 您好, 歡迎來到化工儀器網(wǎng)
您好, 歡迎來到化工儀器網(wǎng)








| 產(chǎn)地類別 | 國產(chǎn) | 應(yīng)用領(lǐng)域 | 電子/電池 |
|---|
產(chǎn)品簡介
詳細介紹
VS-IR04工業(yè)機器人基礎(chǔ)教學實訓平臺
一,、項目建設(shè)簡介
(一)設(shè)計原則
項目建設(shè)方案緊貼“工業(yè)4.0”發(fā)展背景,,以當前*的工業(yè)機器人技術(shù),結(jié)合物聯(lián)網(wǎng)工廠和智慧制造為主題,,為學校打造一個專門針對工業(yè)機器人人才培養(yǎng)的基地,,在培養(yǎng)本校專業(yè)學生的同時,可為當?shù)仄髽I(yè)提供一個工業(yè)機器人人才培養(yǎng)和進階的平臺,。
項目建設(shè)以工業(yè)機器人專業(yè)課程體系為主線,,配套所需的軟硬件,,實現(xiàn)專業(yè)人才的培養(yǎng)。根據(jù)不同功能,,分為工業(yè)機器人基礎(chǔ)教學應(yīng)用實訓室和工業(yè)機器人離線編程仿真實訓室。

(項目建設(shè)整體布局效果圖,、圖片僅供參考)
VS-IR04工業(yè)機器人基礎(chǔ)教學實訓平臺:以《工業(yè)機器人基礎(chǔ)知識》,、《工業(yè)機器人應(yīng)用基礎(chǔ)》兩門專業(yè)核心課程為主線,配套工業(yè)機器人基礎(chǔ)教學工作站為實踐硬件平臺,,包含豐富的教學資源和實驗指導資料,。該實驗室以培養(yǎng)工業(yè)機器人技術(shù)基礎(chǔ)應(yīng)用人才為目標,可以提供工業(yè)機器人結(jié)構(gòu)認知,、關(guān)鍵部件組成,、基本設(shè)置及操作、在線示教編程,、簡單軌跡規(guī)劃,、工作站結(jié)構(gòu)了解及搭建、工業(yè)機器人模擬工藝應(yīng)用實踐等內(nèi)容的教學工作,,面對對象主要包括在校機械類,、電氣類等專業(yè)的學生、企業(yè)一線職工及社會人員,,可以進行基礎(chǔ)教學和知識技能培訓,,也可以向本地企業(yè)推廣工業(yè)機器人應(yīng)用技術(shù),為其轉(zhuǎn)型升級提供技術(shù)指導和支持,。

(工業(yè)機器人基礎(chǔ)教學應(yīng)用實訓室布局效果圖,、圖片僅供參考)
工業(yè)機器人離線編程仿真實訓室:以《工業(yè)機器人離線編程仿真技術(shù)及應(yīng)用》專業(yè)核心課程為主線,配套工業(yè)機器人離線編程仿真軟件,,包含豐富的教學資源和實驗指導資料,。該實訓室以培養(yǎng)工業(yè)機器人技術(shù)高級應(yīng)用人才為目標,以工業(yè)機器人離線編程仿真技術(shù)為核心,,可以提供工業(yè)機器人虛擬教學,、離線編程仿真及應(yīng)用等內(nèi)容的教學工作,面對對象主要包括具有較高學習能力和技能水平的在校學生,、企業(yè)高級技術(shù)工人,,使其深入學習工業(yè)機器人離線編程仿真技術(shù)。

(工業(yè)機器人離線編程仿真實訓室布局效果圖,、圖片僅供參考)
(二)建設(shè)內(nèi)容
項目建設(shè)主要包含工業(yè)機器人基礎(chǔ)教學應(yīng)用實訓室和工業(yè)機器人離線編程仿真實訓室,。

