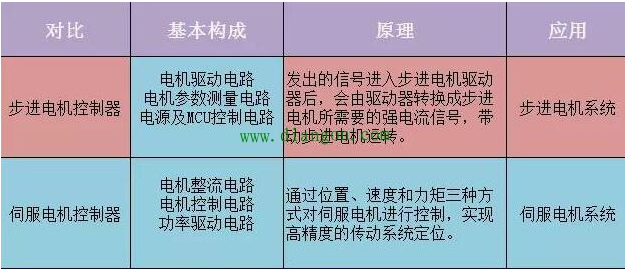
伺服電機(jī)控制器:它是用來控制伺服電機(jī)的一種控制器,其作用類似于變頻器作用于普通交流馬達(dá),,屬于伺服系統(tǒng)的一部分,,主要應(yīng)用于高精度的定位系統(tǒng)。一般是通過位置,、速度和力矩三種方式對伺服電機(jī)進(jìn)行控制,,實(shí)現(xiàn)高精度的傳動系統(tǒng)定位,目前是傳動技術(shù)的產(chǎn)品,。
二,、組成也不一樣
1、步進(jìn)電機(jī)控制器的三大電路
電機(jī)驅(qū)動電路:在H橋電路的基礎(chǔ)上設(shè)計(jì)步進(jìn)電機(jī)驅(qū)動電路,。采用分立元件MOS管搭建雙H橋驅(qū)動電路是成熟的電機(jī)控制方案,,電路不復(fù)雜,根據(jù)MOS管的不同工作電流的上限甚至可以高達(dá)數(shù)十安培,,是理想的步進(jìn)電機(jī)驅(qū)動器方案,。

電機(jī)參數(shù)測量電路:電機(jī)電流采樣電阻選用康銅電阻,一端連接H橋下方,,另一端接GND,。電壓電流信號調(diào)理電路采用LM324運(yùn)放搭建,電壓跟隨后送入MCU,,由MCU內(nèi)置10Bit A/D轉(zhuǎn)換器進(jìn)行A/D采樣,。機(jī)殼溫度監(jiān)測選用數(shù)字溫芯片DS18B20,將其貼至電機(jī)外殼表面,,實(shí)時(shí)監(jiān)測溫度參數(shù)并送入MCU,。
電源及MCU控制電路:系統(tǒng)中的驅(qū)動電路用輸入電壓供電,MCU和藍(lán)牙模塊需要額外的3.3V電壓供電,,傳統(tǒng)的線性穩(wěn)壓器效率低,、尺寸大且發(fā)熱嚴(yán)重,因此使用DC—DC開關(guān)電源方式提供3.3V電壓,,保證器件的正常工作,。
2、伺服電機(jī)控制器的電路組成
電機(jī)整流電路:整流單元主要的拓?fù)潆娐肥侨嗳珮虿豢卣麟娐?,?shí)質(zhì)是一組共陰極與一組共陽極的三相半波可控整流電路的串聯(lián),,習(xí)慣將其中陰極連接在一起的三個(gè)晶間管稱為共陰極組;陽極連接在一起的三個(gè)晶閘管稱為共陽極組,。

功率驅(qū)動電路:功率驅(qū)動單元一般采用智能功率模塊,,通過三相全橋整流電路對輸入的三相電或者市電進(jìn)行整流,,得到相應(yīng)的直流。功率單元是使用功率電力電子器件進(jìn)行整流,、濾波,、逆變的高壓變頻器部件,主要由整流橋,、可控硅,、電解電容、IGBT等器件組成,。功率驅(qū)動單元的整個(gè)過程可以簡單的說就是AC-DC-AC的過程,。
電機(jī)控制電路:主電路采用數(shù)字信號處理器作為控制核心,可以實(shí)現(xiàn)比較復(fù)雜的控制算法,,進(jìn)行智能控制,。
(來源:網(wǎng)絡(luò),版權(quán)歸原作者)
