 您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)












產(chǎn)品分類品牌分類
-
西門子可編程序控制器 西門子模擬量輸出輸入模塊 西門子數(shù)字量輸出輸入模塊 西門子通訊處理器模塊 西門子S7-1500 西門子SMART200 西門子S7-1200 西門子S7-400 西門子S7-300 西門子S7-200 西門子ET200S 6ES7153-1AA03-0XB0 6ES7307-1BA01-0AA0 6ES7307-1EA01-0AA0 6ES7307-1KA02-0AA0 6ES7952-0BA12-0XA0 6ES7972-0BA42-0XA0 6ES7972-0BB12-0XA0 6ES7972-0BA52-0XA0 6ES7972-0BB52-0XA0 6XV1830-0EH10 6XV1840-2AH10 6XV1830-3EH10
產(chǎn)品簡介
詳細介紹
湖北回收西門子PLC模塊 湖北回收西門子PLC模塊
在中國,西門子中國研究院的一個團隊正在探索實現(xiàn)未來工業(yè)環(huán)境中人機交互的基本功能。這項工作的關(guān)鍵環(huán)節(jié)之一是開發(fā)“數(shù)據(jù)手套”以捕捉和傳遞人手的運動,、手勢和壓力,,從而向機器人描述復雜的指令和展示安全處理各種物體的方法。
自1952年*亮相以來,,工業(yè)機器人一直給人以龐大,、沉重、靜止,、對人類構(gòu)成危險,,且只能執(zhí)行預先設(shè)定的重復性任務(wù)的印象。盡管這些描述基本符合事實,,但微電子,、傳感器、聯(lián)網(wǎng)和算法等技術(shù)的不斷發(fā)展,,為半自主機器人新紀元的到來做好了準備,。
此外,產(chǎn)品的復雜度與日俱增,,人們對個性化解決方案的需求也日益增長,。這兩個看似矛盾的趨勢互相融合,推動了重大變革的發(fā)生,。由此,,以輕型工業(yè)機器人為特征的靈活生產(chǎn)概念成為了新的關(guān)注焦點。輕型工業(yè)機器人可以經(jīng)濟,、輕松地完成重新部署,。較為重要的是,它們能夠安全地與人類并肩工作,。隨著這些新特性的不斷發(fā)展,,它們將為德國“工業(yè)4.0”概念中所展望的短周期、小批量生產(chǎn)打開大門,,同時也為自主助手的出現(xiàn)打下基礎(chǔ),。
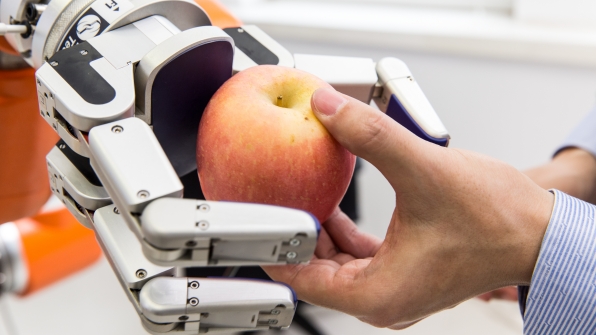
在進行特定任務(wù)的訓練時,機械臂必須知道應(yīng)該對物體施加多大壓力,,以確保準確抓取并實現(xiàn) 移動序列,。
用手套“交談”
現(xiàn)在,西門子正沿著這個方向,,開展廣泛深入的研發(fā)工作,。例如,在中國,,一組西門子中國研究院的研究人員正在探索用于實現(xiàn)未來工業(yè)環(huán)境中人機交互的基本功能,。乍看起來,,自然語言處理或許是促進交互的 技術(shù),因為它不僅高效,,而且已經(jīng)發(fā)展成熟,。由蘋果公司開發(fā)的Siri就使用了自然語言處理技術(shù)。然而,,在嘈雜的工廠環(huán)境中,,它卻并非理想之選。因此,,西門子中國研究院的研究人員正在開發(fā)數(shù)據(jù)手套,,以捕捉人手的運動和手勢,從而向機器人描述復雜的指令,。
目前,,一只原型數(shù)據(jù)手套已在測試階段。它裝配了17個帶有慣性傳感器和磁性傳感器的微電子機械系統(tǒng),。通過整合來自傳感器的輸入,,手套的手勢(包括每只手指的運動)將被合并傳送到“受訓”的機械臂與機械手處,以實時執(zhí)行特定任務(wù),。隨著這項技術(shù)的發(fā)展,,機器學習將被用來訓練機器人,教它們識別以手勢表達的越來越復雜的指令,,向機器人分配高級任務(wù),,以及教會機器人新的技能。