離線編程仿真實訓室主要側(cè)重于老師的實際操作講解,用于實訓前的理論培訓,,創(chuàng)新性的把企業(yè)的培訓模式與理論課教學結(jié)合起來,,把枯燥的理論課教學變?yōu)樵诶蠋煵僮饕龑碌?ldquo;做學教”一體化互動教學
基礎(chǔ)教學應(yīng)用實訓室側(cè)重于學生的實際操作訓練和討論,,該室是讓學生通過真實的實訓教學來掌握專業(yè)知識與技能,把過去的驗證性實訓教學提升為學生的自主動手學習,,對學生在學習過程中遇見的工業(yè)機器人調(diào)試方面問題不拘泥于一種解決方法,,突出學生解決問題方面能力的擴展,特別強調(diào)學生的“學”和實際解決問題,、動手能力的訓練,。
(三)實訓內(nèi)容
為方便使用工業(yè)機器人基礎(chǔ)教學實訓設(shè)備進行教學工作,針對工業(yè)機器人的操作特點和工作站的組成,,我公司定制設(shè)計了多項實訓任務(wù),,實現(xiàn)任務(wù)驅(qū)動式教學,讓學生在學習技能的過程中明確目標,、在挑戰(zhàn)中完成學習,,實訓任務(wù)及目標內(nèi)容可根據(jù)學校要求做定制修改,同時,,為便于教學,,我公司為學校提供了豐富的教學資源,包括實訓指導教材,、視頻錄像,、實訓習題等內(nèi)容。

二,、建設(shè)方案
(一)工業(yè)機器人基礎(chǔ)教學應(yīng)用實訓室

(圖片僅供參考,,請以實物為準)
1、工業(yè)機器人
(1)設(shè)備簡介
采用國內(nèi)外品牌ABB IRB-120-3/0.6工業(yè)機器人,,6關(guān)節(jié),,有效負載3Kg,臂展0.58米,,重復定位精度±0.01mm(ISO標準),,配套防護等級IP30,工業(yè)緊湊型控制柜,,帶機器人控制軟件(PROBOTWARE5.0)版本,。
底座由20mm厚鋼板焊接而成??刂破?20V電源,,本體到控制器7m長電纜,示教器具中文操作界面,,本體到示教器7m長線纜,,支持熱插拔。帶DC24V 16in/16out IO卡。帶二次開發(fā)選項,,提供基于VB和C#的二次開發(fā)功能,;帶DeviceNet通訊方式;在機器人使用壽命內(nèi),,使用機器人離線軟件進行實時程序,、IO、機器人3D動態(tài)動作監(jiān)控,。遠程機器人系統(tǒng)備份與恢復功能,;具有自動工具重量與載荷檢測設(shè)定功能;具有機器人全壽命保養(yǎng)自動維護檢測系統(tǒng)功能,;自帶自定義可編程IO;具有3D實時舒適搖桿手動操作系統(tǒng),;具有電池電量環(huán)保節(jié)省功能,;提供終身機器人系統(tǒng)功能升級;支持RAPID編程語言規(guī)范,,并直接解釋執(zhí)行,;機器人控制系統(tǒng)原配固態(tài)存儲器容量1G,并支持USB擴展為副存儲器,;控制器帶視頻接口,;具有機器人運動軌跡實時微調(diào)功能。
(2)配置清單
序號 | 物料名稱 | 規(guī)格參數(shù) | 數(shù)量 | 備注 |
1 | 機器人本體 | IRB120-3/0.6,,負載3Kg,,臂展580mm | 9臺 | ABB |
2 | 機器人控制器 | IRC5緊湊型控制器,220V電源 | 9套 | ABB |
3 | 機器人示教器 | FlexPendant,彩色觸摸屏,3D操縱桿,,中文界面 | 9套 | ABB |
4 | IO卡 | DC24V 16in/16out | 9塊 | ABB |
5 | 通訊接口 | DeviceNet | 9塊 | ABB |
6 | 連接電纜 | 本體到示教器7米,,本體到控制器7米 | 9套 | ABB |
7 | 軟件光盤 | 機器人配套軟件光盤 | 9套 | ABB |
8 | 機器人底座 | 20mm優(yōu)質(zhì)冷軋鋼制作 | 9套 | 文圣 |
(3)技術(shù)參數(shù)


2、基礎(chǔ)臺架
(1)設(shè)備簡介
基礎(chǔ)臺架為鋁型材搭至而成的雙層結(jié)構(gòu)件,;上層臺面具有T型槽方便安裝,,下層用于放置控制柜;四個腿腳帶4個高度可調(diào)的活動腳輪,,工作臺可自由移動,。機架由型材搭接而成,圓角,,側(cè)面1.2mm冷軋鋼包封,,底部配置萬向剎車滑輪及上下伸縮固定支撐柱,方便支撐與移動,。桌面采用帶T型槽的面板型材制作而成,,方便不同實訓對象的安裝與拆卸。一側(cè)開門,三面封板,,門上安裝凹式拉手和門鎖或磁力扣,,底部封鋼板,系統(tǒng)控制部分水平配滑道放置在實訓臺中央前門開時,,控制掛板可拉出,。
尺寸:1800mm×1200mm×800mm(長×寬×高),承重260公斤,。
(2)設(shè)備圖片

(圖片僅供參考,,請以實物為準)
(3)配置清單
序號 | 物料名稱 | 規(guī)格參數(shù) | 數(shù)量 | 備注 |
1 | 實訓臺機架 | 采用工業(yè)鋁型材搭接而成 | 9套 | 文圣 |
2 | 實訓臺面板 | 采用帶T型槽工業(yè)鋁型材搭接而成 | 9套 | 文圣 |
3 | 實訓臺封板 | 采用1.2mm優(yōu)質(zhì)冷軋鋼制作而成,表面特殊處理 | 9套 | 文圣 |
4 | 支撐腳 | 配置有剎車滾輪及可調(diào)支撐腳 | 9套 | 文圣 |
5 | 系統(tǒng)安裝板 | 水平配滑道放置在實訓臺內(nèi),,門開時,,可拉出 | 9套 | 文圣 |
3、基礎(chǔ)培訓模塊
(1)設(shè)備簡介
基礎(chǔ)培訓工作臺用來進行工業(yè)機器人基礎(chǔ)培訓實訓,,可完成工業(yè)機器人操作方式選擇,、速度調(diào)整、坐標系設(shè)定及手動操作機器人等基礎(chǔ)操作實訓,,程序編寫,、啟動執(zhí)行程序和停止程序等運動編程實訓,機器人零點設(shè)定及系統(tǒng)維護等技能實訓,,工具 TCP 標定,、坐標系設(shè)置、復雜運動軌跡編程等能力實訓,,還可以利用軟筆在工作臺面上模擬書法寫字實訓,,以增加學習的樂趣。
基礎(chǔ)培訓工作臺,,主要由軌跡規(guī)劃/寫字繪圖面板,、TCP標定筆形工具等組成。其中,,軌跡規(guī)劃/寫字繪圖面板為一種可隨時更換繪圖底板的300×200×150的方形工作臺,。TCP標定為機器人校準工具坐標所用,材質(zhì)為ABS,。筆形工具采用通用軟筆,,可由氣動工具快速夾取。材質(zhì)為ABS
(2)設(shè)備圖片
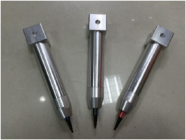
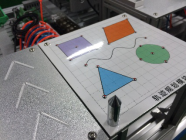
(筆形工具) (繪圖板)
(3)配置清單
序號 | 物料名稱 | 規(guī)格參數(shù) | 數(shù)量 | 備注 |
1 | 軌跡規(guī)劃面板 | 采用工業(yè)鋁型材搭接而成 | 9套 | 文圣 |
2 | 繪圖底板 | 可根據(jù)需要定制 | 1批 | 文圣 |
3 | TCP標定 | ABS材料,,尺寸:40×40×100mm | 9套 | 文圣 |
4 | 筆形工具 | 根據(jù)繪圖需要定制 | 1批 | 文圣 |
4,、氣動夾具模塊
(1)設(shè)備簡介
工業(yè)機器人采用氣動夾爪實現(xiàn)抓取筆形工具、模擬工件和物料,,氣動夾爪的結(jié)構(gòu)件采用鋁合金材料,,進行陽極氧化處理,,保證使用壽命。氣動驅(qū)動元件采用日本 SMC 品牌,,保證穩(wěn)定的抓持力,。
實驗臺臺架上工具庫,提供了三個筆形工具的存儲位置,,每個位置都配有到位檢測裝置并可顯示工具是否放置到位,。同時,工具庫還提供了一個筆形工具固定安裝位置,。
(2)設(shè)備圖片