機械臂與機械手在進行任務(wù)訓練時必須學會對各類物體施加不同的壓力,,這樣才能優(yōu)化抓取和移動的動作,。在這方面,數(shù)據(jù)手套*,。例如,,西門子的原型手套配有作用力反饋功能,這就在人手與機器人之間形成了交互閉環(huán),。數(shù)據(jù)手套的指尖裝有由微控制器驅(qū)動的壓電陶瓷元件,。當抓握特定物體時,手套可以產(chǎn)生對應(yīng)準確壓力值的不同頻率和振幅的振動,。一旦接收到這些數(shù)據(jù),,機械手就可以根據(jù)自身壓力傳感器返回的實時反饋,向物體施加適當壓力,。
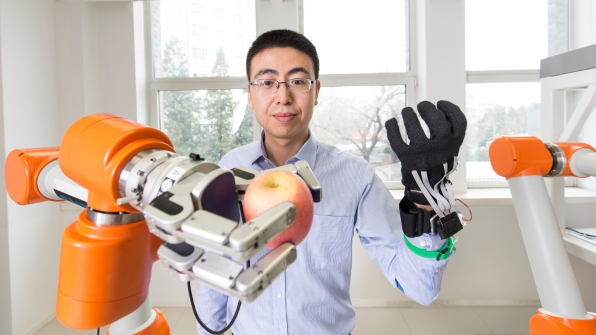
在博士的帶領(lǐng)下,西門子中國研究院的研究人員正在開發(fā)數(shù)據(jù)手套,。
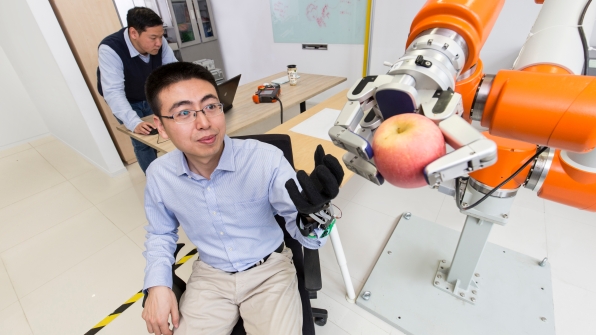
數(shù)據(jù)手套可以捕捉人手的運動和手勢,,向機器人傳遞復雜指令,。
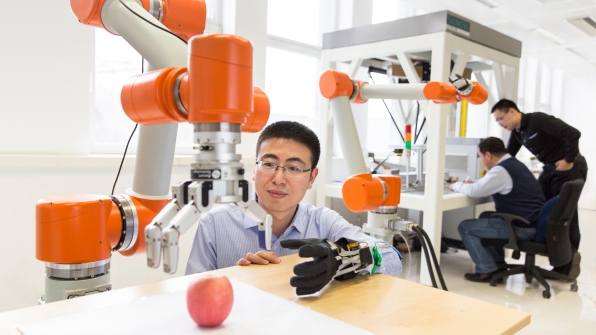
當數(shù)據(jù)手套的用戶執(zhí)行手部動作時,傳感器將實時記錄輸入并將數(shù)據(jù)轉(zhuǎn)發(fā)至受訓機械臂,。
請將扳手遞給我
在高度靈活的未來生產(chǎn)環(huán)境中,,機器人將無暇參加長期培訓。同人類工人一樣,,它們要現(xiàn)學現(xiàn)用,。作為朝這個方向邁出的*步,西門子中國研究院的研究人員已經(jīng)開發(fā)出了一套算法,,讓機器人能夠執(zhí)行一項非常重要的基礎(chǔ)任務(wù):抓取未知物體,。這項任務(wù)雖然對人類而言輕而易舉,但對于機器人卻挑戰(zhàn)性,,因為機器人必須自主決定正確的抓取手勢和與目標物體的接觸點,。有趣的是,這項任務(wù)的解決方案是以Xbox游戲機所用微軟設(shè)備Kinect為基礎(chǔ)開發(fā)出來的,。
Kinect可以同時捕捉圖像中的深度數(shù)據(jù)和紅綠藍(RGB)數(shù)據(jù),。前者用于確定抓取手勢,而后者則用于計算抓取點,。根據(jù)這個數(shù)據(jù)組合,,機器人可以將目標物體與周圍圖像分離,并把它代入基于極限學習算法的模型,。這個過程將順序生成一組 抓取點,。前文中已經(jīng)提到,在抓取物體時,,機器人需要注意施加的作用力水平,。一方面,作用力應(yīng)當足夠大以確保抓牢,;另一方面,,作用力也應(yīng)當足夠小,以免損壞物體,。目前,,工程師可以預先設(shè)定作用力水平,并通過安裝在機器人抓取裝置上的壓力傳感器來完成監(jiān)測,。然而,,這種情況也將改變,因為一套自適應(yīng)的作用力控制機制已在研發(fā)當中,。
安全*
如果機器人助手真的能與人類并肩工作,,那么安全將是一項重要的課題。為此,,西門子中國研究院的研究人員正在研發(fā)基于阻抗控制理論的全新控制機制,,它可以同時控制機械臂的位置和作用力,。只要人類工人明確規(guī)定作用力的大值,這種機器人就能夠推算出 運動,,從而在保持高準確度的情況下成為安全的自主助手,。目前,研究人員正在研發(fā)阻抗控制型末端執(zhí)行器來檢驗可能的模型和算法,。這種模型和算法將控制機器人在動作過程中對物體施加的作用力,。例如,末端執(zhí)行器的一個可能的應(yīng)用便是以恒定作用力水平打磨器件,。
阻抗控制技術(shù)還可以應(yīng)用在機器人編程中,。傳統(tǒng)的機器人編程不僅專業(yè)性很強,而且費時,、昂貴,。工程師要接受專業(yè)培訓,并進行大量實踐練習,。但阻抗控制型機器人助手可以在培訓領(lǐng)域開啟一片新天地,。在這種培訓中,僅通過示范,,機器人就可以同時完成學習與編程,。這些示范動作可以被分解為不同的拖、放過程,,機械臂通過一系列“教學點”學習特定的位置和手勢,。如此,機器人助手就能學會整個程序并可精確重復,。對于快速變動的命令與需求,,這種模式將成為一種簡單而靈活的解決方案。