(圖片僅供參考,,請以實物為準)
(3)配置清單
序號 | 物料名稱 | 規(guī)格參數(shù) | 數(shù)量 | 備注 |
1 | 氣動元件 | 定位精度:±0.01 | 9套 | SMC |
2 | 夾具結(jié)構(gòu)件 | 鋁合金材質(zhì),陽極氧化處理 | 9套 | 文圣 |
5,、PLC模塊
(1)設(shè)備簡介
采用西門子S7-1200PLC,,包含24KB程序存儲器、16KB數(shù)據(jù)存儲器,、10KB保持性存儲器,。板載數(shù)字量IO為24點輸入/16點輸出;包含4個高速計數(shù)器,、3路100kHz脈沖輸出、布爾運算0.15u/s指令,、移動字1.2u/s指令,、實數(shù)數(shù)字運算3.6u/s指令;接口包含1個以太網(wǎng)接口和一個RS485接口,。周邊相關(guān)元器件全部配齊,。
(2)設(shè)備圖片

(圖片僅供參考,請以實物為準)
(3)配置清單
序號 | 物料名稱 | 規(guī)格參數(shù) | 數(shù)量 | 備注 |
1 | CPU模塊 | 型號:S7-1200 | 9套 | 西門子 |
2 | 電源模塊 | 型號: S8JC-Z15024C | 9套 | 歐姆龍 |
3 | 數(shù)字量輸入模塊 | 型號:EM321,,16DI | 9套 | 西門子 |
4 | 數(shù)字量輸出模塊 | 型號:EM322,,16DO | 9套 | 西門子 |
6、模擬上下料模塊
(1)設(shè)備簡介
模擬工業(yè)壓鑄機構(gòu),,壓鑄端采用氣缸頂料,,出料端采用真空吸盤,吸取物料,,然后通過氣缸將吸取的物料,,拉至合適的位置,實現(xiàn)機器人抓取,。
包含一套模擬沖壓加工設(shè)備,,可實現(xiàn)物料的入料、沖壓和出料動作,,采用氣缸驅(qū)動,,缸徑10mm,行程為50mm/100mm,帶磁性開關(guān),??勺孕信袛嗌狭衔皇欠裼形锪希捎脙?nèi)置小型放大器型光電傳感器實現(xiàn)檢測,,檢測方式為擴散反射型,,檢測距離5mm~100mm。包含取料檢測傳感器,,采用放大器內(nèi)置圓柱型光電傳感器實現(xiàn)檢測,,為對射型傳感器,檢測距離20m,。
(2)設(shè)備圖片

(圖片僅供參考,,請以實物為準)
(3)配置清單
序號 | 物料名稱 | 規(guī)格參數(shù) | 數(shù)量 | 備注 |
1 | 壓鑄主體 | 采用鋁板和型材,根據(jù)實際需要定制 | 1套 | 西門子 |
2 | 頂料氣缸 | MA16x30SCALB,,行程:16mm | 1套 | 亞德客 |
3 | 壓鑄氣缸 | ACQ32x125SLB,,L=125 | 1套 | 亞德客 |
4 | 真空吸盤 | ZPT10UN-A5,壓力:0.4MPa | 1套 | 亞德客 |
5 | 電磁閥 | 4V110,,四位三通電磁閥 | 2件 | 亞德客 |
6 | 傳感器 | 光電傳感器和位置傳感器 | 1批 | 歐姆龍 |
7,、模擬物料傳輸碼垛模塊
(1)設(shè)備簡介
裝置主要由自動送料模塊、輸送帶模塊,、物料暫存模塊組成,。其中自動送料模塊通過頂料氣缸自動送料,通過傳輸線將物料傳輸?shù)轿恢?。機器人開始抓取物料,。物料位置通過位置傳感器檢測,氣缸通過PLC信號驅(qū)動,。
輸送帶模塊,,可實現(xiàn)物料傳送,支撐結(jié)構(gòu)為鋁合金,,PVC皮帶傳動,,采用步進電機驅(qū)動,扭矩2.2Nm,,電流4A,。包含自動上料裝置,采用氣缸驅(qū)動,,缸徑16mm,,行程50mm,帶磁性開關(guān),。
自動送料模塊可自行判斷料庫是否已空,,采用光纖傳感器實現(xiàn)檢測,,傳感器與放大器分離型,檢測距離36mm,。輸送帶末端有物料到位傳感器,,采用內(nèi)置小型放大器型光電傳感器實現(xiàn)檢測,檢測方式為擴散反射型,,檢測距離5mm~100mm,。物料暫存模塊材料鋁合金,支撐為型材,,可多暫存6個物料,。
(2)設(shè)備圖片

(圖片僅供參考,請以實物為準)
(3) 配置清單
序號 | 物料名稱 | 規(guī)格參數(shù) | 數(shù)量 | 備注 |
1 | 支架 | 采用鋁板和型材,,根據(jù)實際需要定制 | 1套 | 文圣 |
2 | 推料氣缸 | TN10X50S,,行程:50mm | 2套 | 亞德客 |
3 | 位置傳感器 | 接近感應(yīng) | 1批 | SICK |
4 | 電機 | 24V直流電機 | 2套 | 中大 |
5 | 跺盤 | 定制 | 2套 | 文圣 |
8、操控臺
(1)設(shè)備簡介
操控臺包含了操作面板,、IO 組件,、觸摸屏等組成,分別實現(xiàn)不同功能和教學內(nèi)容,。操作面板由鑰匙開關(guān),、指示燈、蜂鳴器和按鈕組成,,可實現(xiàn)對工作站開啟,、停止、復位和急停操作,。IO 組件包含8 個數(shù)字量輸入選擇開關(guān)和 8 個數(shù)字量輸出LED指示燈,實現(xiàn)與 PLC 數(shù)字量 IO模塊的通信控制,;采用配套工業(yè)用電源和安裝導軌,,利用7寸彩色觸摸屏作為人機交互接口,可以實現(xiàn)對工業(yè)機器人運行模式和程序控制,、模擬生產(chǎn)線工作臺相關(guān)氣動元件和電動元件控制,、工作站運行監(jiān)控等功能。
(2)設(shè)備圖片

(圖片僅供參考,,請以實物為準)
(3)配置清單
序號 | 物料名稱 | 規(guī)格參數(shù) | 數(shù)量 | 備注 |
1 | 操作面板 | 型號:LS-110A-KZMB | 9套 | 文圣 |
2 | IO組件 | 型號:LS-110A-50DB | 9套 | 文圣 |
3 | 人機交互接口 | 型號:TP700,,7英寸TFT真彩液晶屏 | 9套 | 西門子 |
4 | 控制柜 | 型號:LS-110A-KZDG | 9套 | 文圣 |
5 | 操作面板 | 型號:LS-110A-KZMB | 9套 | 文圣 |
9、供氣系統(tǒng)
(1)設(shè)備簡介
供氣系統(tǒng)包含氣泵,、氣源處理裝置和電磁閥,。其中,氣泵采用德國進口,,全銅線繞組,,啟動電流小,,動力強勁,持續(xù)恒壓工作,。額定功率780W,、壓力0.7MPa、流量135L/min,、儲氣量30L,。氣源處理裝置包含調(diào)壓閥和空氣過濾器,其工作介質(zhì)為空氣,,調(diào)壓范圍為0.15MPa~0.9MPa,,濾芯精度為40μm。電磁閥為兩位五通換向閥,。
(2)設(shè)備圖片

(圖片僅供參考,,請以實物為準)
(3) 配置清單
序號 | 物料名稱 | 規(guī)格參數(shù) | 數(shù)量 | 備注 |
1 | 氣泵 | 型號:YBL-110 | 9套 | 上海 |
2 | 氣源處理裝置 | 型號:GF1500,過濾精度40um | 9套 | 亞德客 |
3 | 電磁閥 | 型號:4V110-06-100M | 9套 | 亞德客 |
10、安全防護系統(tǒng)
(1)設(shè)備簡介
為保證工業(yè)機器人設(shè)備安全,,每臺工業(yè)機器人多功能基礎(chǔ)實訓臺都配有獨立的安全防護裝置,。防護裝置采用鋁合金型材框架透明亞克力板進行防護,整個安全防護裝置裝有安全光幕進行防護,。
工業(yè)機器人基礎(chǔ)教學工作站提供了安全防護系統(tǒng),,整體尺寸為3000mm*3000mm*1900mm,將人員與設(shè)備物理隔離,,保證安全,。安全防護房由鋁合金和鋼化玻璃構(gòu)成,安裝有關(guān)門檢測傳感器防止工業(yè)機器人運行中人員進入引發(fā)危險,,提供三色報警燈提示工作站當前狀態(tài),,并在多個顯著位置設(shè)置系統(tǒng)急停開關(guān),可在發(fā)生危險時及時停止設(shè)備運行,。安全光幕由LSL40安全光幕,、工業(yè)安全防護欄等安全防護裝置構(gòu)成,對設(shè)備和人員提供必要的安全防護,,營造工業(yè)環(huán)境情景,,提高學院安全操作意識。采用國內(nèi)瑞科(ROKO)LSL40四周型安全區(qū)域光幕,,對人員和機器人四周*防護,,進行侵入有效安全防護。
(2)設(shè)備圖片

(圖片僅供參考,,請以實物為準)
(3)配置清單
序號 | 物料名稱 | 規(guī)格參數(shù) | 數(shù)量 | 備注 |
1 | 安全光幕 | 型號: LSL40 | 9套 | 科力 |
2 | 安全護欄 | 型號:LS-110A-FHZJ | 9套 | 文圣 |
(二)工業(yè)機器人離線編程仿真實訓室
1,、SUNNYTECH工業(yè)機器人離線編程軟件
(1)系統(tǒng)簡介
通過使用學習機器人離線編程軟件,掌握機器人除示教編程外的較常用的第二種編程方式,,解決復雜路徑編程問題,。學習多種機器人的6軸,,移動機器人,7軸機器人,,外部tcp等多種編程方式,,通過實際機器人工作檢驗離線編程的有效。同時軟件嵌入多個應(yīng)用場景和工藝實踐,,使學生可脫離實體學習多項機器人知識,。

(2)實訓目標
1.學習離線編程的編程模式與習慣,促進對國外常用軟件的學習,。
2.學習離線編程與實體應(yīng)用的結(jié)合,。
3.通過虛擬場景學習多項機器人應(yīng)用技術(shù)。
4.通過軟件學習機器人的理論知識,。
(3)項目特色
軟件在功能上與行業(yè)內(nèi)主流軟件*,,讓學生更容易過渡到主流軟件的學習。離線編程產(chǎn)生的程序為工業(yè)級精度和工藝性,,可直接用于實際,。虛擬場景為實際工業(yè)移植,與實際的貼合度高,。
2,、功能參數(shù)
(1)正版軟件,可提供持續(xù)的技術(shù)支持服務(wù),;
(2)可實現(xiàn)多個品牌多個型號的工業(yè)機器人進行模型導入,、軌跡規(guī)劃、運動仿真和控制代碼輸出,,實現(xiàn)離線編程(參考品牌ABB,、KUKA、Staubli,、廣州數(shù)控,、新時達等主流品牌);
(3)可實現(xiàn)工業(yè)機器人多種編程模式選擇,,如手持工具或手持工件;
(4)采用通用3D技術(shù),,與CAD教學銜接,,支持prt(UG)、prt(ProE),、CATPart(CATIA),、sldpart(Solidworks)等3D CAD系統(tǒng)的模型文件導入,可通過三維球功能對模型進行平移,、旋轉(zhuǎn)操作,;
(5)軌跡生成基于CAD數(shù)據(jù),,簡化軌跡生成過程,提高精度,,可利用實體模型,、曲面或曲線直接生成運動軌跡;
(6)包含豐富的軌跡調(diào)整優(yōu)化工具包,,如碰撞檢查,、工業(yè)機器人可達性、姿態(tài)奇異點,、軸超限,、節(jié)拍估算、軌跡自動調(diào)整優(yōu)化等功能,;
(7)包含豐富的工藝應(yīng)用工具包,,如自由設(shè)計定義工具及其坐標信息,實際工件與模型工件的坐標校準確保軌跡精度,,碼垛工藝包模擬真實物料抓取擺放過程,,通過點云數(shù)據(jù)直接生成打孔軌跡,支持APT Source和NC格式G代碼的導入并自動轉(zhuǎn)化為工業(yè)機器人運動軌跡等功能,;
(8)提供工業(yè)機器人虛擬教學模塊,,如虛擬示教器、機器人部件裝配,、自動生成仿真運動視頻并上傳云端等內(nèi)容,;
(9)軌跡與CAD模型特征關(guān)聯(lián),可根據(jù)CAD模型的改變自動更新軌跡數(shù)據(jù),,即CAD模型尺寸變大,,軌跡可自動更新無需編輯操作;
(10)可實現(xiàn)物料搬運碼垛工藝仿真,,即通過設(shè)置工藝過程機器人可抓取模擬物料從A點抓取后搬運到B點并放下,;
(11)可實現(xiàn)將編程結(jié)果仿真運行過程并輸出動畫,上傳云端自動生成而二維碼,,通過瀏覽器可直接播放,;
3、工業(yè)機器人技術(shù)基礎(chǔ)方面課程教材及教學資源
4,、配置清單
序號 | 貨物 | 物料名稱 | 規(guī)格參數(shù)/技術(shù)參數(shù) | 數(shù)量 | 原產(chǎn)商 | ||||||
工業(yè)機器人多功能基礎(chǔ)教學實訓設(shè)備 | |||||||||||
1 | 工業(yè)機器人 | 機器人本體 | IRB120-3/0.6,,負載3Kg,臂展580mm | 9臺 | ABB | ||||||
2 | 機器人控制器 | IRC5緊湊型控制器,,220V電源 | 9套 | ABB | |||||||
3 | 機器人示教器 | FlexPendant,彩色觸摸屏,3D操縱桿,,中文界面 | 9套 | ABB | |||||||
4 | IO卡 | DC24V 16in/16out | 9塊 | ABB | |||||||
| 通訊接口 | DeviceNet | 9塊 | ABB | |||||||
| 連接電纜 | 本體到示教器7米,本體到控制器7米 | 9套 | ABB | |||||||
| 軟件光盤 | 機器人配套軟件光盤 | 9套 | ABB | |||||||
| 機器人底座 | 20mm優(yōu)質(zhì)冷軋鋼制作 | 9套 | 文圣 | |||||||
5 | 基礎(chǔ)臺架 | 實訓臺機架 | 采用工業(yè)鋁型材搭接而成 | 9套 | 文圣 | ||||||
6 | 實訓臺面板 | 采用帶T型槽工業(yè)鋁型材搭接而成 | 9套 | 文圣 | |||||||
| 實訓臺封板 | 采用1.2mm優(yōu)質(zhì)冷軋鋼制作而成,,表面特殊處理 | 9套 | 文圣 | |||||||
| 支撐腳 | 配置有剎車滾輪及可調(diào)支撐腳 | 9套 | 文圣 | |||||||
| 系統(tǒng)安裝板 | 水平配滑道放置在實訓臺內(nèi),,門開時,,可拉出 | 9套 | 文圣 | |||||||
7 | 基礎(chǔ)培訓模塊 | 軌跡規(guī)劃面板 | 采用工業(yè)鋁型材搭接而成 | 9套 | 文圣 | ||||||
8 | 繪圖底板 | 可根據(jù)需要定制 | 1批 | 文圣 | |||||||
9 | TCP標定 | ABS材料,尺寸:40×40×100mm | 9套 | 文圣 | |||||||
10 | 筆形工具 | 根據(jù)繪圖需要定制 | 1批 | 文圣 | |||||||
7 | 氣動夾具模塊 | 氣動元件 | 定位精度:±0.01 | 9套 | SMC | ||||||
8 | 夾具結(jié)構(gòu)件 | 鋁合金材質(zhì),,陽極氧化處理 | 9套 | 文圣 | |||||||
11 | PLC模塊 | CPU模塊 | 型號:S7-1200 | 9套 | 西門子 | ||||||
12 | 電源模塊 | 型號: S8JC-Z15024C | 9套 | 歐姆龍 | |||||||
13 | 數(shù)字量輸入模塊 | 型號:EM321,,16DI | 9套 | 西門子 | |||||||
14 | 數(shù)字量輸出模塊 | 型號:EM322,16DO | 9套 | 西門子 | |||||||
15 | 模擬上下料模塊 | 壓鑄主體 | 采用鋁板和型材,,根據(jù)實際需要定制 | 1套 | 西門子 | ||||||
16 | 頂料氣缸 | MA16x30SCALB,,行程:16mm | 1套 | 亞德客 | |||||||
17 | 壓鑄氣缸 | ACQ32x125SLB,L=125 | 1套 | 亞德客 | |||||||
18 | 真空吸盤 | ZPT10UN-A5,,壓力:0.4MPa | 1套 | 亞德客 | |||||||
19 | 電磁閥 | 4V110,,四位三通電磁閥 | 2件 | 亞德客 | |||||||
7 | 模擬物料傳輸碼垛模塊 | 支架 | 采用鋁板和型材,根據(jù)實際需要定制 | 9套 | 文圣 | ||||||
8 | 推料氣缸 | TN10X50S,,行程:50mm | 9套 | 亞德客 | |||||||
9 | 位置傳感器 | 接近感應(yīng) | 1批 | SICK | |||||||
10 | 電機 | 24V直流電機 | 9套 | 中大 | |||||||
| 跺盤 | 定制 | 9套 | 文圣 | |||||||
21 | 操控臺 | 操作面板 | 型號:LS-110A-KZMB | 9套 | 文圣 | ||||||
22 | IO組件 | 型號:LS-110A-50DB | 9套 | 文圣 | |||||||
23 | 人機交互接口 | 型號:TP700,,7英寸TFT真彩液晶屏 | 9套 | 西門子 | |||||||
24 | 控制柜 | 型號:LS-110A-KZDG | 9套 | 文圣 | |||||||
25 | 供氣系統(tǒng) | 氣泵 | 型號:YBL-110 | 9套 | 上海 | ||||||
26 | 氣源處理裝置 | 型號:GF1500,過濾精度40um | 9套 | 亞德客 | |||||||
27 | 電磁閥 | 型號:4V110-06-100M | 9套 | 亞德客 | |||||||
28 | 安全防護系統(tǒng) | 安全光幕 | 型號: LS-L40 | 9套 | 科力 | ||||||
29 | 安全護欄 | 型號:LS-110A-FHZJ | 9套 | 文圣 | |||||||
工業(yè)機器人離線編程仿真軟件及教學資源 | |||||||||||
30 | 離線編程軟件包 | 型號: SUNNYTECH V1.0 | 52套 | 浙大旭日 | |||||||
31 | 離線編程軟件-加密鎖 | 型號: SUNNYTECH | 52套 | 浙大旭日 | |||||||
32 | 工業(yè)機器人技術(shù)基礎(chǔ)方面課程教材及教學資源 | 與設(shè)備配套 | 1套 | 文圣 | |||||||
33 | 工業(yè)機器人現(xiàn)場編程方面課程教材及教學資源 | 與設(shè)備配套 | 1套 | 文圣 | |||||||
34 | 離線編程方面教學資源 | 與設(shè)備配套 | 1套 | 文圣 | |||||||
